Das könnte Ihnen auch gefallen
- Recueil D' Épreuves DUT-BTS Mécanique - 2003Dokument19 SeitenRecueil D' Épreuves DUT-BTS Mécanique - 2003Bradley CaseNoch keine Bewertungen
- TD Train ÉpicycloïdalDokument5 SeitenTD Train Épicycloïdalpapouch1350% (2)
- DS2 PDFDokument8 SeitenDS2 PDFAbdelilah Elmesbahi100% (1)
- TD Cinematique 9Dokument5 SeitenTD Cinematique 9Jed MansouriNoch keine Bewertungen
- Polycopie de TD 2013Dokument70 SeitenPolycopie de TD 2013hichamkabel100% (1)
- Le Calcul de Roulements by FEM With CatiaDokument12 SeitenLe Calcul de Roulements by FEM With CatiaJohn JohnNoch keine Bewertungen
- Exercices Partie1Dokument8 SeitenExercices Partie1Paola CinnellaNoch keine Bewertungen
- Réducteur À Arbre CreuxDokument10 SeitenRéducteur À Arbre CreuxBouker Mohamed100% (1)
- Sec X 2001 Sic MPDokument9 SeitenSec X 2001 Sic MPAkram LyakobyNoch keine Bewertungen
- Klubprepa Extrait 6962Dokument7 SeitenKlubprepa Extrait 6962bhsbhs190% (1)
- MEF PoutreDokument9 SeitenMEF PoutreAbdelmajid HmNoch keine Bewertungen
- 12 1Dokument9 Seiten12 1Nadia SahliNoch keine Bewertungen
- Resultats de Simulation SimulinkDokument12 SeitenResultats de Simulation Simulinkhb1966Noch keine Bewertungen
- Chap 4 - Transmission - Liens Flexibles1 - 2Dokument21 SeitenChap 4 - Transmission - Liens Flexibles1 - 2AshrefAmriNoch keine Bewertungen
- TD-Poulie Embrayage Centrifuge PFDDokument5 SeitenTD-Poulie Embrayage Centrifuge PFDbhsbhs19Noch keine Bewertungen
- Td3 StatiqueDokument10 SeitenTd3 StatiqueYaye Anta DiopNoch keine Bewertungen
- TD 3 StatiqueDokument18 SeitenTD 3 Statiquefoufoua100% (1)
- TD 16 - Lois Entrée-Sortie en Position Et en VitesseDokument6 SeitenTD 16 - Lois Entrée-Sortie en Position Et en Vitessebhs channel0% (1)
- c09 TD Determiner Le Comportement Cinematique Et en Statique D Un Transmett Non Lineairev2Dokument20 Seitenc09 TD Determiner Le Comportement Cinematique Et en Statique D Un Transmett Non Lineairev2Salah Eddine Ait AissaNoch keine Bewertungen
- Volume 1 ExDokument36 SeitenVolume 1 ExjeanlucbuathierNoch keine Bewertungen
- TD Dynamique MP-PSI Nov 23 - RugosimètreDokument2 SeitenTD Dynamique MP-PSI Nov 23 - Rugosimètresalaheddinetalebhit3Noch keine Bewertungen
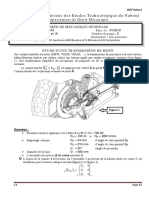
- Examen Mcanique Gnrale 1GM Iset Nabeul 2010 PDFDokument4 SeitenExamen Mcanique Gnrale 1GM Iset Nabeul 2010 PDFAbdallah JaoiadiNoch keine Bewertungen
- Rapport Dynamique de StructuresDokument16 SeitenRapport Dynamique de Structuresaharchaou houdaNoch keine Bewertungen
- MEC788 H20 - Devoir 1Dokument4 SeitenMEC788 H20 - Devoir 1myriamNoch keine Bewertungen
- A4181D55Dokument8 SeitenA4181D55bvghftNoch keine Bewertungen
- Cours 1 - Machines Volum-Pompes Volumetriques-Engrenages-Vis-29juillet2021Dokument90 SeitenCours 1 - Machines Volum-Pompes Volumetriques-Engrenages-Vis-29juillet2021Gloire Muteba100% (1)
- BourahlaDokument10 SeitenBourahlaMark ParaNoch keine Bewertungen
- Dossier Travail DemandéDokument8 SeitenDossier Travail DemandéGamin'Noch keine Bewertungen
- 1-Mise Sous Forme EtatDokument8 Seiten1-Mise Sous Forme EtatAllel BradleyNoch keine Bewertungen
- Examen de Conception Mecanique 2009 CorrigeDokument16 SeitenExamen de Conception Mecanique 2009 Corrigebhsbhs19Noch keine Bewertungen
- Sujet IG-2006Dokument8 SeitenSujet IG-2006Atou RamNoch keine Bewertungen
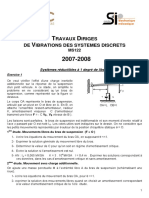
- TD de Vibrations Des Systemes Discrets + SolutionDokument33 SeitenTD de Vibrations Des Systemes Discrets + SolutionAfif Al Baalbaki50% (6)
- Exemples Patrick PaultreDokument41 SeitenExemples Patrick Paultremostefaoui mohammed100% (1)
- TP Auto MEEA 04 05 PDFDokument88 SeitenTP Auto MEEA 04 05 PDFYassine RabhiNoch keine Bewertungen
- CCP Sii MP 2018 SujetDokument20 SeitenCCP Sii MP 2018 SujetSaad KingNoch keine Bewertungen
- DS1 1Dokument11 SeitenDS1 1Wissal GuilloulNoch keine Bewertungen
- TD Asservissement m1 Spi-GmaDokument48 SeitenTD Asservissement m1 Spi-Gmamechernene_aek90370% (1)
- Exemple de Calcul Des Poutres Suivant Le BaelDokument10 SeitenExemple de Calcul Des Poutres Suivant Le BaelMario FeghaliNoch keine Bewertungen
- Exercices de Base - AsservissementDokument3 SeitenExercices de Base - AsservissementAzer Reza100% (3)
- Sec CCP 2004 Sic PSIDokument9 SeitenSec CCP 2004 Sic PSIsabaksousou111Noch keine Bewertungen
- TD Cinématique 111Dokument9 SeitenTD Cinématique 111Exode Christ GuielleNoch keine Bewertungen
- TD2 - Cine - 2017 18Dokument4 SeitenTD2 - Cine - 2017 18Wael YossraNoch keine Bewertungen
- 314 PDFDokument5 Seiten314 PDFSaidDibNoch keine Bewertungen
- Physique: Freinage Électromagnétique D'une Plaque MétalliqueDokument11 SeitenPhysique: Freinage Électromagnétique D'une Plaque MétalliqueMihnea GamanNoch keine Bewertungen
- Résumé MMC - SupAeroDokument6 SeitenRésumé MMC - SupAeroMahmoud AyadNoch keine Bewertungen
- Série D'ecercice 3,4Dokument5 SeitenSérie D'ecercice 3,4BRAHIMI TesnimNoch keine Bewertungen
- 9-Sahraoui 2Dokument5 Seiten9-Sahraoui 2yec200Noch keine Bewertungen
- CHAPITRE-3 Commande Scalaire Des Machines AsynchronesDokument12 SeitenCHAPITRE-3 Commande Scalaire Des Machines Asynchroneschersavan186% (28)
- MecaniqueDokument18 SeitenMecaniqueStephane Durel MbidaNoch keine Bewertungen
- Sujet Partie1 PDFDokument6 SeitenSujet Partie1 PDFDODOHICHAMNoch keine Bewertungen
- MecaniqueDokument11 SeitenMecaniqueDounia AlaouiNoch keine Bewertungen
- CM - Variateurs de Vitesse Mecanique2 PDFDokument49 SeitenCM - Variateurs de Vitesse Mecanique2 PDFOmar BenadirNoch keine Bewertungen
- Exercices d'intégrales de lignes, de surfaces et de volumesVon EverandExercices d'intégrales de lignes, de surfaces et de volumesNoch keine Bewertungen
- Équations différentielles: Les Grands Articles d'UniversalisVon EverandÉquations différentielles: Les Grands Articles d'UniversalisNoch keine Bewertungen
- Chapitre 2Dokument16 SeitenChapitre 2DODOHICHAM100% (1)
- Diagramme de Causes A EffetDokument5 SeitenDiagramme de Causes A EffetMoha Amazo100% (1)
- Master Gnie Industriel Et MaintenanceDokument62 SeitenMaster Gnie Industriel Et MaintenanceDODOHICHAM100% (3)
- Chapitre 1Dokument38 SeitenChapitre 1DODOHICHAM100% (2)
- Intro Analyse Vibrations Description Du CoursDokument1 SeiteIntro Analyse Vibrations Description Du CoursDODOHICHAMNoch keine Bewertungen
- 767 Dimensionnement Des Turbines PDFDokument30 Seiten767 Dimensionnement Des Turbines PDFDODOHICHAM100% (1)
- Reseaux Electriques-ExtraitDokument26 SeitenReseaux Electriques-ExtraitJamal Mahmoud100% (1)
- Memoire Master 2 Mecanique PDFDokument62 SeitenMemoire Master 2 Mecanique PDFDeghboudj Samir97% (31)
- Etude Turbine À Gaz (Maquette)Dokument4 SeitenEtude Turbine À Gaz (Maquette)Sofiane HalimiNoch keine Bewertungen
- TP Turbine VapeurDokument19 SeitenTP Turbine Vapeurمروان الشابي100% (2)
- Demarrage Des MoteursDokument59 SeitenDemarrage Des MoteursElMorsliJaouad50% (2)
- Gestion de Risque ProjetDokument22 SeitenGestion de Risque ProjetDODOHICHAM100% (1)
- Protection Des Installations ÉlectriquesDokument65 SeitenProtection Des Installations ÉlectriquesBESSEMYNoch keine Bewertungen
- Protection Des Installations ÉlectriquesDokument65 SeitenProtection Des Installations ÉlectriquesBESSEMYNoch keine Bewertungen
- Historique InjecteursDokument15 SeitenHistorique Injecteurslulu3232Noch keine Bewertungen
- M2 Siris 2012 PM Cours 20110920Dokument32 SeitenM2 Siris 2012 PM Cours 20110920Pape BassirouNoch keine Bewertungen
- CT 6 Generalites Sur Les Reseaux Electrique PDFDokument35 SeitenCT 6 Generalites Sur Les Reseaux Electrique PDFDODOHICHAM100% (1)
- Gestion de Risque ProjetDokument22 SeitenGestion de Risque ProjetDODOHICHAM100% (1)
- Gautier Controle Gestion ProjetsDokument40 SeitenGautier Controle Gestion ProjetsklibiNoch keine Bewertungen
- Gestion de ProjetDokument8 SeitenGestion de ProjetDODOHICHAMNoch keine Bewertungen
- Définir Une Politique de Maintenance Et Sa Stratégie de Mise en Œuvre de ResponsabilitésDokument16 SeitenDéfinir Une Politique de Maintenance Et Sa Stratégie de Mise en Œuvre de ResponsabilitésHyacinthe Daho100% (1)
- AtexDokument2 SeitenAtexDODOHICHAMNoch keine Bewertungen
- ProjetDokument52 SeitenProjetDODOHICHAM100% (2)
- Intro Gestion de Projet PDFDokument17 SeitenIntro Gestion de Projet PDFFadwa ZedNoch keine Bewertungen
- Normes Européennes D'émissionDokument4 SeitenNormes Européennes D'émissionDODOHICHAMNoch keine Bewertungen
- La Gestion Des RisquesDokument160 SeitenLa Gestion Des Risquesstudent dz83% (6)
- M2 Siris 2012 PM Cours 20110920Dokument32 SeitenM2 Siris 2012 PM Cours 20110920Pape BassirouNoch keine Bewertungen
- Vanne D Regulation 1Dokument5 SeitenVanne D Regulation 1DODOHICHAM100% (1)
- Gautier Controle Gestion ProjetsDokument40 SeitenGautier Controle Gestion ProjetsklibiNoch keine Bewertungen
- Boucles de RegulationDokument31 SeitenBoucles de Regulationmayan73100% (1)
- Programme Maths cm2Dokument1 SeiteProgramme Maths cm2gorguy100% (1)
- Transformateurs MonophasésDokument51 SeitenTransformateurs MonophasésDo OuNoch keine Bewertungen
- Laboratoire Biolab Bamako - Recherche GoogleDokument1 SeiteLaboratoire Biolab Bamako - Recherche GoogleAlou CoulibalyNoch keine Bewertungen
- Examen Corrigé Marketing - Questionnaire À Choix Multiple (QCM)Dokument7 SeitenExamen Corrigé Marketing - Questionnaire À Choix Multiple (QCM)Mar IemNoch keine Bewertungen
- TP Controle Optimal PDFDokument29 SeitenTP Controle Optimal PDFHamza El-houariNoch keine Bewertungen
- Formation - PDF - Robotique - Mécatronique PDFDokument9 SeitenFormation - PDF - Robotique - Mécatronique PDFHachicha SaberNoch keine Bewertungen
- DRAFT - Cours OCO - Part1Dokument32 SeitenDRAFT - Cours OCO - Part1Khennoune WissamNoch keine Bewertungen
- Examen Blanc Physique Chimie Bac DDokument4 SeitenExamen Blanc Physique Chimie Bac Dkouassi hermann ulrich koffi100% (1)
- EKIP360 PrestationsTarifications LFRDokument30 SeitenEKIP360 PrestationsTarifications LFRtouzanimahdiNoch keine Bewertungen
- Laddition Des Nombres Entiers CM2Dokument8 SeitenLaddition Des Nombres Entiers CM2chantal.aboujaoudehNoch keine Bewertungen
- RIB CopieDokument1 SeiteRIB CopieAbdoulaye CisséNoch keine Bewertungen
- QP1C General 1 PDFDokument5 SeitenQP1C General 1 PDFSamson KlouganNoch keine Bewertungen
- Chapitre 3 Ressources Réserves PlanificationDokument10 SeitenChapitre 3 Ressources Réserves PlanificationAdlaneNoch keine Bewertungen
- Corrige Serie5Dokument4 SeitenCorrige Serie5Chef FatimaNoch keine Bewertungen
- Brochure Nissan Urvan N350 15 PlacesDokument14 SeitenBrochure Nissan Urvan N350 15 PlaceskoneNoch keine Bewertungen
- Les Approches Managériales Basées Sur Les Parties PrenantesDokument4 SeitenLes Approches Managériales Basées Sur Les Parties PrenantesNohaila BencherquiNoch keine Bewertungen
- Les Corriges Essai District Kanel Jan 2024 - 061004Dokument8 SeitenLes Corriges Essai District Kanel Jan 2024 - 061004souleymanehousnaNoch keine Bewertungen
- World of Warcraft - Wrath of The Lich King - Arthas, My SonDokument4 SeitenWorld of Warcraft - Wrath of The Lich King - Arthas, My SonAdrian Angel LagrecaNoch keine Bewertungen
- ContexteDokument2 SeitenContextehibaouafi502Noch keine Bewertungen
- Manuel C2Dokument140 SeitenManuel C2Daniel AndriamananaNoch keine Bewertungen
- ProjetDokument4 SeitenProjetEya AwadiNoch keine Bewertungen
- CH1 (Introduction Au SI) PDFDokument17 SeitenCH1 (Introduction Au SI) PDFEL OUAZZANI PRINTNoch keine Bewertungen
- Cevap AnahtarıDokument1 SeiteCevap AnahtarıVeliNoch keine Bewertungen
- Biochimie 08 - Réplication Et Réparation Des Erreurs AssociéesDokument14 SeitenBiochimie 08 - Réplication Et Réparation Des Erreurs AssociéesNathan CohenNoch keine Bewertungen
- Método de Violino - CajatiDokument41 SeitenMétodo de Violino - CajatiWalmir PaiãoNoch keine Bewertungen
- 1 - Cours2 Hydraulique Et Pneumatique (2éme Année Électromécanique)Dokument16 Seiten1 - Cours2 Hydraulique Et Pneumatique (2éme Année Électromécanique)Mohamed Hechmi JERIDINoch keine Bewertungen
- 2M120 TD 2016 ch1 Codes CorrecteursDokument2 Seiten2M120 TD 2016 ch1 Codes CorrecteurskokiNoch keine Bewertungen
- Phrases À Remettre Dans L'ordreDokument9 SeitenPhrases À Remettre Dans L'ordreSylvie DinisNoch keine Bewertungen
- 5-Focales-Episode-2-Planification Et RégulationDokument42 Seiten5-Focales-Episode-2-Planification Et RégulationTaffyd MaertinsNoch keine Bewertungen
- Exercice 3Dokument1 SeiteExercice 3test lili100% (1)