Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Lazard Levelized Cost of Storage v20Dokument46 SeitenLazard Levelized Cost of Storage v20macNoch keine Bewertungen
- UX-driven Heuristics For Every Designer: OutlineDokument7 SeitenUX-driven Heuristics For Every Designer: OutlinemuhammadsabirinhadisNoch keine Bewertungen
- 310 311 320 321 Toilet Warranty Codes PDFDokument11 Seiten310 311 320 321 Toilet Warranty Codes PDFTerri MartinNoch keine Bewertungen
- Hortee OromooDokument48 SeitenHortee OromooAsnaafii BantiiNoch keine Bewertungen
- WRhine-Main-Danube CanalDokument6 SeitenWRhine-Main-Danube CanalbillNoch keine Bewertungen
- Board Resolution On Assigning Signatories in The Voucher ProgramDokument2 SeitenBoard Resolution On Assigning Signatories in The Voucher ProgramavinmanzanoNoch keine Bewertungen
- RHEL 9.0 - Configuring Device Mapper MultipathDokument59 SeitenRHEL 9.0 - Configuring Device Mapper MultipathITTeamNoch keine Bewertungen
- TSAR-1 Reverb Quick GuideDokument1 SeiteTSAR-1 Reverb Quick GuidedraenkNoch keine Bewertungen
- Ecological Consideration of Site AnalysisDokument20 SeitenEcological Consideration of Site AnalysisAUST BNoch keine Bewertungen
- Smartpilot s1 s1g Service ManualDokument30 SeitenSmartpilot s1 s1g Service Manualmalte winbaldNoch keine Bewertungen
- GFN Cired PaperDokument8 SeitenGFN Cired PaperSukant BhattacharyaNoch keine Bewertungen
- National Industrial Policy 2010 (Bangla)Dokument46 SeitenNational Industrial Policy 2010 (Bangla)Md.Abdulla All Shafi0% (1)
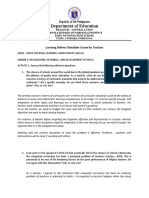
- Department of Education: Republic of The PhilippinesDokument6 SeitenDepartment of Education: Republic of The PhilippinesLalaine QuitoNoch keine Bewertungen
- The Eclectic (OLI) Paradigm of International Production - Past, Present and FutureDokument19 SeitenThe Eclectic (OLI) Paradigm of International Production - Past, Present and FutureJomit C PNoch keine Bewertungen
- 2022+ACCF+111+Class+test+2 Moderated+versionDokument8 Seiten2022+ACCF+111+Class+test+2 Moderated+versionLucas LuluNoch keine Bewertungen
- IOQC2021 PartII Questions enDokument13 SeitenIOQC2021 PartII Questions enDhamodharan SrinivasanNoch keine Bewertungen
- Building A Vacuum Forming TableDokument9 SeitenBuilding A Vacuum Forming TableWil NelsonNoch keine Bewertungen
- Lecture 3: Bode Plots: Prof. NiknejadDokument26 SeitenLecture 3: Bode Plots: Prof. Niknejadselaroth168Noch keine Bewertungen
- Pipe Support Reference 8-29-14Dokument108 SeitenPipe Support Reference 8-29-14HITESHNoch keine Bewertungen
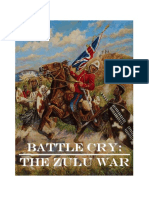
- Battle Cry Zulu WarDokument4 SeitenBattle Cry Zulu WarPat RisNoch keine Bewertungen
- ExamDokument12 SeitenExamAidar MukushevNoch keine Bewertungen
- Vững vàng nền tảng, Khai sáng tương lai: Trang - 1Dokument11 SeitenVững vàng nền tảng, Khai sáng tương lai: Trang - 1An AnNoch keine Bewertungen
- ASWP Manual - Section 1 - IntroductionDokument17 SeitenASWP Manual - Section 1 - Introductionjmvm56Noch keine Bewertungen
- Concept PaperDokument4 SeitenConcept Paperjanet a. silosNoch keine Bewertungen
- Assignment ProblemDokument3 SeitenAssignment ProblemPrakash KumarNoch keine Bewertungen
- Writing Capstone Research Project For Senior High School A Modified Guide ManualDokument9 SeitenWriting Capstone Research Project For Senior High School A Modified Guide ManualIOER International Multidisciplinary Research Journal ( IIMRJ)Noch keine Bewertungen
- 10 TazmahalDokument12 Seiten10 TazmahalSifat E Noor SahibaNoch keine Bewertungen
- ToobaKhawar 6733 VPL Lab Sat 12 3 All TasksDokument38 SeitenToobaKhawar 6733 VPL Lab Sat 12 3 All TasksTooba KhawarNoch keine Bewertungen
- Prishusingh Blogspot Com 2024 03 Digital-Marketing-Course HTMLDokument12 SeitenPrishusingh Blogspot Com 2024 03 Digital-Marketing-Course HTMLsudharaj86038Noch keine Bewertungen
- Zielinski AnArcheology For AnArchivesDokument10 SeitenZielinski AnArcheology For AnArchivesPEDRO JOSENoch keine Bewertungen