Das könnte Ihnen auch gefallen
- Advanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionVon EverandAdvanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionNoch keine Bewertungen
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Von EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Noch keine Bewertungen
- Sat Math Formulas PDFDokument2 SeitenSat Math Formulas PDFkhalsa warriorNoch keine Bewertungen
- Structural Theory 1 (Part 2)Dokument11 SeitenStructural Theory 1 (Part 2)GinoOcampoNoch keine Bewertungen
- B. Inversely As The Square ofDokument6 SeitenB. Inversely As The Square ofcielo_cetd367067% (3)
- Cosine RuleDokument6 SeitenCosine Rulehwa5181Noch keine Bewertungen
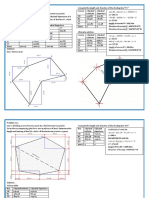
- Problem Set 10 Partition of Land1 PDFDokument14 SeitenProblem Set 10 Partition of Land1 PDFsairin parkNoch keine Bewertungen
- MODULE 4-Basic Calculus PDFDokument10 SeitenMODULE 4-Basic Calculus PDFEzekiel0% (1)
- Group CommunicationDokument25 SeitenGroup Communicationafiqzero100% (1)
- Safey & SOP (Hydraulic)Dokument3 SeitenSafey & SOP (Hydraulic)afiqzeroNoch keine Bewertungen
- SPM Add Maths Formula List Form5Dokument28 SeitenSPM Add Maths Formula List Form5Sayantani GhoshNoch keine Bewertungen
- PSCAD Course Notes 01Dokument73 SeitenPSCAD Course Notes 01JenniferKujanpaa100% (1)
- Free Crochet PatternsDokument12 SeitenFree Crochet PatternsWilma Jayakumar100% (2)
- MCR3U Exam Review 2013Dokument9 SeitenMCR3U Exam Review 2013Hari MenonNoch keine Bewertungen
- Final Exam SolutionDokument18 SeitenFinal Exam SolutionSalah AL-HakimiNoch keine Bewertungen
- Lab 2: Damped Torsional Oscillations 1Dokument4 SeitenLab 2: Damped Torsional Oscillations 1NasirAbbasNoch keine Bewertungen
- Lesson 29 Electric CircuitsDokument15 SeitenLesson 29 Electric Circuitsi5piritiNoch keine Bewertungen
- Plastic Analysis of Continuous BeamsDokument44 SeitenPlastic Analysis of Continuous BeamsCristina DumitriuNoch keine Bewertungen
- Solution Manual 3rd Ed Metal FormingDokument11 SeitenSolution Manual 3rd Ed Metal FormingmehrceNoch keine Bewertungen
- CH 4Dokument18 SeitenCH 4parin advaniNoch keine Bewertungen
- 3 Thick VesselsDokument29 Seiten3 Thick VesselsKumail Al KhuraidahNoch keine Bewertungen
- Shear Stress - A ReviewDokument16 SeitenShear Stress - A ReviewAmogh SharmaNoch keine Bewertungen
- Experiment 20: Ohm's Law: PurposeDokument4 SeitenExperiment 20: Ohm's Law: PurposeChris AngNoch keine Bewertungen
- X X X D X D - . 0 05 0 025 2: Problem 4.8Dokument2 SeitenX X X D X D - . 0 05 0 025 2: Problem 4.8Fadi W MoussaNoch keine Bewertungen
- First/Second Class Power Engineering Electrical Notes: Unit Symbol MultiplierDokument7 SeitenFirst/Second Class Power Engineering Electrical Notes: Unit Symbol Multipliercowlover55Noch keine Bewertungen
- Introduction of RF Communication: Instructional Guidelines For Laboratory WorksDokument20 SeitenIntroduction of RF Communication: Instructional Guidelines For Laboratory Worksarun14089Noch keine Bewertungen
- 9.0 Motor Drives Using Mosfets: 9.1 Buck Chopper DriveDokument12 Seiten9.0 Motor Drives Using Mosfets: 9.1 Buck Chopper DriveJose AguilarNoch keine Bewertungen
- Lecture 8 On Simple Linear RegressionDokument14 SeitenLecture 8 On Simple Linear Regressionkurikong111Noch keine Bewertungen
- Lammps Detail CommandDokument15 SeitenLammps Detail CommandSourav SahaNoch keine Bewertungen
- Vector Group ofDokument16 SeitenVector Group ofSujit AdhyaNoch keine Bewertungen
- University of Massachusetts DartmouthDokument8 SeitenUniversity of Massachusetts DartmouthchristlllNoch keine Bewertungen
- Chapter 7 Homework Solutions (All)Dokument10 SeitenChapter 7 Homework Solutions (All)Mariana VillagomezNoch keine Bewertungen
- Fast Power FlowDokument23 SeitenFast Power FlowKornepati SureshNoch keine Bewertungen
- Vibration Sample ProblemDokument24 SeitenVibration Sample ProblemvillanuevamarkdNoch keine Bewertungen
- EENG350 Lecture Notes Ch4Dokument16 SeitenEENG350 Lecture Notes Ch4yasmin20Noch keine Bewertungen
- Here Are A Few Illustrative Examples:: Maths MethodsDokument10 SeitenHere Are A Few Illustrative Examples:: Maths MethodshonkywongyNoch keine Bewertungen
- Mathematical FormulaDokument6 SeitenMathematical Formulasayhigaurav07Noch keine Bewertungen
- Paper2 MD TERMl Form42011Dokument18 SeitenPaper2 MD TERMl Form42011Siti Aminah AlwiNoch keine Bewertungen
- Chapter 2: Pressure Distribution in A Fluid: Pressure and Pressure GradientDokument46 SeitenChapter 2: Pressure Distribution in A Fluid: Pressure and Pressure Gradientkothapalli21Noch keine Bewertungen
- Chapter16 StudentDokument97 SeitenChapter16 StudentNajwa SyuhadaNoch keine Bewertungen
- Blade ElementDokument6 SeitenBlade ElementJd ValleNoch keine Bewertungen
- Influence Line Analysis of Bridges Using MATLAB: Saleh I. AldeghaitherDokument14 SeitenInfluence Line Analysis of Bridges Using MATLAB: Saleh I. AldeghaitherSilver Olguín CamachoNoch keine Bewertungen
- Process Control Lab ManualDokument51 SeitenProcess Control Lab Manualkaushikei22100% (2)
- Collision Between Identical ParticlesDokument14 SeitenCollision Between Identical ParticlesmmmortANoch keine Bewertungen
- Answering Technique Physics Paper-3Dokument10 SeitenAnswering Technique Physics Paper-3Ng Wan LinNoch keine Bewertungen
- JR Iit Spark 500x3x2 Q.PDokument10 SeitenJR Iit Spark 500x3x2 Q.PSivakumar SarmaNoch keine Bewertungen
- P07 LabNotesPt2 and Interference LabDokument37 SeitenP07 LabNotesPt2 and Interference Labcliffhanger107Noch keine Bewertungen
- Solucionario 2Dokument77 SeitenSolucionario 2Alejandro Avila ReyesNoch keine Bewertungen
- Component SpecificationsDokument5 SeitenComponent SpecificationsreddygjNoch keine Bewertungen
- F 01 Exam 2 SolutionsDokument9 SeitenF 01 Exam 2 Solutionsnesseline12Noch keine Bewertungen
- Diagnostic MathDokument3 SeitenDiagnostic MathgiophilipNoch keine Bewertungen
- Home Project Workshop Nodal Centers News & Events Survey Forum Contact Us LoginDokument15 SeitenHome Project Workshop Nodal Centers News & Events Survey Forum Contact Us LoginRajesh BaabuNoch keine Bewertungen
- Cemerlang Pmr. 2008.Dokument26 SeitenCemerlang Pmr. 2008.Muralee VeeramalaiNoch keine Bewertungen
- Report Lab1Dokument15 SeitenReport Lab1Minh NgocNoch keine Bewertungen
- Control Systems: Ms.N.Chandrakala Lect /eee Ms.M.Vijayalakshmi Lect/EeeDokument37 SeitenControl Systems: Ms.N.Chandrakala Lect /eee Ms.M.Vijayalakshmi Lect/EeeAmy MaggiNoch keine Bewertungen
- Me 2307 - Dynamics Laboratory: Class: V Semester Mechanical Sections: A & B List of ExperimentsDokument15 SeitenMe 2307 - Dynamics Laboratory: Class: V Semester Mechanical Sections: A & B List of ExperimentsNishanth ShannmugamNoch keine Bewertungen
- Notes 10: Conductor Sizing & An Example 10.0 Conductor SizingDokument12 SeitenNotes 10: Conductor Sizing & An Example 10.0 Conductor SizingJonatan Lopez RodriguezNoch keine Bewertungen
- Ee 1352 - Power System Analysis VI Semester EEE Branch (2006-2010 Batch) Unit - III - Fault Analysis - Balanced FaultDokument24 SeitenEe 1352 - Power System Analysis VI Semester EEE Branch (2006-2010 Batch) Unit - III - Fault Analysis - Balanced FaultMahmoud Samir MahmoudNoch keine Bewertungen
- Px, Px, Px: P x x x − = ∂ σ ∂ + ∂ σ ∂ + ∂ σ ∂ x x x − = ∂ σ ∂ + ∂ σ ∂ + ∂ σ ∂ ∂ ∂ ∂Dokument51 SeitenPx, Px, Px: P x x x − = ∂ σ ∂ + ∂ σ ∂ + ∂ σ ∂ x x x − = ∂ σ ∂ + ∂ σ ∂ + ∂ σ ∂ ∂ ∂ ∂golden.engineerNoch keine Bewertungen
- EEE - 332 Experiment No-5 Alternator SynchronizationDokument6 SeitenEEE - 332 Experiment No-5 Alternator SynchronizationsabitavabiNoch keine Bewertungen
- 13S1 FE1073 C2-Deformation of Elastic BodyDokument8 Seiten13S1 FE1073 C2-Deformation of Elastic BodyglenlcyNoch keine Bewertungen
- Continuous Comprehensive Evaluation Test-IDokument12 SeitenContinuous Comprehensive Evaluation Test-IsumikannuNoch keine Bewertungen
- Matriculation Physics Electric Current and Direct Current CircuitDokument118 SeitenMatriculation Physics Electric Current and Direct Current Circuitiki292Noch keine Bewertungen
- Ion Beams for Materials AnalysisVon EverandIon Beams for Materials AnalysisR. Curtis BirdNoch keine Bewertungen
- Safety and SOP (Sand Casting)Dokument4 SeitenSafety and SOP (Sand Casting)afiqzero100% (1)
- Individu Assign 1 Sem 2 1718 PDFDokument3 SeitenIndividu Assign 1 Sem 2 1718 PDFafiqzeroNoch keine Bewertungen
- Case Study Project DynamicDokument2 SeitenCase Study Project DynamicafiqzeroNoch keine Bewertungen
- Case Study Project DynamicDokument2 SeitenCase Study Project DynamicafiqzeroNoch keine Bewertungen
- 3 Power Transmission JJ615Dokument27 Seiten3 Power Transmission JJ615afiqzeroNoch keine Bewertungen
- Worksheet Jj203Dokument6 SeitenWorksheet Jj203afiqzeroNoch keine Bewertungen
- Chapter 1 Thermodynamics 2Dokument2 SeitenChapter 1 Thermodynamics 2afiqzeroNoch keine Bewertungen
- EGR 280 Mechanics 4 - Analysis of Structures TrussesDokument9 SeitenEGR 280 Mechanics 4 - Analysis of Structures TrussesafiqzeroNoch keine Bewertungen
- JJ207 Sesi Jun2013Dokument15 SeitenJJ207 Sesi Jun2013afiqzeroNoch keine Bewertungen
- Formal Letter (Softskill)Dokument2 SeitenFormal Letter (Softskill)afiqzeroNoch keine Bewertungen
- ProblemarioDokument15 SeitenProblemarioJhoan Andre'Noch keine Bewertungen
- LogarithmsDokument31 SeitenLogarithmsVenkat GowdaNoch keine Bewertungen
- Worksheet On Angles and Radian MeasureDokument4 SeitenWorksheet On Angles and Radian MeasureJose Emmanuel Sarumay ManingasNoch keine Bewertungen
- Master Sheet Trigonometry by Om SirDokument9 SeitenMaster Sheet Trigonometry by Om SiraryanNoch keine Bewertungen
- Derivatives of Inverse Trignometric Functions: 1 1 ProofDokument17 SeitenDerivatives of Inverse Trignometric Functions: 1 1 ProofNeralla ManikantaNoch keine Bewertungen
- Integral of SQRT (Tanx)Dokument1 SeiteIntegral of SQRT (Tanx)wyrmczarNoch keine Bewertungen
- Diff CalDokument40 SeitenDiff CalRobertBellarmineNoch keine Bewertungen
- CordicDokument3 SeitenCordicDarshan KumarNoch keine Bewertungen
- E Ae T A: DSP-First, 2/e Reading Assignments Reading AssignmentsDokument6 SeitenE Ae T A: DSP-First, 2/e Reading Assignments Reading AssignmentsEndai DesuNoch keine Bewertungen
- ตรีโกณมิติทรงกลม PDFDokument88 Seitenตรีโกณมิติทรงกลม PDFNabhadr BijjayeshbaipoolvangshaNoch keine Bewertungen
- 「9781337616249 - CalcMetric - 08 - CSM.pdf」複本 的副本Dokument135 Seiten「9781337616249 - CalcMetric - 08 - CSM.pdf」複本 的副本shawn wuNoch keine Bewertungen
- Convert Exponentials and LogarithmsDokument9 SeitenConvert Exponentials and LogarithmsKashif ShahNoch keine Bewertungen
- Class Xi Maths Term 2 Support Materials & MCQ Questions FinalDokument110 SeitenClass Xi Maths Term 2 Support Materials & MCQ Questions FinalAshish TiwaryNoch keine Bewertungen
- Finding Missing Sides and Angles Using SOHCAHTOADokument14 SeitenFinding Missing Sides and Angles Using SOHCAHTOAFranca OkechukwuNoch keine Bewertungen
- UEM Sol To Exerc Chap 059Dokument13 SeitenUEM Sol To Exerc Chap 059Prototype MichaelNoch keine Bewertungen
- 8 3 - Law of Cosine and Sine - Lesson PlanDokument1 Seite8 3 - Law of Cosine and Sine - Lesson Planapi-215449942Noch keine Bewertungen
- Pabalate-Math G9 Q4 WT 3Dokument6 SeitenPabalate-Math G9 Q4 WT 3Andrey PabalateNoch keine Bewertungen
- Learning Journal MATH 1201 - College Algebra, University of The People Noural Huda Alrahwan Professor DR - Varun Kumar August 9, 2023Dokument4 SeitenLearning Journal MATH 1201 - College Algebra, University of The People Noural Huda Alrahwan Professor DR - Varun Kumar August 9, 2023noraNoch keine Bewertungen
- Module 6 Lecture Notes: 6.1 An Introduction To LogarithmsDokument19 SeitenModule 6 Lecture Notes: 6.1 An Introduction To LogarithmsAlain LeeNoch keine Bewertungen
- Ambiguous Case (SSA) CaseDokument26 SeitenAmbiguous Case (SSA) CaseKen SisonNoch keine Bewertungen
- TrigonometryDokument6 SeitenTrigonometryapi-251902500Noch keine Bewertungen
- Graphing SineDokument3 SeitenGraphing SineTim CompstonNoch keine Bewertungen
- MTH101: Calculus I Lecture 6: Differentiation Formulas: International Burch UniversityDokument17 SeitenMTH101: Calculus I Lecture 6: Differentiation Formulas: International Burch Universitylu cucuNoch keine Bewertungen
- Krishnas Textbook On Trigonometry (A. R. Vasishtha)Dokument126 SeitenKrishnas Textbook On Trigonometry (A. R. Vasishtha)Ankur MishraNoch keine Bewertungen
- Higher Unit 13b Check in Test - Further TrigDokument6 SeitenHigher Unit 13b Check in Test - Further TrigSamuel KalemboNoch keine Bewertungen
- Core Competencies - Math Iv Advanced Algebra, Trigonometry and Statistic First Quarter A. FunctionsDokument5 SeitenCore Competencies - Math Iv Advanced Algebra, Trigonometry and Statistic First Quarter A. FunctionsFrederichNietszcheNoch keine Bewertungen