Das könnte Ihnen auch gefallen
- Lab 3 DSPBEE13Dokument7 SeitenLab 3 DSPBEE13MaryamNoch keine Bewertungen
- DSP - P4 Digital Images - A-D & D-ADokument9 SeitenDSP - P4 Digital Images - A-D & D-AArmando CajahuaringaNoch keine Bewertungen
- Dip 03Dokument7 SeitenDip 03Noor-Ul AinNoch keine Bewertungen
- DSP Lab6Dokument10 SeitenDSP Lab6Yakhya Bukhtiar KiyaniNoch keine Bewertungen
- IPMVDokument17 SeitenIPMVParminder Singh VirdiNoch keine Bewertungen
- Lab 2: Introduction To Image Processing: 1. GoalsDokument4 SeitenLab 2: Introduction To Image Processing: 1. GoalsDoan Thanh ThienNoch keine Bewertungen
- Laboratory 1: DIP Spring 2015: Introduction To The MATLAB Image Processing ToolboxDokument7 SeitenLaboratory 1: DIP Spring 2015: Introduction To The MATLAB Image Processing ToolboxAshish Rg KanchiNoch keine Bewertungen
- Dip 04 UpdatedDokument12 SeitenDip 04 UpdatedNoor-Ul AinNoch keine Bewertungen
- Multimedia System Design Lab 7 PDFDokument10 SeitenMultimedia System Design Lab 7 PDFCh Bilal MakenNoch keine Bewertungen
- Rutgers ECE Lab 1 SolutionsDokument11 SeitenRutgers ECE Lab 1 SolutionsMaria Rizette SayoNoch keine Bewertungen
- Digital Image Processing LabDokument30 SeitenDigital Image Processing LabSami ZamaNoch keine Bewertungen
- Digital Image ProcessingDokument40 SeitenDigital Image ProcessingAltar TarkanNoch keine Bewertungen
- Simulating Speckled SAR ImagesDokument4 SeitenSimulating Speckled SAR ImagesMajed ImadNoch keine Bewertungen
- Digital Image Processing: Lab Assignements #2: Image Filtering in The Spatial Domain and Fourier TransformDokument4 SeitenDigital Image Processing: Lab Assignements #2: Image Filtering in The Spatial Domain and Fourier Transformraw.junkNoch keine Bewertungen
- 7060 Image Sensors - ProcessingDokument11 Seiten7060 Image Sensors - ProcessingFawad KhanNoch keine Bewertungen
- SD-V ManualDokument64 SeitenSD-V ManualA. B. PARDIKARNoch keine Bewertungen
- MATLABDokument24 SeitenMATLABeshonshahzod01Noch keine Bewertungen
- Lab ReportDokument73 SeitenLab ReportMizanur RahmanNoch keine Bewertungen
- Lab Manual: Department of Computer Science & EngineeringDokument26 SeitenLab Manual: Department of Computer Science & EngineeringraviNoch keine Bewertungen
- Image Processing Lab Manual 2017Dokument40 SeitenImage Processing Lab Manual 2017samarth50% (2)
- Digital Image ProcessingDokument9 SeitenDigital Image ProcessingRini SujanaNoch keine Bewertungen
- Experiment - 02: Aim To Design and Simulate FIR Digital Filter (LP/HP) Software RequiredDokument20 SeitenExperiment - 02: Aim To Design and Simulate FIR Digital Filter (LP/HP) Software RequiredEXAM CELL RitmNoch keine Bewertungen
- DTFT Analysis in MATLABDokument7 SeitenDTFT Analysis in MATLABRUTUJA MADHURENoch keine Bewertungen
- EE330 Digital Signal Processing Lab ReportDokument12 SeitenEE330 Digital Signal Processing Lab ReportRabail InKrediblNoch keine Bewertungen
- DIP NotesDokument22 SeitenDIP NotesSuman RoyNoch keine Bewertungen
- Digital Image ProcessingDokument15 SeitenDigital Image ProcessingDeepak GourNoch keine Bewertungen
- Image Processing Lab ManualDokument19 SeitenImage Processing Lab ManualIpkp KoperNoch keine Bewertungen
- Digital Image Processing Steps ExplainedDokument20 SeitenDigital Image Processing Steps ExplainedAditya100% (1)
- Digital Image Processing and Analysis Laboratory 4: Image EnhancementDokument5 SeitenDigital Image Processing and Analysis Laboratory 4: Image EnhancementDarsh SinghNoch keine Bewertungen
- 12 Lab LapenaDokument12 Seiten12 Lab LapenaLe AndroNoch keine Bewertungen
- Image Processing: ObjectiveDokument6 SeitenImage Processing: ObjectiveElsadig OsmanNoch keine Bewertungen
- Lab 4Dokument3 SeitenLab 4Kavin KarthiNoch keine Bewertungen
- F1 PDFDokument13 SeitenF1 PDFShailendra TiwariNoch keine Bewertungen
- Dip PracticalfileDokument19 SeitenDip PracticalfiletusharNoch keine Bewertungen
- Dip Manual PDFDokument60 SeitenDip Manual PDFHaseeb MughalNoch keine Bewertungen
- BM6712 Digital Image Processing LaboratoryDokument61 SeitenBM6712 Digital Image Processing LaboratoryB.vigneshNoch keine Bewertungen
- Experiment 1: Digital ImageDokument17 SeitenExperiment 1: Digital ImagehardikNoch keine Bewertungen
- DV1614: Basic edge detection using PythonDokument5 SeitenDV1614: Basic edge detection using PythonvikkinikkiNoch keine Bewertungen
- Case Study in MatlabDokument47 SeitenCase Study in MatlabscribdssrNoch keine Bewertungen
- Basic Operations in Image Processing: ObjectivesDokument6 SeitenBasic Operations in Image Processing: ObjectivesAamir ChohanNoch keine Bewertungen
- Image Processing Part 3Dokument5 SeitenImage Processing Part 3Felix2ZNoch keine Bewertungen
- Open Frameworks and OpenCVDokument43 SeitenOpen Frameworks and OpenCVДенис ПереваловNoch keine Bewertungen
- MultimediaDokument10 SeitenMultimediaRavi KumarNoch keine Bewertungen
- Merging Images Using Matlab: S.Triaška,-M.Gažo Institute of Control and Industrial InformaticsDokument5 SeitenMerging Images Using Matlab: S.Triaška,-M.Gažo Institute of Control and Industrial InformaticsJoão PiresNoch keine Bewertungen
- MP 2Dokument3 SeitenMP 2VienNgocQuangNoch keine Bewertungen
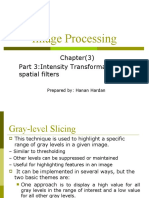
- Image Processing: Chapter (3) Part 3:intensity Transformation and Spatial FiltersDokument41 SeitenImage Processing: Chapter (3) Part 3:intensity Transformation and Spatial FiltersArSLan CHeEmAaNoch keine Bewertungen
- Pixel Operations: 4c8 Dr. David CorriganDokument26 SeitenPixel Operations: 4c8 Dr. David Corriganpavan_bmkrNoch keine Bewertungen
- Digital Image Processing Lab.: Prepared by Miss Rabab Abd Al Rasool Supervised by Dr. Muthana HachimDokument47 SeitenDigital Image Processing Lab.: Prepared by Miss Rabab Abd Al Rasool Supervised by Dr. Muthana HachimRishabh BajpaiNoch keine Bewertungen
- Dip 05Dokument11 SeitenDip 05Noor-Ul AinNoch keine Bewertungen
- U-1,2,3 ImpanswersDokument17 SeitenU-1,2,3 ImpanswersStatus GoodNoch keine Bewertungen
- Digital Image Definitions&TransformationsDokument18 SeitenDigital Image Definitions&TransformationsAnand SithanNoch keine Bewertungen
- Dip Assignment Questions Unit-1Dokument8 SeitenDip Assignment Questions Unit-1OMSAINATH MPONLINENoch keine Bewertungen
- Lab ManualDokument28 SeitenLab ManualWaleed AwanNoch keine Bewertungen
- Study & Run All The Programs in Matlab & All Functions Also: List of ExperimentsDokument10 SeitenStudy & Run All The Programs in Matlab & All Functions Also: List of Experimentsmayank5sajheNoch keine Bewertungen
- Sub BandDokument7 SeitenSub BandAriSutaNoch keine Bewertungen
- Image Processing ProjectDokument12 SeitenImage Processing ProjectKartik KumarNoch keine Bewertungen
- CS 359 Medical Image Registration J. M. Fitzpatrick Assignment 1Dokument3 SeitenCS 359 Medical Image Registration J. M. Fitzpatrick Assignment 1MohamedEssamAbdEl-KaderNoch keine Bewertungen
- Steps of digital image processingDokument27 SeitenSteps of digital image processingsniper x4848 PillaiNoch keine Bewertungen
- 09 Handout PDFDokument17 Seiten09 Handout PDFrightheartedNoch keine Bewertungen
- CoDeSys Manual V2p3Dokument388 SeitenCoDeSys Manual V2p3Akula VeerrajuNoch keine Bewertungen
- AN00131 - USB CDC ECM Class For Ethernet Over USB - 2.0.2rc1 PDFDokument31 SeitenAN00131 - USB CDC ECM Class For Ethernet Over USB - 2.0.2rc1 PDFrightheartedNoch keine Bewertungen
- 11 Handout PDFDokument34 Seiten11 Handout PDFrightheartedNoch keine Bewertungen
- Assignment 3 PDFDokument1 SeiteAssignment 3 PDFrightheartedNoch keine Bewertungen
- BEAM DIAGRAMS AND FORMULAS For Various Static Loading Conditions, AISC ASD 8 EdDokument7 SeitenBEAM DIAGRAMS AND FORMULAS For Various Static Loading Conditions, AISC ASD 8 EdEdon MorinaNoch keine Bewertungen
- Assignment 3 PDFDokument1 SeiteAssignment 3 PDFrightheartedNoch keine Bewertungen
- EjemplosDenavit HartenbergDokument171 SeitenEjemplosDenavit HartenbergJorge AlonsoNoch keine Bewertungen
- 07 Handout PDFDokument26 Seiten07 Handout PDFrightheartedNoch keine Bewertungen
- Grades CA2 s16 PDFDokument1 SeiteGrades CA2 s16 PDFrightheartedNoch keine Bewertungen
- An758 Usb CDCDokument30 SeitenAn758 Usb CDCNeneFINoch keine Bewertungen
- Battery Charger PDFDokument1 SeiteBattery Charger PDFrightheartedNoch keine Bewertungen
- Pid PDFDokument4 SeitenPid PDFrightheartedNoch keine Bewertungen
- HW3 PDFDokument2 SeitenHW3 PDFrightheartedNoch keine Bewertungen
- hw1 PDFDokument6 Seitenhw1 PDFrightheartedNoch keine Bewertungen
- PRoject2 PDFDokument12 SeitenPRoject2 PDFrightheartedNoch keine Bewertungen
- Doc7516 PDFDokument15 SeitenDoc7516 PDFrightheartedNoch keine Bewertungen
- ROBT303Lecture09 PDFDokument31 SeitenROBT303Lecture09 PDFrightheartedNoch keine Bewertungen
- HW5 PDFDokument1 SeiteHW5 PDFrightheartedNoch keine Bewertungen
- Project PDFDokument2 SeitenProject PDFrightheartedNoch keine Bewertungen
- ROBT303 Linear Control Theory Homework 3Dokument1 SeiteROBT303 Linear Control Theory Homework 3rightheartedNoch keine Bewertungen
- Root Locus: ROBT303 Linear Control Theory With LabDokument38 SeitenRoot Locus: ROBT303 Linear Control Theory With LabrightheartedNoch keine Bewertungen
- Root Locus: ROBT303 Linear Control Theory With LabDokument38 SeitenRoot Locus: ROBT303 Linear Control Theory With LabrightheartedNoch keine Bewertungen
- Root Locus: ROBT303 Linear Control Theory With LabDokument38 SeitenRoot Locus: ROBT303 Linear Control Theory With LabrightheartedNoch keine Bewertungen
- ROBT303Lecture24 PDFDokument44 SeitenROBT303Lecture24 PDFrightheartedNoch keine Bewertungen
- Controller Synthesis Via Root Locus: ROBT303 Linear Control Theory With LabDokument24 SeitenController Synthesis Via Root Locus: ROBT303 Linear Control Theory With LabrightheartedNoch keine Bewertungen
- Root Locus: ROBT303 Linear Control Theory With LabDokument28 SeitenRoot Locus: ROBT303 Linear Control Theory With LabrightheartedNoch keine Bewertungen
- Controller Synthesis Via Root Locus: ROBT303 Linear Control Theory With LabDokument24 SeitenController Synthesis Via Root Locus: ROBT303 Linear Control Theory With LabrightheartedNoch keine Bewertungen
- Robot Kinematics FundamentalsDokument50 SeitenRobot Kinematics FundamentalsrightheartedNoch keine Bewertungen
- HeteroscedasticityandHomoscedasticity SAGE Author - NotesDokument3 SeitenHeteroscedasticityandHomoscedasticity SAGE Author - Notes6hb47jbtqnNoch keine Bewertungen
- GEMS UnfoldUnwrinkle PDFDokument10 SeitenGEMS UnfoldUnwrinkle PDFBranimir DelevicNoch keine Bewertungen
- Sensor Characteristics: (Part One)Dokument31 SeitenSensor Characteristics: (Part One)morton1472Noch keine Bewertungen
- MAthcad Polinoame InterpolationDokument5 SeitenMAthcad Polinoame InterpolationLiviu StefanescuNoch keine Bewertungen
- Lectures Part - 3 (Lagrange Method)Dokument9 SeitenLectures Part - 3 (Lagrange Method)Anirudh Kumar vermaNoch keine Bewertungen
- skf2133 Chapter5nDokument26 Seitenskf2133 Chapter5nsamandondonNoch keine Bewertungen
- Interpolation: Finite DifferencesDokument18 SeitenInterpolation: Finite DifferencesImrul HasanNoch keine Bewertungen
- Noesis Exed - CFA Level 2 Formula Sheet (2023)Dokument48 SeitenNoesis Exed - CFA Level 2 Formula Sheet (2023)saurabht11293100% (2)
- Curve FittingDokument51 SeitenCurve FittingWanda Nugroho YanuartoNoch keine Bewertungen
- Intro To CalculusDokument24 SeitenIntro To CalculusCovenant AdeogoNoch keine Bewertungen
- Reading 7 Introduction To Linear RegressionDokument5 SeitenReading 7 Introduction To Linear RegressionARPIT ARYANoch keine Bewertungen
- Fem Mcqs AllDokument111 SeitenFem Mcqs AllYatikNoch keine Bewertungen
- 2009 Paper VSD JPombo Et AlDokument22 Seiten2009 Paper VSD JPombo Et AlErnest NsabimanaNoch keine Bewertungen
- Numerical Methods Chapter Three Curve Fitting: Woldia University Institute of TechnologyDokument22 SeitenNumerical Methods Chapter Three Curve Fitting: Woldia University Institute of TechnologyGetachew FentawNoch keine Bewertungen
- Numerical Methods BankDokument11 SeitenNumerical Methods BankRed RainNoch keine Bewertungen
- Viewshed Calculation AlgoDokument8 SeitenViewshed Calculation AlgoYasirNoch keine Bewertungen
- Linear Interpolation FunctionDokument5 SeitenLinear Interpolation FunctionviralrajgorNoch keine Bewertungen
- Meshfree Chapter 2Dokument26 SeitenMeshfree Chapter 2ZenPhiNoch keine Bewertungen
- Aaoc C341Dokument2 SeitenAaoc C341Vignesh_23Noch keine Bewertungen
- Template - Math 19 (MIDTERM EXAM)Dokument5 SeitenTemplate - Math 19 (MIDTERM EXAM)Kerstin SaavedraNoch keine Bewertungen
- Holy Cross College Numerical Methods MCQDokument21 SeitenHoly Cross College Numerical Methods MCQRobertBellarmineNoch keine Bewertungen
- Alagappa Chettiar Government College of Engineering and Technology Karaikudi - 630 003Dokument4 SeitenAlagappa Chettiar Government College of Engineering and Technology Karaikudi - 630 003Karunakaran M,47Noch keine Bewertungen
- TWELVE INTERPOLATION METHODS CASE STUDYDokument8 SeitenTWELVE INTERPOLATION METHODS CASE STUDYsss4sssNoch keine Bewertungen
- Geological assessment of Bouguer gravity data using GISDokument12 SeitenGeological assessment of Bouguer gravity data using GISSanjit PalNoch keine Bewertungen
- Splines and Bezier CurvesDokument32 SeitenSplines and Bezier CurvesAmit Singh BhatiNoch keine Bewertungen
- ICNAAM 2005: T. E. Simos, G. Psihoyios, Ch. Tsitouras (Eds.)Dokument13 SeitenICNAAM 2005: T. E. Simos, G. Psihoyios, Ch. Tsitouras (Eds.)Vínãy KumarNoch keine Bewertungen
- 01 InterpolationDokument9 Seiten01 InterpolationNagesh RaoNoch keine Bewertungen
- Biomedical Signal Processing and Control: Sajjad Afrakhteh, Hamed Jalilian, Giovanni Iacca, Libertario DemiDokument11 SeitenBiomedical Signal Processing and Control: Sajjad Afrakhteh, Hamed Jalilian, Giovanni Iacca, Libertario DemiANGIE MARCELA ARENAS NUÑEZNoch keine Bewertungen
- Image Enhancement Using Various Interpolation Methods: August 2012Dokument6 SeitenImage Enhancement Using Various Interpolation Methods: August 2012Simone TascaNoch keine Bewertungen
- Business Analytics 2nd Edition Evans Test BankDokument24 SeitenBusiness Analytics 2nd Edition Evans Test Bankjohndorothy0h3u100% (26)