Beruflich Dokumente
Kultur Dokumente
Sistema Robotizado Lesion Medular PDF
Hochgeladen von
Marianela Yanneth Terrado PittíOriginaltitel
Copyright
Verfügbare Formate
Dieses Dokument teilen
Dokument teilen oder einbetten
Stufen Sie dieses Dokument als nützlich ein?
Sind diese Inhalte unangemessen?
Dieses Dokument meldenCopyright:
Verfügbare Formate
Sistema Robotizado Lesion Medular PDF
Hochgeladen von
Marianela Yanneth Terrado PittíCopyright:
Verfügbare Formate
ORIGINAL
617
INTRODUCCIN
La lesin medular provoca una alteracin de la sensibilidad,
movilidad, disfuncin vesical, intestinal y sexual, cuyo grado de
discapacidad vara dependiendo de su nivel y tipo. Se estima
una incidencia anual en pases industrializados de 15-40 casos
por milln de habitantes en las lesiones traumticas [1]. Aproxi-
madamente el 50% de las lesiones medulares son incompletas,
con preservacin motora y sensitiva por debajo del nivel de le-
sin [2]. En ellas, la posibilidad de recuperacin es mayor; con-
secuentemente, tienen una mayor probabilidad de recuperar la
marcha [3].
Este evento no se debe interpretar como la capacidad de mo-
ver los miembros inferiores (MMII), sino que requiere una in-
trincada coordinacin neural que regula las fases de balanceo y
de apoyo, y permite una adaptacin al entorno [4]. Con este
fundamento, los objetivos de los programas de tratamiento re-
habilitador van dirigidos a preservar y adaptar. La preservacin
se realiza potenciando y optimizando las funciones sensitivo-
motoras residuales, y la adaptacin se consigue mediante la sus-
titucin o implementacin del soporte de carga y propulsin
con distintos tipos de ortesis y ayudas tcnicas [5-7].
La recuperacin funcional tras una lesin medular depende,
en parte, de la reorganizacin de los patrones neurales preserva-
dos [8]. Los circuitos intramedulares son capaces de una impor-
tante reorganizacin inducida, en parte, por los segmentos acti-
vos y, en parte, por la plasticidad derivada de la lesin, que ge-
nera una interpretacin de los estmulos diferente [9-11]. La
reorganizacin de los circuitos neuronales es un objetivo espe-
cfico del tratamiento; en particular, las sesiones de entrena-
miento repetitivo pueden optimizar y mejorar los movimientos
de los MMII [12]. Su base radica en la estimulacin de centros
generadores de pautas automticas de flexoextensin localiza-
dos en la mdula espinal sublesional [9,13-15].
Se puede estimular un patrn automtico de marcha usando
un tapiz rodante junto con un sistema de soporte del peso corpo-
ral [16], teniendo en cuenta que es imprescindible el contacto
del pie con el suelo para desencadenar el reflejo y que es preci-
so haber superado ya la fase de shock medular, puesto que cier-
to grado de hiperreflexia podra facilitar estos automatismos,
aunque grados graves de espasticidad bloquearan la respuesta
motora [17]. Los automatismos locomotores espinales se desen-
cadenan con mayor facilidad en relacin con una mayor dismi-
nucin del soporte de carga [13].
La activacin de los centros medulares se obtiene de la mis-
ma forma con la movilizacin de dos terapeutas que simulan la
marcha con la asistencia mecnica de una ortesis. La incorpora-
cin de sistemas electromecnicos aporta como ventajas una
mayor simetra de paso, optimizacin biomecnica, mejores es-
SISTEMA ROBOTIZADO PARA LA REEDUCACIN DE LA MARCHA
EN PACIENTES CON LESIN MEDULAR INCOMPLETA
Resumen. Introduccin. La lesin medular supone una prdida o alteracin de los patrones motores de marcha, cuya recupe-
racin depende, en parte, de la reorganizacin de los circuitos neurales preservados. Objetivo. Evaluar los cambios en la
marcha de los lesionados medulares incompletos que realizaron tratamiento con un sistema robotizado de marcha asociado a
la terapia convencional. Pacientes y mtodos. Estudio abierto, prospectivo, descriptivo, con inferencia estadstica en lesiona-
dos medulares C2-L3 clasificados segn la escala de la American Spinal Injury Association (ASIA) en grados C y D. Las va-
riables analizadas el primer y el ltimo da del estudio fueron: nmero de ambulantes, test de marcha de los 10 m, ndice de
marcha para la lesin medular Walking Index for Spinal Cord Injury, scale revision, ayudas tcnicas, balance muscular de las
extremidades inferiores, subescala locomotora de la medida de independencia funcional, escala de Ashworth modificada pa-
ra la espasticidad y escala visual analgica para el dolor. Al final se registraron los datos de la escala de impresin de cam-
bio. El anlisis se realiz mediante la t de Student, chi al cuadrado y la correlacin de Pearson; p 0,05. Resultados. 45 pa-
cientes finalizaron el estudio con una edad media de 44 14,3 aos; el 76% fueron hombres, la etiologa de la lesin fue trau-
mtica en el 58%, y el tiempo de evolucin fue de 139 70 das. Aumentaron de forma estadsticamente significativa el n-
mero de sujetos con capacidad de marcha, la velocidad en la marcha, la menor necesidad de ayudas tcnicas, la fuerza de ex-
tremidades inferiores y la independencia en las actividades de la vida diaria. Conclusin. La terapia con el sistema robotiza-
do asociado a la terapia convencional mejora la capacidad de marcha de los lesionados medulares incompletos. [REV NEU-
ROL 2009; 49: 617-22]
Palabras clave. Lesin medular incompleta. Plasticidad neuronal. Rehabilitacin de la marcha. Sistema robotizado.
Aceptado tras revisin externa: 27.03.09.
Unidad de Investigacin de Reeducacin de la Marcha. Hospital Nacional
de Parapljicos. Toledo, Espaa.
Correspondencia: Dra. Ana Esclarn de Ruz. Servicio de Medicina Fsica y
Rehabilitacin. Unidad de Investigacin de Reeducacin de la Marcha.
Hospital Nacional de Parapljicos. Finca de la Peraleda, s/n. E-45077 To-
ledo. Fax: +34 925 247 745. E-mail: anae@sescam.jccm.es
Agradecimientos. Al Dr. J.L. Rodrguez Martn, responsable del rea de
Investigacin Clnica del FISCAM, por su asesoramiento en la elaboracin
del estudio.
2009, REVISTA DE NEUROLOGA
Sistema robotizado para la reeducacin de la marcha
en pacientes con lesin medular incompleta
A. Esclarn-De Ruz, M. Alcobendas-Maestro, R. Casado-Lpez,
A. Muoz-Gonzlez, M.A. Florido-Snchez, E. Gonzlez-Valdizn
REV NEUROL 2009; 49 (12): 617-622
A. ESCLARN-DE RUZ, ET AL
REV NEUROL 2009; 49 (12): 617-622 618
tmulos propioceptivos, menos fatiga del terapeuta y sesiones
de mayor duracin y velocidad [18-20]. Un sistema electrome-
cnico adecuadamente ajustado a modo de ortesis es capaz de
conseguir una respuesta de marcha automtica, mejor verticali-
zacin axial y una disociacin ptima tronco-extremidades, y
evita el recurvatum de las rodillas en carga [21,22].
En el estudio realizado por Dobkin et al [23] no se obtuvie-
ron datos significativos a favor de los sistemas de marcha con
descarga parcial frente al tratamiento convencional en lesiones
medulares incompletas, pero se han publicado varios estudios
que demuestran la efectividad de asociar ambos tratamientos,
obteniendo una mejora significativa en el uso de los MMII que
se refleja en los parmetros espaciotemporales, en una mayor
resistencia y mejora global en el patrn de marcha [24], y en
una disminucin de las necesidades de medicacin antiespsti-
ca [14,25-27] en sujetos con lesin medular incompleta.
Partiendo de los supuestos anteriores, se ha elaborado un es-
tudio descriptivo en lesionados medulares incompletos someti-
dos a un entrenamiento adicional con el robot de marcha asisti-
da Lokomat
. El objetivo principal ha sido evaluar la mejora
en la marcha, considerando el aumento en el nmero de sujetos
capaces de realizar marcha al final del estudio, la mejora en su
funcionalidad, la disminucin de la necesidad de ayudas tcni-
cas, y el aumento de su velocidad. Como objetivos secundarios
se han cuantificado los cambios en la fuerza muscular, en el gra-
do de espasticidad, en el dolor, en la capacidad para la realiza-
cin de las actividades de la vida diaria y se ha evaluado la opi-
nin del paciente en cuanto al entrenamiento y a los resultados
conseguidos con l.
PACIENTES Y MTODOS
Se realiz un estudio abierto, prospectivo, descriptivo, con inferencia esta-
dstica, en el Hospital Nacional de Parapljicos, que consta de 210 camas y
tiene carcter monogrfico para la lesin medular.
Se seleccionaron todos los pacientes ingresados desde febrero hasta di-
ciembre de 2006 que cumplieran los siguientes criterios de inclusin: nivel
medular de cualquier etiologa desde C2 a L3 clasificados segn la escala de
la American Spinal Injury Association (ASIA) [28] en grados C y D, menos
de siete meses de evolucin desde la lesin medular, edad comprendida en-
tre 16 y 70 aos, en situacin funcional de bipedestacin asistida iniciada
con al menos una semana de anterioridad, que hubiesen sido informados so-
bre el estudio y hubiesen firmado el consentimiento informado. Se excluy
a aqullos que presentaron fracturas inestables, osteoporosis grave, lesiones
cutneas, lesiones articulares y dismetras de MMII de ms de 2 cm, bron-
coneumopata y/o cardiopata grave, peso corporal mayor de 150 kg, lce-
ras por presin localizadas en la zona de colocacin del arns o de las cin-
chas inguinales del sistema Lokomat, antecedentes previos a la lesin me-
dular de enfermedades que provocasen intolerancia al esfuerzo y dependen-
cia en actividades bsicas e instrumentales de la vida diaria, y se constituy
una muestra de 60 sujetos.
Se consideraron prdidas a todos aquellos pacientes que, una vez inclui-
dos e iniciado el estudio, no hubiesen podido finalizarlo por causas ajenas o
relacionadas con l.
Todos los seleccionados realizaron 40 sesiones de 20 minutos de duracin
de reeducacin de la marcha mediante un sistema robotizado de marcha
asistida con descarga parcial del peso corporal asociado a 30 minutos de te-
rapia convencional. Este ltimo tratamiento depende del nivel y tipo de le-
sin medular, y consiste en potenciar la musculatura residual y reeducar el
equilibrio en sedestacin, en cuadrupdica y, posteriormente, en bipedesta-
cin, previamente al inicio de la marcha en paralelas, luego con andador,
bastones de apoyo cubital y, si es posible, sin ayudas tcnicas, subida y baja-
da de escaleras, carrera en lnea recta y carrera con cambios de orientacin.
Las variables epidemiolgicas de la lesin medular se recogieron de la
historia clnica de cada sujeto previamente al inicio del tratamiento:
Variables principales: se registraron, el primer y el ltimo da del estu-
dio, la capacidad de realizar marcha mediante la subescala que valora la
funcin motora de la medida de independencia funcional (MIF), MIF-L
[29], que describe la asistencia necesaria para caminar de 15 a 46 m en
una escala de siete puntos; la velocidad mediante el test de marcha de los
10 m [30]; sus caractersticas mediante el ndice de marcha para la lesin
medular Walking Index for Spinal Cord Injury, scale revision (WISCI II)
[31]; y las ayudas tcnicas necesarias.
Variables secundarias: se registraron el primer y el ltimo da de trata-
miento el balance muscular de los MMII mediante la Lower Extremity
Motor Scale, LEMS (con una puntuacin de 0-50 valora los msculos
clave de los MMII con un rango de 0-5, siguiendo las normas de la esca-
la ASIA) [28], la espasticidad valorada segn la escala de Ashworth mo-
dificada [32], el dolor cuantificado mediante una escala visual analgica,
y la medida de independencia funcional mediante la escala MIF [29]. El
ltimo da tambin se registr la opinin del paciente mediante la escala
de impresin de cambio: se interroga al paciente acerca del equilibrio
muscular, marcha, espasticidad y dolor, puntuando desde 1 a 4, segn
que el sujeto responda que ha empeorado (1), sin cambios (0), mejora
leve sin mejora funcional (2), mejora moderada (3) o mejora importan-
te (4) [33].
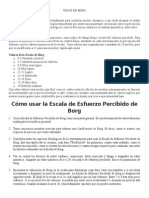
Instrumentalizacin
El sistema Lokomat consta de un tapiz rodante asociado a un arns para so-
porte del peso corporal y un sistema electromecnico que, adaptado como
una ortesis, moviliza caderas y rodillas. La flexin plantar del pie se contro-
la con cinchas antiequino (Fig. 1). El control y la coordinacin del tapiz con
el movimiento de la ortesis se lleva a cabo a travs de un sistema informti-
co, por el cual se ajusta la longitud del paso, los arcos articulares de caderas
y rodillas y la velocidad de la marcha. La reeducacin de los patrones de
marcha se realiza con una descarga parcial del peso corporal, que se consi-
gue mediante un sistema de cargas dinmicas que permiten el ascenso y
descenso del centro de masas durante la marcha. La ortesis dirige el movi-
miento de los MMII, permitiendo la intervencin de la musculatura del pa-
ciente. Esta intervencin se puede ir aumentando segn mejore la fuerza
muscular, al disminuir la fuerza gua del sistema. Este sistema consta de dis-
positivos de seguridad para conseguir una parada de emergencia.
El entrenamiento con el sistema Lokomat se realiz en 40 sesiones de 20
minutos de duracin. En la primera sesin, se tomaron medidas antropom-
tricas para seleccionar el tamao de arns, las cinchas de sujecin y longitu-
des de los brazos de movimiento de la ortesis; se aline el sistema electro-
mecnico con respecto a los MMII de cada individuo en los planos frontal y
sagital, y, adems, se llev a cabo una prueba de marcha para ajustar la lon-
gitud del paso, los arcos de movimiento articular y la velocidad, compro-
bando la adecuada disposicin de todos los elementos, el confort del pacien-
Figura 1. Sistema Lokomat.
SISTEMA ROBOTIZADO EN LESIN MEDULAR
REV NEUROL 2009; 49 (12): 617-622 619
te, la consecucin de un patrn de marcha adecuado y la familiarizacin del
paciente con el sistema y con la pantalla de biofeedback. El entrenamiento
se inici a una descarga del 60% de peso corporal, y dicho porcentaje dismi-
nuy segn la tolerancia del sujeto.
Asociado a este tratamiento se realizaron sesiones de 30 minutos de tera-
pia convencional, cuyos pasos se han descrito anteriormente.
Anlisis estadstico
Las variables recogidas, debidamente etiquetadas, se introdujeron en el pro-
grama estadstico SPSS 13.0. Para el anlisis univariante se utilizaron por-
centajes medios con la desviacin estndar. Sobre las medidas de resultado
evaluadas se realiz un contraste de igualdad de medias basado en la distri-
bucin t de Student para las variables continuas. En el caso de las variables
cualitativas se utiliz la prueba de
2
. Se obtuvo la correlacin de Pearson
para establecer la relacin entre velocidad de marcha y porcentaje de carga
en el entrenamiento. Los resultados fueron aceptados para p 0,05.
RESULTADOS
De los 60 pacientes incluidos, finalizaron el estudio un total de 45. Las cau-
sas de prdida fueron tres casos por esguince de ligamentos de tobillo (5%),
y el resto no finaliz las 40 sesiones por causas ajenas al estudio. La edad
media del grupo de estudio fue de 44 14,3 aos. El 76% eran hombres y la
etiologa de la lesin fue traumtica en el 58%. El nivel y tipo de lesin se
muestran en la tabla I. El tiempo de evolucin desde la lesin fue de 139
70 das. El entrenamiento se realiz a una velocidad media de 1,5 0,2 m/s,
con un porcentaje de descarga del peso corporal variable segn la toleran-
cia. Una vez comprobada la normalidad de los valores de la muestra, en el
test de la t de Student para datos apareados se obtuvo una mejora significa-
tiva para p < 0,001 en la capacidad de marcha. Al inicio
del estudio podan realizar marcha 25 sujetos y, al final,
36 (80%), y la puntuacin MIF-L aument desde 4,5 a
5,1 (p < 0,0001).
La velocidad de marcha mejor significativamente
(p < 0,001), pasando desde 0,25 0,1 a 0,36 0,2 m/s
durante el test de marcha de los 10 m.
El ndice WISCI II aument desde 5,5 hasta 12,5 (p <
0,001), y disminuy el nmero de sujetos que precisaban
bitutores, aumentando el uso de bastones y la capacidad
de andar sin ayudas tcnicas (Fig. 2).
Excepto en los flexores dorsales del tobillo izquierdo,
se obtuvieron diferencias significativas (p < 0,001) para
el aumento del balance muscular analtico de ambas ex-
tremidades (Tabla II). El ndice LEMS aument desde
27,8 hasta 31,73 (Tabla II).
No se obtuvieron diferencias en cuanto a la disminu-
cin de la espasticidad ni del dolor.
La independencia en las actividades de la vida diaria
medidas segn la escala MIF mejor significativamente
(p < 0,0001), pasando desde una media de 60 a una de 70
una vez finalizado el entrenamiento con el sistema.
En la escala de impresin de cambio, la respuesta de
los pacientes para el equilibrio muscular fue de mejora
importante en el 57% de los casos. La capacidad de mar-
cha mejor de forma moderada o importante en el 61%.
La espasticidad obtuvo el mayor porcentaje de respuesta
para una mejora moderada (38,5%) y el 56% de la muestra no present nin-
gn cambio en el dolor.
DISCUSIN
Respondiendo al primer objetivo, se ha podido constatar una
mejora de la marcha basada en un aumento en el nmero de su-
jetos con capacidad de marcha. Si bien existe un consenso en
que un 25% de las personas con lesin medular incompleta son
incapaces de recuperar la marcha [3,34-36], en este estudio se
comprob que el porcentaje de no ambulantes es inferior (20%).
Adems, se constat una mayor funcionalidad en el patrn de la
marcha, ya que la mayora de los sujetos andaba a pasos, tena
una menor necesidad de ortesis y utilizaba con mayor frecuen-
cia los bastones frente al andador. Tambin aumentaron aqu-
llos que no necesitaban ayudas tcnicas para andar. La veloci-
dad de desplazamiento de 0,36 m/s coincide con los datos del
ensayo clnico que est siendo realizado por Hornby, citado en
la revisin sistemtica realizada por la Cochrane sobre entrena-
miento locomotor para caminar despus de una lesin de mdu-
la espinal [37]. Estos resultados son comparables con los obte-
nidos por Werning et al [14,26] y, adems, se demuestran en un
nmero de pacientes superior al de la mayora de los trabajos
publicados [14,17-19,26,27,38], hecho que diferencia este estu-
dio de los dems.
En el ensayo clnico aleatorizado publicado por Dobkin et al
[23], los autores compararon la terapia convencional para la
marcha con el entrenamiento usando un tapiz rodante junto con
un sistema de soporte del peso corporal asociado a dicha tera-
pia, y observaron mejoras con ambos tratamientos, sin que exis-
tieran diferencias entre ellos. Sus pacientes andaban a mayor
velocidad que los nuestros, tanto antes como despus de realizar
ambas terapias, e incluso obtuvieron valores superiores a los re-
gistrados en otros estudios por los mismos autores [39]. La ma-
yor velocidad antes del tratamiento podra justificar que los be-
neficios no fueran tan evidentes, ya que se parta de una situacin
funcional muy buena (1,1 m/s en el grupo experimental y 1 m/s
Figura 2. Uso de ayudas tcnicas antes y despus del entrenamiento de la marcha con el sis-
tema Lokomat.
Tabla I. Nivel de lesin medular y tipo segn la clasificacin de la Ameri-
can Spinal Injury Association (ASIA).
Nivel de lesin Total
C1-C7 DI-D6 D7-D12 L1-L3
ASIA C 21 5 9 3 38
ASIA D 4 3 7
Total 25 5 12 3 45
A. ESCLARN-DE RUZ, ET AL
REV NEUROL 2009; 49 (12): 617-622 620
en el grupo control), comparada con 0,25 m/s pre-
vio al tratamiento y 0,36 m/s despus de ste. En
cambio, en nuestro estudio, el balance muscular
(LEMS) de los MMII fue 31,7 al final de la tera-
pia, cifra similar a la obtenida por el autor en otro
estudio [39], pero que difiere y es claramente su-
perior a las obtenidas en el ensayo clnico anterior
(22 en el grupo experimental y 25 en el control)
[23]. El equilibrio muscular mejor de forma glo-
bal y analtica, como ya haban observado otros
autores [21,40,41]. Dietz et al [15] observaron que
las mejoras funcionales no se podan justificar
nicamente por la activacin de los automatismos
intramedulares, sino que la potenciacin muscular
secundaria a este tipo de entrenamiento desempe-
aba un papel fundamental en los individuos con
lesin medular incompleta. A esta misma conclu-
sin llegaron Colombo et al [18,19] en estudios
ms recientes.
Autores como Felici et al [27] asociaron al ta-
piz rodante y a la descarga del peso corporal el
uso de reciprocadores como ortesis de marcha en
seis sujetos, y cuantificaron el gasto energtico
midiendo el consumo de oxgeno, concluyendo
que este tipo de entrenamiento mejoraba a corto
plazo la eficacia de la marcha y a largo plazo, ade-
ms, el estado fsico general del paciente.
Werning et al [14] observaron una reduccin
en la necesidad de medicacin antiespstica. Esta
mejora en la espasticidad podra deberse al efecto
de la movilizacin, a la ritmicidad del movimien-
to y al trabajo agonista-antagonista conseguido
como respuesta automtica, que desbloquea los
patrones de contraccin caractersticos de la reor-
ganizacin interneuronal en el segmento medular
daado. Edgerton et al [9] comprobaron estos da-
tos electromiogrficamente, y uno de sus hallaz-
gos ms importantes fue la aparicin de actividad
electromiogrfica en la musculatura flexora de la
extremidad en fase de oscilacin como respuesta a
la carga en la extremidad contralateral. En este es-
tudio no se objetiva una disminucin significativa
en la cuantificacin de la espasticidad segn la es-
cala de Ashworth, igual que en el estudio de Wirz
et al [3], a pesar de lo cual s mejora la marcha y
ms llamativamente tambin mejora la capacidad
para la realizacin de las actividades de la vida
diaria. Este hecho probablemente se justifique por-
que los individuos presentaban una puntuacin baja de espasti-
cidad al inicio del estudio, que no ocasion problemas para la
mejora del resto de parmetros del estudio, a pesar de no haber
variado de forma significativa durante el estudio.
No se produjeron variaciones significativas en el dolor, re-
sultado esperado, ya que no se ha hallado ninguna relacin di-
recta entre los automatismos medulares y el dolor. En el estudio
publicado por Martin-Ginis y Latimer [42] sobre el efecto del
entrenamiento en el dolor, concluyeron que los sujetos que ex-
perimentaban mejora en el dolor eran aqullos que denotaban
una mejora en la sensacin de bienestar con el ejercicio.
La mejora en la puntuacin en la escala MIF es producto
del aumento de la independencia en los parmetros relaciona-
dos con la marcha, datos similares a los obtenidos por Ditunno
et al [31].
Dietz et al [15] concluyeron que los automatismos locomo-
tores medulares se desencadenan con ms facilidad en relacin
con una mayor disminucin del soporte de carga, y la correla-
cin encontrada en nuestros resultados entre mayor velocidad
de marcha y trabajo con menor desgravitacin lo corrobora.
La impresin de cambio percibida por los pacientes coinci-
de en todos los parmetros analizados con los hallazgos consta-
tados estadsticamente, nicamente la percepcin de la espas-
ticidad difiere. Probablemente la mejora en ella haya sido cl-
nicamente relevante a pesar de no haber mejorado de forma sig-
nificativa. La manifestacin positiva de los pacientes coincide
Tabla II. Muestras apareadas, balance muscular analtico, por extremidad y considerado
globalmente antes y despus del tratamiento (n = 45).
Media Desviacin EEM Significacin
estndar (dos colas)
BM psoas D inicial 2,9111 1,36219 0,20306
BM psoas D final 3,3333 1,2792 0,19069 0,001
BM cudriceps D inicial 3,3111 1,20269 0,17929
BM cudriceps D 3,6444 1,22763 0,183 0,001
BM tibial anterior D inicial 2,9091 1,45982 0,22008
BM tibial anterior D 3,4091 1,2997 0,19594 0,016
BM extensor del primer dedo D inicial 2,7727 1,5381 0,23188
BM extensor del primer dedo D final 3,3182 1,49063 0,22472 0,01
BM trceps sural D inicial 3,0682 1,35368 0,20408
BM trceps sural D final 3,6591 1,29297 0,19492 0
BM psoas I inicial 2,6889 1,53478 0,22879
BM psoas I final 3,0444 1,4453 0,21545 0,028
BM cudriceps I inicial 3,1333 1,39153 0,20744
BM cudriceps I final 3,5333 1,2173 0,18146 0,014
BM tibial anterior I inicial 2,5455 1,70437 0,25694
BM tibial anterior I final 3,4091 1,2997 0,19594 0,004
BM extensor del primer dedo I inicial 2,5 1,57746 0,23781
BM extensor del primer dedo I final 2,9773 1,62092 0,24436 0,004
BM trceps I sural I inicial 2,8182 1,49841 0,22589
BM trceps sural I final 2,9773 1,62092 0,24436 0,443
BM MID inicial 14,8 6,25809 0,9329
BM MID final 17 6,06405 0,90398 0
BM MII inicial 12,6222 6,73623 1,00418
BM MII final 14,6 6,5206 0,97203 0,002
LEMS inicial 27,8 12,3723 1,8443
LEMS final 31,7333 11,005 1,6405 0
BM: balance muscular; D: derecho; EEM: error estndar de la media; I: izquierdo; LEMS: Lower
Extremity Motor Scale, valoracin global del equilibrio muscular de ambas extremidades; MID:
miembro inferior derecho; MII: miembro inferior izquierdo.
SISTEMA ROBOTIZADO EN LESIN MEDULAR
REV NEUROL 2009; 49 (12): 617-622 621
con la percepcin de un aumento en la calidad de vida tras la
realizacin de este tipo de tratamiento [43,44]. En un estudio
publicado, Lucareli et al [24] no obtienen datos a favorables en
este sentido. Los autores creen que se debe al tiempo limitado
de tratamiento.
Existe un consenso general en que los sistemas repetitivos
de marcha favorecen la reeducacin de la marcha en sujetos con
lesin medular incompleta [45,46], pero la mejora en la marcha
y en el resto de los parmetros no se puede justificar nicamen-
te por el entrenamiento con dichos sistemas, sino que tambin
se produce por la evolucin natural de la lesin medular y la efi-
cacia de la terapia convencional.
Si bien este estudio no tiene grupo control, el nmero de pa-
cientes incluidos representa uno de los ms elevados de los pu-
blicados hasta la fecha, y se ha realizado como estudio prelimi-
nar a un ensayo clnico aleatorizado con una muestra de 80 pa-
cientes, cuyo objetivo principal ser conocer si existen diferen-
cias entre el entrenamiento de la marcha con terapia convencio-
nal y el entrenamiento con el sistema Lokomat.
En conclusin, el entrenamiento de la marcha mediante el siste-
ma Lokomat asociado a la terapia convencional proporciona
una mejora en la capacidad, funcionalidad y velocidad de la
marcha en los lesionados medulares incompletos. Tambin me-
jora el balance muscular de las extremidades inferiores y, en ge-
neral, la independencia en las actividades de la vida diaria. Los
sujetos manifiestan haber observado mejora en la fuerza, en la
marcha y en la espasticidad.
BIBLIOGRAFA
1. National Spinal Cord Injury Statistical Center. Junio 2006. URL: http://
www.uab.edu/NSCISC. [04.03.2009].
2. Fawcett JW, Curt A, Steeves JD, Coleman WP, Tuszynski MH, Lam-
mertse D, et al. Guidelines for the conduct of clinical trials for spinal
cord injury as developed by the ICCP panel: spontaneous recovery af-
ter spinal cord injury and statistical power needed for therapeutic clin-
ical trials. Spinal Cord 2007; 45: 190-205.
3. Wirz M, Zemon DH, Rupp R, Scheel A, Colombo G, Dietz V, et al. Ef-
fectiveness of automated locomotor training in patients with chronic
incomplete spinal cord injury: a multicenter trial. Arch Phys Med Re-
habil 2005; 86: 672-8.
4. Capady CH. The special nature of human walking and its neural con-
trol. Trends Neurosci 2002; 25: 370-6.
5. Quintern J, Strauble A, Riener R, Bisle G. Properties of the flexion reflex
network in patients with spinal cord injuries and its possible role in hu-
man locomotion. In Gantchev N, ed. Basic motor control of functional
recovery. Sofia: St. Kliment Ohridski University Press; 2003. p. 227-39.
6. Nene AV, Hermens HJ, Zilvold G. Paraplegic locomotion: a review.
Spinal Cord 1996; 34: 507-24.
7. Kirshblum S, Ho CH, House JG, Druin E, Nead C, Drastal S. Rehabil-
itation of spinal cord injury. In Kirshblum S, Campagnolo DL, DeLisa
J, eds. Spinal cord medicine. Philadelphia: Lippincott Williams & Wil-
kins; 2001. p. 275-98.
8. Rainateau O, Schwab ME. Plasticity of motor systems after incom-
plete spinal cord injury. Nat Rev Neurosci 2001; 2: 263-73.
9. Edgerton VR, De Leon RD, Harkema SJ, Hodgson JA, London N,
Reinkensmeyer DJ, et al. Topical review. Retraining the injured spinal
cord. J Physiol 2001; 53: 15-22.
10. Nacimiento W, Sappok T, Brook G, Schoen SW, Noth J, Kreutzberg
GW. Structural changes of caudal to a low thoracic spinal cord hemi-
section in the adult rat: a light and electron microscopic study. Acta
Neuropathol 1995; 90: 552-62.
11. Courtine G, Song B, Roy RR, Zhong H, Herrmann JM, Ao Y. Recovery
of supraspinal control of stepping mediated by indirect propriospinal re-
lay connections after severe spinal cord injury. Nat Med 2008; 14: 69-74.
12. Dietz VG. Heiner Sell Memorial Lecture. Neurological plasticity after
spinal cord injury: significance for presents and futures treatments.
J Spinal Cord Med 2006; 29: 481-8.
13. Dietz V, Wirz M, Jensen L. Locomotion in patients with spinal cord in-
juries. Phys Ther 1997; 77: 508-16.
14. Werning A, Mller S, Nanassy A, Cagol E. Laufband therapy based on
rules of spinal locomotion is effective in spinal cord injured persons.
Eur J Neurosci 1995; 7: 823-9.
15. Dietz V, Wirz M, Curt A, Colombo G. Locomotor pattern in paraplegic
patients: training effects and recovery of spinal cord function. Spinal
Cord 1998; 36: 380-90.
16. Barbeau H, Fung J, Leroux A, Ladouceur M. A review of the adaptabil-
ity and recovery of locomotion after spinal cord injury. Prog Brain Res
2002; 137:9-25.
17. Werning A, Mller S. Laufband locomotion with body weight support
improved walking in persons with severe spinal cord injuries. Paraple-
gia 1992; 30: 229-38.
18. Colombo G, Wirz M, Dietz V. Driven gait orthosis for improvement of
locomotor training in paraplegic patients. Spinal Cord 2001; 39: 252-5.
19. Colombo G, Joerg M, Schreier R, Dietz V. Treadmill training of para-
plegic patients using a robotic orthosis. J Rehabil Res Dev 2000; 37:
693-700.
20. Hesse S. Locomotor therapy in neurorehabilitation. Neurorehabilitation
2001; 16: 133-9.
21. Hornby TG, Zemon DH, Campbell D. Robotic-assisted, bodyweight-
supported treadmill training in individuals following motor incomplete
spinal cord injury. Phys Ther 2005; 85: 52-66.
22. Edgerton VR, Roy RR. Robotic training and spinal cord plasticity.
Brain Res Bull 2009; 78: 4-12.
23. Dobkin B, Apple D, Barbeau H, Basso M, Behrman A, Deforge D, et al;
and the Spinal Cord Injury Locomotor Trial (SCILT) Group. Weight-
supported treadmill vs over-ground training for walking after acute in-
complete SCI. Rev Neurol (Paris) 2006; 66: 484-93.
24. Lucareli PRG, Lima MO, Lima FPS, Garbelotti SA, Gimenes RO,
Almeida JG, et al. Anlisis de la marcha y evaluacin de la calidad de
vida despus del entrenamiento de la marcha en pacientes con lesin
medular. Rev Neurol 2008; 46: 406-10.
25. Norman K, Ppin A, Barbeau H. Effects of drugs on walking after
spinal cord injury. Spinal Cord 2004; 36: 699-715.
26. Werning A, Nanassy A, Mller S. Maintenance of locomotor abilities
following laufband (treadmill) therapy in para- and tetraplegic persons:
follow-up studies. Spinal Cord 1998; 36: 744-9.
27. Felici F, Bernardi M, Rodio A, Marchettoni P, Castellano V, Macaluso
A. Rehabilitation of walking for paraplegic patients by means of tread-
mill. Spinal Cord 1997; 35: 383-5.
28. Maynard FM, Bracken MB, Creasey G, Ditunno JF, Donovan WH Jr,
Ducker TB, et al. International standards for neurological and functional
classification of spinal cord injury. Spinal Cord 1997; 35: 266-74.
29. Hall KM, Cohen ME, Wright J, Call M, Werner P. Characteristics of
the Functional Independence Measure in traumatic spinal cord injury.
Arch Phys Med Rehabil 1990; 80: 1471-6.
30. Wolf SL, Catlin PA, Gage K, Gurrucharri K, Robertson R, Stephen K.
Establishing the reliability of validity of measurements of walking time
using the Memory Functional Ambulation Profile. Phys Ther 1999; 79:
1122-33.
31. Ditunno JF, Barbeau H, Dobkin BH, Elashoff R, Harkeman S, Marino
RJ, et al. Validity of the Walking Scale for Spinal Cord injury and other
domains of function in a multicenter clinical trial. Neurorehabil Neural
Repair 2007; 21: 539-50.
32. Bohannon RW, Smith MB. Interrater reliability of a modified Ashworth
scale of muscle spasticity. Phys Ther 1987; 67: 206-7.
33. Guy W. ECDEV assessment manual psychopharmacology revised.
Rockville: Department of Health, Education and Welfare; 1976.
34. Wirz M, Van Hedel HJ, Rupp R, Curt A, Dietz V. Muscle force and gait
performance: relationships after spinal cord injury. Arch Phys Med Re-
habil 2006; 87: 1218-22.
35. Burns SP, Golding DG, Rolle WA Jr, Graziani V, Ditunno JF Jr. Recov-
ery of ambulation in motor-incomplete tetraplegia. Arch Phys Med Re-
habil 1997; 78: 1169-72.
36. Crozier KS, Cheng LL, Graziani V, Zorn G, Herbison G, Ditunno JF Jr.
Spinal cord injury: prognosis for ambulation based on quadriceps re-
covery. Paraplegia 1992; 30: 762-7.
37. Mehrholz J, Kugler J, Pohl M. Entrenamiento locomotor para caminar
despus de la lesin de la mdula espinal (Revisin Cochrane tradu-
cida). Biblioteca Cochrane Plus 2007, n. 4. Oxford: Update Software.
URL: http://www.update-software.com. [16.01.2009].
38. Alcobendas M, Lpez-Dolado E, Esclarn A, Valdizn MC. Entrena-
miento de la marcha en lesiones medulares incompletas con descarga
del peso corporal. Rev Neurol 2004; 39: 406-10.
A. ESCLARN-DE RUZ, ET AL
REV NEUROL 2009; 49 (12): 617-622 622
39. Dobkin BH, Apple D, Barbeau H, Basso M, Behrman A, Deforge D, et
al. Methods for a randomized trial of weight-supported treadmill train-
ing versus conventional training for walking during inpatient rehabili-
tation after incomplete traumatic spinal cord injury. Neurorehabil Neu-
ral Repair 2003; 17: 153-67.
40. De Leon RD, Hodgson JA, Roy RR, Edgerton VR. Retention of hind-
limb stepping ability in adults spinal cats after cessation of step train-
ing. J Neurophysiol 1999; 81: 85-94.
41. Krawetz P, Nance P. Gait analysis of spinal cord injured subjects: effects
of injury level and spasticity. Arch Phys Med Rehabil 1996; 77: 635-8.
42. Martin-Ginis KA, Latimer AE. The effects of single bout of body-
weight supported treadmill training on the feeling states of people with
spinal cord injury. Spinal Cord 2007; 45: 112-5.
43. Richards JS, Bombardier CH, Tate D, Dijkers M, Gordon W, Shewchuk
R, et al. Access to the environment and life satisfaction after spinal
cord injury. Arch Phys Med Rehabil 1999; 80: 1501-6.
44. Threlkeld AJ, Cooper LD, Monger BP, Craven AN, Haupt HG. Tem-
porospatial and kinematic gait alterations during treadmill walking with
body weight suspension. Gait Posture 2003; 17: 235-45.
45. Barbeau H, Nadeau S, Garneau C. Physical determinants, emerging
concepts, and training approaches in gait of individuals with spinal cord
injury. J Neurotrauma 2006; 23: 571-85.
46. Lam T, Eng JJ, Wolfe DL, Hsieh JTC, Whittaker M and the SCIRE Re-
search Team. A systematic review of the efficacy of gait rehabilitation
strategies for spinal cord injury. Top Spinal Cord Inj Rehabil 2007; 13:
32-57.
A ROBOTIC SYSTEM FOR GAIT RE-EDUCATION IN PATIENTS WITH AN INCOMPLETE SPINAL CORD INJURY
Summary. Introduction. A spinal cord injury involves the loss or alteration of motor patterns in walking, the recovery of which
depends partly on the rearrangement of the preserved neural circuits. Aim. To evaluate the changes that take place in the gait
of patients with incomplete spinal cord injuries who were treated with a robotic walking system in association with conventional
therapy. Patients and methods. The study conducted was an open-label, prospective, descriptive trial with statistical inference
in patients with C2-L3 spinal cord injuries that were classified as degrees C and D according to the American Spinal Injury
Association (ASIA) scale. The variables that were analysed on the first and the last day of the study were: number of walkers,
10-m gait test, the Walking Index for Spinal Cord Injury scale revision, technical aids, muscle balance in the lower limbs,
locomotor subscale of the measure of functional independence, modified Ashworth scale for spasticity and the visual analogue
scale for pain. At the end, data were recorded from the impression of change scale. The analysis was conducted by means of
Students t, chi squared and Pearsons correlation; p 0.05. Results. Forty-five patients, with a mean age of 44 14.3 years,
finished the study; 76% were males, injury was caused by trauma in 58% of cases, and the time of progression was 139 70
days. Statistically significant increases were observed in the number of subjects capable of walking, walking speed, less need
for technical aids, strength in the lower limbs and independence in activities of daily living. Conclusions. Treatment using the
robotic system in association with conventional therapy improves walking capacity in patients with incomplete spinal cord
injuries. [REV NEUROL 2009; 49: 617-22]
Key words. Gait rehabilitation. Incomplete spinal cord injury. Neuronal plasticity. Robotic system.
Das könnte Ihnen auch gefallen
- Medidas de Prevención en Fisioterapia Del Deporte IDokument4 SeitenMedidas de Prevención en Fisioterapia Del Deporte IMarianela Yanneth Terrado PittíNoch keine Bewertungen
- BorgDokument2 SeitenBorgMarianela Yanneth Terrado PittíNoch keine Bewertungen
- Fisioterapia en Lesión MedularDokument30 SeitenFisioterapia en Lesión MedularMarianela Yanneth Terrado PittíNoch keine Bewertungen
- Cronograma de Actividades RealizadasDokument1 SeiteCronograma de Actividades RealizadasMarianela Yanneth Terrado PittíNoch keine Bewertungen
- Anatomia Del Sistema RespiratorioDokument43 SeitenAnatomia Del Sistema RespiratorioMarianela Yanneth Terrado PittíNoch keine Bewertungen
- Lesión Neurona MotoraDokument25 SeitenLesión Neurona MotoraMarianela Yanneth Terrado Pittí100% (1)
- TEMPLE FayDokument17 SeitenTEMPLE FayMarianela Yanneth Terrado PittíNoch keine Bewertungen
- Posiciones Clínicas o TerapéuticasDokument19 SeitenPosiciones Clínicas o TerapéuticasMarianela Yanneth Terrado Pittí67% (3)
- Resumen de Neuroanatomía y NeurofisiologíaDokument12 SeitenResumen de Neuroanatomía y NeurofisiologíaMarianela Yanneth Terrado PittíNoch keine Bewertungen
- GongyoDokument11 SeitenGongyoMarianela Yanneth Terrado Pittí100% (1)
- Modulo de ElectroterapiaDokument169 SeitenModulo de ElectroterapiaMarianela Yanneth Terrado PittíNoch keine Bewertungen
- Marianela VocabularioDokument22 SeitenMarianela VocabularioMarianela Yanneth Terrado PittíNoch keine Bewertungen
- 109261-Triptico Mujeres ArregladoDokument2 Seiten109261-Triptico Mujeres ArregladonelsondamianNoch keine Bewertungen
- Metodo de Evaluacion GoniometríaDokument30 SeitenMetodo de Evaluacion GoniometríaGaby Ventura AlfonzoNoch keine Bewertungen
- Propósito y Principios de La Medición ArticularDokument6 SeitenPropósito y Principios de La Medición ArticularMarianela Yanneth Terrado PittíNoch keine Bewertungen
- Vivir Desde El CorazonDokument17 SeitenVivir Desde El Corazonltcolasagaste49Noch keine Bewertungen
- TEMA 2 Membrana Celular Trnasporte 16-17Dokument56 SeitenTEMA 2 Membrana Celular Trnasporte 16-17Isabel Méndez LosaNoch keine Bewertungen
- Biología Primer Examen de RepasoDokument7 SeitenBiología Primer Examen de RepasoOtaku DomoNoch keine Bewertungen
- Protocolo EMDR para Mejorar El Rendimiento en El DeporteDokument4 SeitenProtocolo EMDR para Mejorar El Rendimiento en El Deporteantonio lemus gallego0% (1)
- DESARROLLO DEL APARATO CARDIOVASCULAR Grupo 5Dokument15 SeitenDESARROLLO DEL APARATO CARDIOVASCULAR Grupo 5Eglee RodriguezNoch keine Bewertungen
- Distribucjjión de Puntos Regios Profunda de La CaraDokument10 SeitenDistribucjjión de Puntos Regios Profunda de La CaraSheiry VergaraNoch keine Bewertungen
- Riesgos de La Oxigenoterapia en Las Urgencias MédicasDokument8 SeitenRiesgos de La Oxigenoterapia en Las Urgencias MédicasDaniel MorochoNoch keine Bewertungen
- Una Aspiradora de Aprendizaje - Lucía Amelia Ledesma TorresDokument1 SeiteUna Aspiradora de Aprendizaje - Lucía Amelia Ledesma TorresProfrFerNoch keine Bewertungen
- Introduccion A La Enfermeria.Dokument38 SeitenIntroduccion A La Enfermeria.José Kamilo Arroyo VidalNoch keine Bewertungen
- R Series Guía Del Usuario PDFDokument206 SeitenR Series Guía Del Usuario PDFClaudia CedeñoNoch keine Bewertungen
- Elaboracion y Control de Calidad de VinoDokument95 SeitenElaboracion y Control de Calidad de VinoAlexis Rodriguez100% (1)
- 2,4 DinitrofenolDokument2 Seiten2,4 DinitrofenolAdrian Rodriguez CerezoNoch keine Bewertungen
- Iliana Gorguet PiLIBRODokument132 SeitenIliana Gorguet PiLIBROJose Jose Jose OmarNoch keine Bewertungen
- Los FugitivosDokument6 SeitenLos FugitivosmaverickferNoch keine Bewertungen
- Taller de EndocrinologiaDokument12 SeitenTaller de EndocrinologiapedroNoch keine Bewertungen
- Formato - A06 Informe Mensual Del Residente de ActividadDokument6 SeitenFormato - A06 Informe Mensual Del Residente de Actividadfabyana CabreraNoch keine Bewertungen
- Clasificación de Los Seres VivosDokument2 SeitenClasificación de Los Seres VivosDiana Carolina Burbano RuanoNoch keine Bewertungen
- Ejercicios de TMP Equipo 3Dokument15 SeitenEjercicios de TMP Equipo 3Diana Puescas OjedaNoch keine Bewertungen
- El Citoplasma PDFDokument2 SeitenEl Citoplasma PDFFrançois CastañedaNoch keine Bewertungen
- Pediatria Resumen Cuerpos ExtrañosDokument6 SeitenPediatria Resumen Cuerpos ExtrañosVíctor Cruz CeliNoch keine Bewertungen
- Diapositivas Conduccion Del Impulso y Excitabilidad CelularDokument60 SeitenDiapositivas Conduccion Del Impulso y Excitabilidad Celularkirys18Noch keine Bewertungen
- Epulis FisuradoDokument6 SeitenEpulis FisuradoCale MillanNoch keine Bewertungen
- Funciones de La Vitamina B2Dokument3 SeitenFunciones de La Vitamina B2Frinné Izquierdo UrbanoNoch keine Bewertungen
- Evaluacion Del Sistema CirculatorioDokument3 SeitenEvaluacion Del Sistema CirculatorioAnonymous MSbrQM375% (4)
- Metodos Alternativos para Mejorar El Bienestar Del PacienteDokument4 SeitenMetodos Alternativos para Mejorar El Bienestar Del Pacienteaxel RojasNoch keine Bewertungen
- 04 TranspiraciónDokument6 Seiten04 TranspiraciónFernandoCorredorNoch keine Bewertungen
- TRAUMA CRANEOENCEFÁLICO Tatiana Álvarez SaaDokument69 SeitenTRAUMA CRANEOENCEFÁLICO Tatiana Álvarez SaaCorazondechocolatecolombia Tatianaalvarezsaa100% (1)
- EDAD ESCOLAR CARACT. ANATOMOFiSiOLÓGiCAS PDFDokument127 SeitenEDAD ESCOLAR CARACT. ANATOMOFiSiOLÓGiCAS PDFJenny Quiroz HuanambalNoch keine Bewertungen
- PLAN DE CUIDADOS AsmaDokument5 SeitenPLAN DE CUIDADOS AsmaAlexx Hernandez100% (1)
- Enam Obstetricia 1vDokument207 SeitenEnam Obstetricia 1vKatheryne TejadaNoch keine Bewertungen