Das könnte Ihnen auch gefallen
- Density Based Traffic Control System.: Electrical EngineeringDokument41 SeitenDensity Based Traffic Control System.: Electrical Engineeringvijay shindeNoch keine Bewertungen
- PLC Based Home Automation PDFDokument95 SeitenPLC Based Home Automation PDFRameshwar TalwarNoch keine Bewertungen
- BRAKE FAILURE INDICATOR CIRCUIT GUIDEDokument28 SeitenBRAKE FAILURE INDICATOR CIRCUIT GUIDErishika71% (7)
- Arduino Based Home Automation System Using Bluetooth Through An Android Mobile PDFDokument72 SeitenArduino Based Home Automation System Using Bluetooth Through An Android Mobile PDFsalmanNoch keine Bewertungen
- DEM Microproject EE 4IDokument10 SeitenDEM Microproject EE 4IAvinash GajbhiyeNoch keine Bewertungen
- PLC Based Industrial Sorting Thesis ReportDokument63 SeitenPLC Based Industrial Sorting Thesis ReportVishal MeghwarNoch keine Bewertungen
- Project ReportDokument65 SeitenProject ReportMusical world100% (1)
- Prepare A Report On Use of Mechatronics Elements in LiftDokument6 SeitenPrepare A Report On Use of Mechatronics Elements in LiftRtr. Devansh M.Noch keine Bewertungen
- A Project Report On Car Safety SystemDokument31 SeitenA Project Report On Car Safety SystemNishant MoreNoch keine Bewertungen
- Major Project ReportDokument46 SeitenMajor Project ReportJayaN TNoch keine Bewertungen
- Nerve Sensitivity Alert System For Comatose Patients: Submitted byDokument83 SeitenNerve Sensitivity Alert System For Comatose Patients: Submitted byGaurav SinghNoch keine Bewertungen
- Coin Based Water Controlling SystemDokument34 SeitenCoin Based Water Controlling SystemSanthosh Guduru75% (4)
- Microcontroller Based Digital Code Lock REPORTDokument50 SeitenMicrocontroller Based Digital Code Lock REPORTMithun Kumar MNoch keine Bewertungen
- Digital-Fan-Regulator ProjectDokument31 SeitenDigital-Fan-Regulator ProjectSRIDHAR C RNoch keine Bewertungen
- Fault Detection in Transmission Line Using GSM Technology 4301,4304,4313Dokument67 SeitenFault Detection in Transmission Line Using GSM Technology 4301,4304,4313naveen gNoch keine Bewertungen
- Accident Detection and Alert SystemDokument13 SeitenAccident Detection and Alert Systemtayyaba riazNoch keine Bewertungen
- Automatic Side Stand SystemDokument25 SeitenAutomatic Side Stand SystemAravindh Kumar33% (3)
- Dual Axis Solar System ReportDokument28 SeitenDual Axis Solar System ReportdnyandevNoch keine Bewertungen
- Build Circuit To Blink LEDs in Different Patterns Microcontroller Programming ProjectDokument13 SeitenBuild Circuit To Blink LEDs in Different Patterns Microcontroller Programming ProjectChaitanya YengeNoch keine Bewertungen
- Fabrication of Automatic Side Stand Braking Mechanism For Two WheelerDokument37 SeitenFabrication of Automatic Side Stand Braking Mechanism For Two Wheelergnana muruganNoch keine Bewertungen
- Obstacle Avoiding Robot ReportDokument32 SeitenObstacle Avoiding Robot ReportBroNoch keine Bewertungen
- About Bharat ForgeDokument19 SeitenAbout Bharat ForgeDebarpanNag100% (1)
- 10.agriculture Field Motor Control System Using GSMDokument64 Seiten10.agriculture Field Motor Control System Using GSManil kumarNoch keine Bewertungen
- Automatic Side Stand Retreiving SystemDokument49 SeitenAutomatic Side Stand Retreiving SystemEtgsNoch keine Bewertungen
- Major Project Report On War Field Spy RobotDokument52 SeitenMajor Project Report On War Field Spy RobotBarun Dhiman75% (8)
- Design and Fabrication of a Solar Tracking SystemDokument56 SeitenDesign and Fabrication of a Solar Tracking Systemvijay AmirtharajNoch keine Bewertungen
- Metal detector circuit micro-project reportDokument34 SeitenMetal detector circuit micro-project reportOm PawarNoch keine Bewertungen
- Solar CultivatorDokument41 SeitenSolar CultivatorAnonymous ytZsBOVNoch keine Bewertungen
- A Summer Field Training ReportDokument17 SeitenA Summer Field Training ReportAshishJaat33% (3)
- Smart Blind Stick Using Proteus: Electrical EngineeringDokument44 SeitenSmart Blind Stick Using Proteus: Electrical EngineeringRudra PrasadNoch keine Bewertungen
- BE Major Project Format CSEDokument8 SeitenBE Major Project Format CSEbipin12960% (1)
- 1.protection of Busbar Distribution From Over LoadDokument4 Seiten1.protection of Busbar Distribution From Over LoadPooja BanNoch keine Bewertungen
- Main Project PROJECTDokument84 SeitenMain Project PROJECTMeraj AlamNoch keine Bewertungen
- Report (Vaishnavi)Dokument46 SeitenReport (Vaishnavi)Vaishnavi BNoch keine Bewertungen
- Med - Batch 2 - Thesis FinalDokument68 SeitenMed - Batch 2 - Thesis FinalKRISHNA VAMSHINoch keine Bewertungen
- Transmission Line Monitoring Under 40Dokument3 SeitenTransmission Line Monitoring Under 40dileeppatra100% (2)
- Faheem Riyaz Shaikh 3309 RAC MicroprojectDokument18 SeitenFaheem Riyaz Shaikh 3309 RAC MicroprojectFaheem Shaikh100% (1)
- Facial Expression Recognition in E-LearningDokument63 SeitenFacial Expression Recognition in E-LearningPathivadaSantoshNaiduNoch keine Bewertungen
- Automatic Vacuum Cleaner PDFDokument29 SeitenAutomatic Vacuum Cleaner PDFproteuscarrillusNoch keine Bewertungen
- Mini Project ReportDokument55 SeitenMini Project ReportAnanthu vijayanNoch keine Bewertungen
- Automatic Dam Gate Control Using SensorsDokument20 SeitenAutomatic Dam Gate Control Using SensorsRam Reddy100% (6)
- SMS Based Automatic Two Wheeler Locking SystemDokument42 SeitenSMS Based Automatic Two Wheeler Locking SystemmboomiNoch keine Bewertungen
- Ret MicroprojectDokument12 SeitenRet MicroprojectArvind YadavNoch keine Bewertungen
- Solenoid Valve - How They Work: Normally Open Normally ClosedDokument7 SeitenSolenoid Valve - How They Work: Normally Open Normally Closedmuhammad aliNoch keine Bewertungen
- Micro Project: Subject:-Emerging Trend in Mechanical EngineeringDokument18 SeitenMicro Project: Subject:-Emerging Trend in Mechanical EngineeringVaibhav PatilNoch keine Bewertungen
- Smart Irrigation Mini Project ReportDokument11 SeitenSmart Irrigation Mini Project ReportAlone Walker100% (1)
- HYDRAULIC Bush Bearing Puller 2011 Ac FinalDokument47 SeitenHYDRAULIC Bush Bearing Puller 2011 Ac FinalSelva Ganapathy50% (2)
- Hybrid Vehicle ReportDokument64 SeitenHybrid Vehicle ReportDeepSharanNoch keine Bewertungen
- Flywheel Energy Storage System: Bachelor of TechnologyDokument13 SeitenFlywheel Energy Storage System: Bachelor of Technologymadhu kotlaNoch keine Bewertungen
- Final Mini Project ReportDokument29 SeitenFinal Mini Project ReportumaNoch keine Bewertungen
- Automatic Bike Stand ReportDokument50 SeitenAutomatic Bike Stand ReportSagar Tikone50% (2)
- Sand Slinger MC Pneumatic 2016 VeltechDokument47 SeitenSand Slinger MC Pneumatic 2016 VeltechChockalingam AthilingamNoch keine Bewertungen
- Monika Project ReportDokument59 SeitenMonika Project ReportMonikamorya100% (1)
- DC StarterDokument20 SeitenDC StarterGokul ChandrasekaranNoch keine Bewertungen
- Plant Layout Parameters On The Risk of PulsationsDokument12 SeitenPlant Layout Parameters On The Risk of PulsationsIbrahim HarrakNoch keine Bewertungen
- Design and Analysis of Lifting Mechanism in Water Dams Using Composite MaterialsDokument9 SeitenDesign and Analysis of Lifting Mechanism in Water Dams Using Composite MaterialsShahbaz Hassan MS Student MechanicalNoch keine Bewertungen
- Training Report Submission: To Icdeol HP UniversityDokument35 SeitenTraining Report Submission: To Icdeol HP UniversityKshitij ThakurNoch keine Bewertungen
- Chapter 5Dokument48 SeitenChapter 5farahazuraNoch keine Bewertungen
- Water Resources Engineering Chapter on Dams and SpillwaysDokument48 SeitenWater Resources Engineering Chapter on Dams and SpillwaysNur Farhana Ahmad FuadNoch keine Bewertungen
- Sewage Disposal Works: Their Design and ConstructionVon EverandSewage Disposal Works: Their Design and ConstructionNoch keine Bewertungen
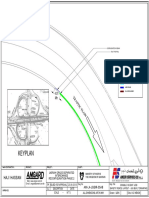
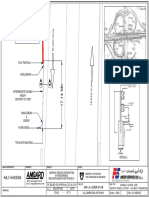
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- DWG 05Dokument1 SeiteDWG 05libin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- DWG 04Dokument1 SeiteDWG 04libin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- DWG 04Dokument1 SeiteDWG 04libin513Noch keine Bewertungen
- DWG 0aDokument1 SeiteDWG 0alibin513Noch keine Bewertungen
- Eamco DMJ RS SD 002Dokument1 SeiteEamco DMJ RS SD 002libin513Noch keine Bewertungen
- DWG 0aDokument1 SeiteDWG 0alibin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- DWG 05Dokument1 SeiteDWG 05libin513Noch keine Bewertungen
- Keyplan: Traffic FlowDokument9 SeitenKeyplan: Traffic Flowlibin513Noch keine Bewertungen
- DWG 05Dokument1 SeiteDWG 05libin513Noch keine Bewertungen
- DWG 01Dokument1 SeiteDWG 01libin513Noch keine Bewertungen
- Ornamentel Fence STD (Nass - Al Fateh Main Works)Dokument1 SeiteOrnamentel Fence STD (Nass - Al Fateh Main Works)libin513Noch keine Bewertungen
- Wire Rope Layout 01Dokument1 SeiteWire Rope Layout 01libin513Noch keine Bewertungen
- DWG 03Dokument1 SeiteDWG 03libin513Noch keine Bewertungen
- Pepwave Max Hd2 DatasheetDokument2 SeitenPepwave Max Hd2 DatasheetHendra AgustiaNoch keine Bewertungen
- VolvoDokument220 SeitenVolvoturbokolosabacNoch keine Bewertungen
- Borri UPS & Critical Power CatalogueDokument72 SeitenBorri UPS & Critical Power CatalogueNguyễn Anh DanhNoch keine Bewertungen
- Energy Harvesting Sources, Storage Devices and System Topologies For Environmental Wireless Sensor Networks - A ReviewDokument35 SeitenEnergy Harvesting Sources, Storage Devices and System Topologies For Environmental Wireless Sensor Networks - A ReviewimaculateNoch keine Bewertungen
- CNF CVDokument4 SeitenCNF CVJnz OlanNoch keine Bewertungen
- Validating The Integrity of Computing DevicesDokument239 SeitenValidating The Integrity of Computing DevicesNhat NguyenNoch keine Bewertungen
- On The Design Details of SS/PBCH, Signal Generation and PRACH in 5G-NRDokument21 SeitenOn The Design Details of SS/PBCH, Signal Generation and PRACH in 5G-NRSukshith ShettyNoch keine Bewertungen
- Procedure to Repair Samsung LCD/LED Panel without External Gate COFDokument70 SeitenProcedure to Repair Samsung LCD/LED Panel without External Gate COFDiego Correa100% (2)
- IDPSDokument12 SeitenIDPSمطيع برهومNoch keine Bewertungen
- 3G KPI Reference PDFDokument152 Seiten3G KPI Reference PDFAnonymous 1maCHWkTAKNoch keine Bewertungen
- Teldat SD Wan Features Description April 2018 180413Dokument35 SeitenTeldat SD Wan Features Description April 2018 180413casinaroNoch keine Bewertungen
- Notes On Jensen's InequalityDokument7 SeitenNotes On Jensen's InequalityJun WangNoch keine Bewertungen
- Advantages and DisadvantagesDokument4 SeitenAdvantages and Disadvantagesapi-460929148Noch keine Bewertungen
- FS1530C CNC Router Technical SpecsDokument7 SeitenFS1530C CNC Router Technical SpecsAutomotive AlbacaNoch keine Bewertungen
- CH 07Dokument40 SeitenCH 07Ambreen31Noch keine Bewertungen
- Service Manual: Compact Component SystemDokument32 SeitenService Manual: Compact Component SystemNestor CastilloNoch keine Bewertungen
- Farm Management Information SystemDokument45 SeitenFarm Management Information SystemDivya VkNoch keine Bewertungen
- Types of Computer NetworksDokument9 SeitenTypes of Computer Networksthet.htar.oo442Noch keine Bewertungen
- Purposive Communication: Module 7: Communication For Various PurposesDokument11 SeitenPurposive Communication: Module 7: Communication For Various PurposesKatherine Marie BerouNoch keine Bewertungen
- It DBMS RecDokument77 SeitenIt DBMS RecLokeshkumar Ramasamy100% (1)
- Amplitude Modulation Fundamental - Take Home Quiz 2Dokument3 SeitenAmplitude Modulation Fundamental - Take Home Quiz 2Janica Rheanne JapsayNoch keine Bewertungen
- 70-345 Designing and Deploying Microsoft Exchange Server 2016Dokument197 Seiten70-345 Designing and Deploying Microsoft Exchange Server 2016SilviuNoch keine Bewertungen
- Implement Oracle Configurator Functional FlowDokument28 SeitenImplement Oracle Configurator Functional FlowAntoineNoch keine Bewertungen
- Intel Xeon Processor E7-8800/4800/2800 Product Families: Datasheet Volume 2 of 2Dokument50 SeitenIntel Xeon Processor E7-8800/4800/2800 Product Families: Datasheet Volume 2 of 2JINU SHAJUNoch keine Bewertungen
- Chapter 2: What Is An iBOX?: Ibox Installation & Maintenance GuideDokument12 SeitenChapter 2: What Is An iBOX?: Ibox Installation & Maintenance GuideleosenthilNoch keine Bewertungen
- Re 1999 11Dokument100 SeitenRe 1999 11Enéas BaroneNoch keine Bewertungen
- Sigma linear motors direct drive technology overviewDokument26 SeitenSigma linear motors direct drive technology overviewMario StoyanovNoch keine Bewertungen
- Young 2003 - Enhancing Learning Outcomes - The Effects of Instructional Technology, Learning Styles, Instructional Methods and Studen BehaviorDokument14 SeitenYoung 2003 - Enhancing Learning Outcomes - The Effects of Instructional Technology, Learning Styles, Instructional Methods and Studen BehaviorkambudurNoch keine Bewertungen
- Product Di810Dokument4 SeitenProduct Di810rogeliobarNoch keine Bewertungen
- Models - Acdc.heating CircuitDokument24 SeitenModels - Acdc.heating Circuitvenalum90Noch keine Bewertungen