Das könnte Ihnen auch gefallen
- Lesson 5 - Transistor Behaviour and ModelsDokument40 SeitenLesson 5 - Transistor Behaviour and ModelsS.m. FerdousNoch keine Bewertungen
- Lesson 2 - Simple Diode Models and Circuits - (Presentation - Slides)Dokument29 SeitenLesson 2 - Simple Diode Models and Circuits - (Presentation - Slides)S.m. FerdousNoch keine Bewertungen
- Lesson 4 - LEDs and PhotodiodesDokument17 SeitenLesson 4 - LEDs and PhotodiodesS.m. FerdousNoch keine Bewertungen
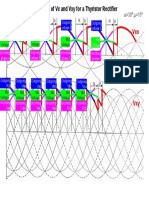
- Thyristor Commutation Animation VxVxyDokument1 SeiteThyristor Commutation Animation VxVxyS.m. FerdousNoch keine Bewertungen
- ENG207 Operational Amplifiers Principles of Electronic InstrumentationDokument38 SeitenENG207 Operational Amplifiers Principles of Electronic InstrumentationS.m. FerdousNoch keine Bewertungen
- Zener Diode Voltage Regulator Circuit DesignDokument32 SeitenZener Diode Voltage Regulator Circuit DesignS.m. FerdousNoch keine Bewertungen
- Lesson 1 - Introduction and Diode ModelsDokument45 SeitenLesson 1 - Introduction and Diode ModelsS.m. FerdousNoch keine Bewertungen
- AIPDokument19 SeitenAIPS.m. FerdousNoch keine Bewertungen
- Comparative Study Between Series Resonant Converter and Parallel Resonant ConverterDokument23 SeitenComparative Study Between Series Resonant Converter and Parallel Resonant ConverterS.m. FerdousNoch keine Bewertungen
- Recent Dev in Power Electronic - FinalDokument51 SeitenRecent Dev in Power Electronic - FinalS.m. FerdousNoch keine Bewertungen
- EmbeddedLab v1.60 RemoteDocsDokument197 SeitenEmbeddedLab v1.60 RemoteDocsAshok ObuliNoch keine Bewertungen
- The Status of Li-Ion Battery Development For LEV ApplicationsDokument4 SeitenThe Status of Li-Ion Battery Development For LEV ApplicationsS.m. FerdousNoch keine Bewertungen
- Accion Control y Aplicacion de Motores ElectricosDokument358 SeitenAccion Control y Aplicacion de Motores Electricosnikoll1953Noch keine Bewertungen
- Recent Development in Power Electronic - ContentDokument2 SeitenRecent Development in Power Electronic - ContentS.m. FerdousNoch keine Bewertungen
- Technical Implications of Electric Vehicle (EV) Integration For The Grid, Bulk and Local DistributionDokument16 SeitenTechnical Implications of Electric Vehicle (EV) Integration For The Grid, Bulk and Local DistributionS.m. FerdousNoch keine Bewertungen
- Analog MultipliersDokument5 SeitenAnalog MultipliersS.m. FerdousNoch keine Bewertungen
- Busbar: Energy Storing and Recovering in Power Systems and Hev and EvDokument12 SeitenBusbar: Energy Storing and Recovering in Power Systems and Hev and EvS.m. FerdousNoch keine Bewertungen
- FlywheelDokument8 SeitenFlywheelS.m. FerdousNoch keine Bewertungen
- Chap 1Dokument21 SeitenChap 1S.m. FerdousNoch keine Bewertungen
- BatteryDokument9 SeitenBatteryS.m. FerdousNoch keine Bewertungen
- 3.2.3 Flux-Weakening Control Design and Analysis: Semiaxis Because of IDokument13 Seiten3.2.3 Flux-Weakening Control Design and Analysis: Semiaxis Because of IPierumberto PampaninNoch keine Bewertungen
- Cover PagesDokument12 SeitenCover PagesS.m. FerdousNoch keine Bewertungen
- Checklist For Chapter 6: Synchronous MotorsDokument2 SeitenChecklist For Chapter 6: Synchronous MotorsS.m. FerdousNoch keine Bewertungen
- Normallised Parameters: The Parallel Resonant Converter: AnalysisDokument12 SeitenNormallised Parameters: The Parallel Resonant Converter: AnalysisS.m. FerdousNoch keine Bewertungen
- Current Sources BJTDokument15 SeitenCurrent Sources BJTS.m. FerdousNoch keine Bewertungen
- Chapter 7 ChecklistDokument2 SeitenChapter 7 ChecklistS.m. FerdousNoch keine Bewertungen
- Checklist For Chapter 1: Introduction To Machinery PrinciplesDokument1 SeiteChecklist For Chapter 1: Introduction To Machinery PrinciplesS.m. FerdousNoch keine Bewertungen
- Chap 2Dokument11 SeitenChap 2S.m. FerdousNoch keine Bewertungen
- Quote For MR - Shuvo, American International University BangladeshDokument3 SeitenQuote For MR - Shuvo, American International University BangladeshS.m. FerdousNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Introduction To South Korean History, Cultures, Traditions, & BeliefsDokument8 SeitenIntroduction To South Korean History, Cultures, Traditions, & BeliefsKatriceNoch keine Bewertungen
- Simple Present 60991Dokument17 SeitenSimple Present 60991Ketua EE 2021 AndrianoNoch keine Bewertungen
- Motor Operated ValveDokument6 SeitenMotor Operated ValveYosses Sang NahkodaNoch keine Bewertungen
- P-H Agua PDFDokument1 SeiteP-H Agua PDFSarah B. LopesNoch keine Bewertungen
- Isaac Asimov - "Nightfall"Dokument20 SeitenIsaac Asimov - "Nightfall"Aditya Sharma100% (1)
- Mumbai Tourist Attractions.Dokument2 SeitenMumbai Tourist Attractions.Guru SanNoch keine Bewertungen
- Canberra As A Planned CityDokument12 SeitenCanberra As A Planned Citybrumbies15100% (1)
- Assignment - Stocks and CBDokument2 SeitenAssignment - Stocks and CBGhulam HassanNoch keine Bewertungen
- A Final Project For The Course Title "Monetary Policy and Central Banking"Dokument11 SeitenA Final Project For The Course Title "Monetary Policy and Central Banking"Elle SanchezNoch keine Bewertungen
- Oxyacetylene Welding (OAW)Dokument26 SeitenOxyacetylene Welding (OAW)athyrahNoch keine Bewertungen
- Applying Graph Theory to Map ColoringDokument25 SeitenApplying Graph Theory to Map ColoringAnonymous BOreSFNoch keine Bewertungen
- Hydroponics SummaryDokument4 SeitenHydroponics SummaryJose NovoaNoch keine Bewertungen
- UEME 1143 - Dynamics: AssignmentDokument4 SeitenUEME 1143 - Dynamics: Assignmentshikai towNoch keine Bewertungen
- Kina23744ens 002-Seisracks1Dokument147 SeitenKina23744ens 002-Seisracks1Adrian_Condrea_4281Noch keine Bewertungen
- LinkedIn Learning - Workplace Learning Report 2021 EN 1Dokument65 SeitenLinkedIn Learning - Workplace Learning Report 2021 EN 1Ronald FriasNoch keine Bewertungen
- Facebook Facing Off Againt TencentDokument6 SeitenFacebook Facing Off Againt TencentWai Shan Lee0% (1)
- 2017 2 Solarcon Catalogue Final RevisedDokument8 Seiten2017 2 Solarcon Catalogue Final RevisedNavarshi VishnubhotlaNoch keine Bewertungen
- Tips For Effective Presentation Design and DeliveryDokument2 SeitenTips For Effective Presentation Design and DeliveryJames Manrique100% (1)
- Base Is OkDokument84 SeitenBase Is OkajaydevmalikNoch keine Bewertungen
- Bron 2017Dokument73 SeitenBron 2017Anggia BungaNoch keine Bewertungen
- Coca Cola Live-ProjectDokument20 SeitenCoca Cola Live-ProjectKanchan SharmaNoch keine Bewertungen
- PhysicsLab PreReport201Dokument9 SeitenPhysicsLab PreReport201Giuliana SchulzNoch keine Bewertungen
- Pirates and Privateers of the Caribbean: A Guide to the GameDokument25 SeitenPirates and Privateers of the Caribbean: A Guide to the GameLunargypsyNoch keine Bewertungen
- Eurapipe ABS Pipe - Fittings ManualDokument52 SeitenEurapipe ABS Pipe - Fittings ManualLê Minh ĐứcNoch keine Bewertungen
- Lab 1 Boys CalorimeterDokument11 SeitenLab 1 Boys CalorimeterHafizszul Feyzul100% (1)
- New Directions Formative TestDokument1 SeiteNew Directions Formative TestAnonymous xGQcti3qK100% (1)
- A Study On Consumer Buying Behaviour Towards ColgateDokument15 SeitenA Study On Consumer Buying Behaviour Towards Colgatebbhaya427Noch keine Bewertungen
- Kamera Basler Aca2500-20gmDokument20 SeitenKamera Basler Aca2500-20gmJan KubalaNoch keine Bewertungen
- Sheet Metal FormingDokument13 SeitenSheet Metal FormingFranklin SilvaNoch keine Bewertungen
- Entrepreneurial Intentions of Cavite Business StudentsDokument12 SeitenEntrepreneurial Intentions of Cavite Business StudentsKevin Pereña GuinsisanaNoch keine Bewertungen