Das könnte Ihnen auch gefallen
- Anexo N4Dokument15 SeitenAnexo N4gmaNoch keine Bewertungen
- Artificial Nature: English SummaryDokument15 SeitenArtificial Nature: English SummarygmaNoch keine Bewertungen
- Cogeneration DivisionDokument49 SeitenCogeneration Divisiongma100% (1)
- P5 Box2D Physics Tutorial: Foreword: The Tutorial Is The Physics Chapter From Introduction To Programming WithDokument74 SeitenP5 Box2D Physics Tutorial: Foreword: The Tutorial Is The Physics Chapter From Introduction To Programming WithgmaNoch keine Bewertungen
- Eco Cities To Living MachinesDokument226 SeitenEco Cities To Living Machinesgma100% (2)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1091)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Ra3 PDFDokument10 SeitenRa3 PDFanilks3Noch keine Bewertungen
- r290 Air Cooled Water Chiller - General DescriptionDokument2 Seitenr290 Air Cooled Water Chiller - General DescriptionDaud Simon ANoch keine Bewertungen
- Allen Bradley SMC 150 - CatDokument2 SeitenAllen Bradley SMC 150 - Catjohn_jjNoch keine Bewertungen
- 545WKS 2 Building and Construction Provision of Facilities and SafetyDokument68 Seiten545WKS 2 Building and Construction Provision of Facilities and SafetyAlexNoch keine Bewertungen
- DRAWING 1 JKS OIL SHED1-ModelDokument1 SeiteDRAWING 1 JKS OIL SHED1-ModelAPS DESIGN INFRA PVT.LTD.Noch keine Bewertungen
- 0042-11 Injection Actuation Pressure Output FaultDokument1 Seite0042-11 Injection Actuation Pressure Output FaultHamilton Miranda100% (3)
- Pro-Ject Primary ManualDokument8 SeitenPro-Ject Primary ManualJuan PerezNoch keine Bewertungen
- Manual de Operación OPTIMASS6400 PDFDokument64 SeitenManual de Operación OPTIMASS6400 PDFJulio Cesar Martinez BarraganNoch keine Bewertungen
- Diesel Generator Fuel Consumption Chart in LitresDokument1 SeiteDiesel Generator Fuel Consumption Chart in LitresAnkur mittalNoch keine Bewertungen
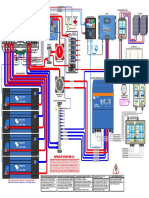
- Lynx Ion BMS Example With Quattro 8KW 24V 230VDokument1 SeiteLynx Ion BMS Example With Quattro 8KW 24V 230VAlba Car MarNoch keine Bewertungen
- ARCHITECTURAL PLANS Option 1Dokument8 SeitenARCHITECTURAL PLANS Option 1Ma. Jeanne Elyza MuñizNoch keine Bewertungen
- Eta CurvesDokument38 SeitenEta CurvesGino Chavez ValenciaNoch keine Bewertungen
- Heat Transfer Design Methods by John MC Ketta PDFDokument607 SeitenHeat Transfer Design Methods by John MC Ketta PDFAlberto LazzarettiNoch keine Bewertungen
- DIY Non-Contact Voltage Detector: InstructablesDokument5 SeitenDIY Non-Contact Voltage Detector: InstructablesSatheesan PNoch keine Bewertungen
- Breaking The Ice: De-Icing Power Transmission Lines With High-Frequency, High-Voltage ExcitationDokument7 SeitenBreaking The Ice: De-Icing Power Transmission Lines With High-Frequency, High-Voltage Excitationkunchamspandana_4871Noch keine Bewertungen
- Tutorial Module 4Dokument9 SeitenTutorial Module 4Neupane Er KrishnaNoch keine Bewertungen
- Engineering Department Sop HandbookDokument254 SeitenEngineering Department Sop Handbookshankar kharatNoch keine Bewertungen
- ASTM F899-09 Íâ¿ÆÆ÷Ð ÓÃ Ä Ðâ Ö °ô ĺÍË¿ ÄDokument6 SeitenASTM F899-09 Íâ¿ÆÆ÷Ð ÓÃ Ä Ðâ Ö °ô ĺÍË¿ ÄNez OlivarNoch keine Bewertungen
- Test Case For Login PageDokument8 SeitenTest Case For Login PagePavan KumarNoch keine Bewertungen
- ( ) Switchgear and Controlling EquipmentDokument7 Seiten( ) Switchgear and Controlling EquipmentD BasavarajaNoch keine Bewertungen
- About KirloskarvadiDokument4 SeitenAbout KirloskarvadiKamlesh DeorukhkarNoch keine Bewertungen
- 1041-Main Building Parapet Wall Conc. WorksDokument3 Seiten1041-Main Building Parapet Wall Conc. WorksErol VasquezNoch keine Bewertungen
- Soil in Treatment NepalDokument12 SeitenSoil in Treatment NepalDesktop NepalNoch keine Bewertungen
- The Kenya Ceramic Jiko (PDFDrive)Dokument109 SeitenThe Kenya Ceramic Jiko (PDFDrive)D M100% (2)
- AllisonDokument9 SeitenAllisonDaniel Castillo Peña100% (6)
- Outcomes For Microprocessor and Microcontroller 2017 NewDokument3 SeitenOutcomes For Microprocessor and Microcontroller 2017 Newroyal1979Noch keine Bewertungen
- Lab ReportDokument7 SeitenLab ReportChris CampbellNoch keine Bewertungen
- Topographic Map of AcworthDokument1 SeiteTopographic Map of AcworthHistoricalMapsNoch keine Bewertungen
- 2.heat-Exchangers From Ch6 - Mihir's HandbookDokument12 Seiten2.heat-Exchangers From Ch6 - Mihir's HandbookThế Quang LêNoch keine Bewertungen
- 20 Interesting Facts About ComputersDokument1 Seite20 Interesting Facts About ComputersramanagopalNoch keine Bewertungen