Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Business Math - GuideDokument10 SeitenBusiness Math - GuideAva Barrameda67% (6)
- Combinaciones y PermutacionesDokument19 SeitenCombinaciones y PermutacionesConservación EnergyNoch keine Bewertungen
- HW4 SolutionsDokument11 SeitenHW4 Solutionsglttcgamer100% (2)
- Notes-Full-Set-Slides Stock Market PDFDokument185 SeitenNotes-Full-Set-Slides Stock Market PDFbijayrNoch keine Bewertungen
- Module 5 Raeesa D-17230Dokument21 SeitenModule 5 Raeesa D-17230Raeesa ShoaibNoch keine Bewertungen
- 51W 10540 1Dokument16 Seiten51W 10540 1Mitrofan AnduNoch keine Bewertungen
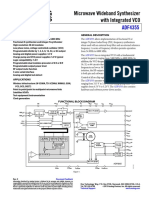
- ADF4355 54-6800 MHZ Microwave Wideband Synthesizer With Integrated VCODokument35 SeitenADF4355 54-6800 MHZ Microwave Wideband Synthesizer With Integrated VCOagmnm1962Noch keine Bewertungen
- A Compact Ultra-Wideband Power Divider With High Isolation 3.1-10.6 GHZDokument2 SeitenA Compact Ultra-Wideband Power Divider With High Isolation 3.1-10.6 GHZagmnm1962Noch keine Bewertungen
- 200watt Active Load UnitDokument14 Seiten200watt Active Load Unitagmnm1962Noch keine Bewertungen
- Scr's & Triacs Cross ReferenceDokument11 SeitenScr's & Triacs Cross Referenceagmnm1962Noch keine Bewertungen
- Sp431 High Voltage Adjustable Precision Shunt RegulatorsDokument11 SeitenSp431 High Voltage Adjustable Precision Shunt Regulatorsagmnm1962Noch keine Bewertungen
- Data Sheet: UHF Push-Pull Power MOS TransistorDokument15 SeitenData Sheet: UHF Push-Pull Power MOS Transistoragmnm1962Noch keine Bewertungen
- A Review of Implantable Antennas For Wireless Biomedical DevicesDokument11 SeitenA Review of Implantable Antennas For Wireless Biomedical Devicesagmnm1962Noch keine Bewertungen
- LXA-7500 Series X-Band Low Noise AmplifiersDokument4 SeitenLXA-7500 Series X-Band Low Noise Amplifiersagmnm1962Noch keine Bewertungen
- Variable High Voltage BJT Regulator User ManualDokument7 SeitenVariable High Voltage BJT Regulator User Manualagmnm1962Noch keine Bewertungen
- (Leslie Green) RF-Inductor Modeling For The 21st CDokument5 Seiten(Leslie Green) RF-Inductor Modeling For The 21st CBeeresha R SNoch keine Bewertungen
- A New Calculation For Designing Multilayer Planar Spiral InductorsDokument4 SeitenA New Calculation For Designing Multilayer Planar Spiral Inductorsagmnm1962Noch keine Bewertungen
- A Compact Dual-Band Dual-Polarized Patch AntennaDokument7 SeitenA Compact Dual-Band Dual-Polarized Patch Antennaagmnm19620% (1)
- Driven Right Leg Circuit DesignDokument5 SeitenDriven Right Leg Circuit Designagmnm1962Noch keine Bewertungen
- LT1167 Instr AmpDokument20 SeitenLT1167 Instr Ampagmnm1962Noch keine Bewertungen
- Bio Amps NotesDokument9 SeitenBio Amps Notesagmnm1962Noch keine Bewertungen
- Chapter 3: Basic of Applied Mechanical MeasurementDokument112 SeitenChapter 3: Basic of Applied Mechanical MeasurementSajid ShaikhNoch keine Bewertungen
- Jalali@mshdiua - Ac.ir Jalali - Mshdiau.ac - Ir: Data MiningDokument50 SeitenJalali@mshdiua - Ac.ir Jalali - Mshdiau.ac - Ir: Data MiningMostafa HeidaryNoch keine Bewertungen
- A1 F16 SolutionsDokument9 SeitenA1 F16 SolutionsAmjad MemonNoch keine Bewertungen
- Electrical Signal and Syatem BeginnerDokument87 SeitenElectrical Signal and Syatem Beginnerজীবন আহমেদNoch keine Bewertungen
- Counting Assessment: Learn To Solve This Type of Problems, Not Just This Problem!Dokument4 SeitenCounting Assessment: Learn To Solve This Type of Problems, Not Just This Problem!Kautilya SharmaNoch keine Bewertungen
- Fourier Transform of Discrete Time Signals: Spring 2014Dokument5 SeitenFourier Transform of Discrete Time Signals: Spring 2014Abdul RehmanNoch keine Bewertungen
- Math - Module 1Dokument7 SeitenMath - Module 1Carlos PadillaNoch keine Bewertungen
- TP36 Geopier Vs SC Performance Dr. David WhiteDokument8 SeitenTP36 Geopier Vs SC Performance Dr. David WhiteToby BobyNoch keine Bewertungen
- Control and Optimization of A Multiple Effect EvaporatorDokument6 SeitenControl and Optimization of A Multiple Effect EvaporatorthanhndbNoch keine Bewertungen
- Quimbo, Sharmaine M. (MMW-Assignment #4)Dokument7 SeitenQuimbo, Sharmaine M. (MMW-Assignment #4)Sharmaine QuimboNoch keine Bewertungen
- 05 Modeling Dynamic and Static Behavior of Chemical ProcessesDokument47 Seiten05 Modeling Dynamic and Static Behavior of Chemical ProcessesAsrul SaniNoch keine Bewertungen
- Stata ExcelDokument44 SeitenStata ExcelchompoonootNoch keine Bewertungen
- SimulatedTrain Energy Consumption STECDokument20 SeitenSimulatedTrain Energy Consumption STECCarlos Redondo BenitezNoch keine Bewertungen
- Final Project Part2Dokument3 SeitenFinal Project Part2api-305255197Noch keine Bewertungen
- A Phenomenological Analysis of ObservationDokument19 SeitenA Phenomenological Analysis of ObservationGabriela De GanteNoch keine Bewertungen
- Adc 1 PDFDokument2 SeitenAdc 1 PDFSalmanNoch keine Bewertungen
- Objects Tab For Power Systems ModelingDokument8 SeitenObjects Tab For Power Systems ModelingVHLIMEUNoch keine Bewertungen
- MA202 Probability Distributions, Transforms and Numerical MethodsDokument3 SeitenMA202 Probability Distributions, Transforms and Numerical MethodsSáçhìñDêvNoch keine Bewertungen
- 12.12.4 Bolt Pre-LoadDokument25 Seiten12.12.4 Bolt Pre-Loadjingyong123Noch keine Bewertungen
- Mixing-A Detailed Look at The Factors That Influence Mix UniformityDokument19 SeitenMixing-A Detailed Look at The Factors That Influence Mix UniformityreyesdavidNoch keine Bewertungen
- 0.6 Out of 0.6 Points: Distribution As 68% Is Typically Used For Normal DistributionDokument5 Seiten0.6 Out of 0.6 Points: Distribution As 68% Is Typically Used For Normal Distribution高晴汝Noch keine Bewertungen
- Syllogism Made EasyDokument20 SeitenSyllogism Made EasympvetriveluNoch keine Bewertungen
- TF: Textile Engineering and Fibre Science: Read The Following Instructions CarefullyDokument12 SeitenTF: Textile Engineering and Fibre Science: Read The Following Instructions CarefullyChandra Deep MishraNoch keine Bewertungen
- 15 Famous Greek Mathematicians and Their ContributionsDokument16 Seiten15 Famous Greek Mathematicians and Their ContributionsMallari MarjorieNoch keine Bewertungen
- GUIA de BibliometrixDokument62 SeitenGUIA de BibliometrixrobinsonortizsierraNoch keine Bewertungen