Das könnte Ihnen auch gefallen
- PIC 16F84A TutorialDokument58 SeitenPIC 16F84A TutorialEduardo LaRaa100% (1)
- Man Pa-4000Dokument18 SeitenMan Pa-4000JOEY76BYNoch keine Bewertungen
- Session 12. Facilities layout-IIDokument34 SeitenSession 12. Facilities layout-IIsandeep kumarNoch keine Bewertungen
- Common-Airbus Tooling PDFDokument67 SeitenCommon-Airbus Tooling PDFChris Calnan100% (1)
- Pic Assem 2004Dokument34 SeitenPic Assem 2004LuisHdz100% (2)
- Projects & Tutorials: DIY Stepper ControllerDokument2 SeitenProjects & Tutorials: DIY Stepper ControllerRafi Andanawari Drajat100% (1)
- Easypic v7 Manual v104cDokument38 SeitenEasypic v7 Manual v104cjuan0537100% (1)
- Characteristics of IC 555Dokument11 SeitenCharacteristics of IC 555ISHAN CHAUDHARYNoch keine Bewertungen
- Using PICKit™ 3 For MPLAB® X IDEDokument1 SeiteUsing PICKit™ 3 For MPLAB® X IDEpopoyboy100% (1)
- 16Fxxx With ICSPDokument3 Seiten16Fxxx With ICSPAlonso Corado100% (2)
- Lab LCDDokument6 SeitenLab LCDJesus Cotrina100% (1)
- Development Kit For E-Paper Display: Dalian Good Display Co., LTDDokument14 SeitenDevelopment Kit For E-Paper Display: Dalian Good Display Co., LTDjhonatan cock100% (1)
- Pic Usb - v2Dokument23 SeitenPic Usb - v2Andres Echeverry100% (1)
- Edn 01 2012Dokument58 SeitenEdn 01 2012尤仁宏100% (3)
- Piu102 Piu201 Piu102 Piu201Dokument2 SeitenPiu102 Piu201 Piu102 Piu201Costel Cojocaru100% (2)
- Tutorial 2 - in Circuit Serial Programming and BootloadersDokument11 SeitenTutorial 2 - in Circuit Serial Programming and Bootloadersecouwoo@scribd100% (1)
- In-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFDokument14 SeitenIn-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFMauro Vargas100% (2)
- Practical PIC ProjectsDokument14 SeitenPractical PIC ProjectsArdhika Dhennis Putra Ananda100% (1)
- Tech ME007 PDFDokument12 SeitenTech ME007 PDFfredniels100% (2)
- Pic-Web Development Board Users Manual: Rev.A, July 2008Dokument14 SeitenPic-Web Development Board Users Manual: Rev.A, July 2008darazzi100% (1)
- Datasheet Sen23292pDokument15 SeitenDatasheet Sen23292pjessie100% (1)
- Breadboard Power SupplyDokument2 SeitenBreadboard Power Supplyelchicogrid100% (2)
- Nodemcu Esp32: Microcontroller Development BoardDokument6 SeitenNodemcu Esp32: Microcontroller Development BoardFernando Piedade100% (1)
- Exploring PIC 24F Series Microcontroller PDFDokument13 SeitenExploring PIC 24F Series Microcontroller PDFErandi Brito100% (1)
- Agribot Project PresentationDokument21 SeitenAgribot Project Presentationumaiya1990100% (1)
- Creating A PWM Signal Using A PIC 16F84Dokument5 SeitenCreating A PWM Signal Using A PIC 16F84saadettin100% (2)
- AVR Hardware Design ConsiderationsDokument14 SeitenAVR Hardware Design ConsiderationsAmarnath M Damodaran100% (1)
- HBridgeMotorControl With PICDokument11 SeitenHBridgeMotorControl With PICcoceicr100% (3)
- USB in A NutShellDokument35 SeitenUSB in A NutShellSandro Jairzinho Carrascal Ayora100% (1)
- 6.3 LCD and KeypadDokument22 Seiten6.3 LCD and KeypadZahier Asyraf100% (2)
- Port PDFDokument16 SeitenPort PDFdharanika100% (1)
- Junebug PiCKIT2Dokument12 SeitenJunebug PiCKIT2wos22100% (1)
- STM32F303 PDFDokument133 SeitenSTM32F303 PDFLuis SenaNoch keine Bewertungen
- USB Chip - Choices Jul2000Dokument5 SeitenUSB Chip - Choices Jul2000Jameskrazy100% (1)
- Non Sinusoidal WaveformsDokument4 SeitenNon Sinusoidal WaveformsMatt Imri100% (1)
- Stepper Motor C CodeDokument4 SeitenStepper Motor C CodeJoël Mwabi100% (1)
- Can Bus SCHDokument1 SeiteCan Bus SCHhoangdai100% (3)
- Testing Pic Code For I2C Master - Slave CommunicationDokument15 SeitenTesting Pic Code For I2C Master - Slave CommunicationJavier Corimaya33% (3)
- IcspDokument14 SeitenIcspJOYCE100% (1)
- 001-57294 AN57294 USB 101 An Introduction To Universal Serial Bus 2.0Dokument57 Seiten001-57294 AN57294 USB 101 An Introduction To Universal Serial Bus 2.0Arturo Picolin100% (1)
- PING) ) ) ™ Ultrasonic Distance Sensor (#28015) : Features Key SpecificationsDokument12 SeitenPING) ) ) ™ Ultrasonic Distance Sensor (#28015) : Features Key SpecificationsAn Vesh100% (1)
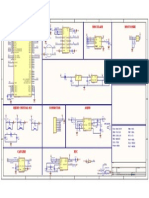
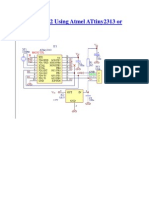
- USB-to-RS232 Using Atmel ATtiny2313 or ATmega8Dokument4 SeitenUSB-to-RS232 Using Atmel ATtiny2313 or ATmega8mikcomi100% (1)
- Theory of Oscilloscope: Introduction To CADDokument23 SeitenTheory of Oscilloscope: Introduction To CADHifdzul Malik ZainalNoch keine Bewertungen
- Masters 2012 - Introduction To Microchip USB SolutionsDokument79 SeitenMasters 2012 - Introduction To Microchip USB SolutionsTech[BR]100% (2)
- USB To RS232 Using Atmel ATtiny2313 or ATmega8Dokument4 SeitenUSB To RS232 Using Atmel ATtiny2313 or ATmega8Nugraha Indrawan100% (2)
- Eeeb371 Pic Exp6newDokument7 SeitenEeeb371 Pic Exp6newSalemAbaad100% (2)
- Schematic Arietta PDFDokument2 SeitenSchematic Arietta PDFAzhar Aslam100% (2)
- LED ChaserDokument7 SeitenLED ChaserMegan Skinner100% (1)
- M I C R o C o N T R o L A D o R e S P I CDokument3 SeitenM I C R o C o N T R o L A D o R e S P I C4gen_7100% (1)
- A Further Study Into The Use of The PIC32MX250F128B, With Side Projects Using The AT91SAM3X8E (Arduino Due) and The Intel GalileoDokument15 SeitenA Further Study Into The Use of The PIC32MX250F128B, With Side Projects Using The AT91SAM3X8E (Arduino Due) and The Intel Galileotahmidmc100% (2)
- PT2312E SDokument5 SeitenPT2312E Sguillecompaq100% (1)
- LCDDokument6 SeitenLCDhugo280603100% (2)
- Group 7 FinalReportDokument27 SeitenGroup 7 FinalReportJust4 Shop100% (1)
- Choosing The Correct DigipotDokument4 SeitenChoosing The Correct Digipottubeman1814100% (1)
- Nokia 5110 3310 Monochrome LCDDokument15 SeitenNokia 5110 3310 Monochrome LCDVitorjssNoch keine Bewertungen
- Integrated Circuit Debugger and Target Board Module (ICD/TB)Dokument10 SeitenIntegrated Circuit Debugger and Target Board Module (ICD/TB)jiunsien5577Noch keine Bewertungen
- Universidad Nacional Pedro Ruiz Gallo: Facultad de Ciencias Físicas y MatemáticasDokument10 SeitenUniversidad Nacional Pedro Ruiz Gallo: Facultad de Ciencias Físicas y MatemáticasFlavio SalazarNoch keine Bewertungen
- Practical Work 4 Salleh AbasDokument10 SeitenPractical Work 4 Salleh AbasMuhd Syazmi F1050Noch keine Bewertungen
- Lab No. 6 Title: Robotic Arm Programming ObjectiveDokument7 SeitenLab No. 6 Title: Robotic Arm Programming ObjectiveadamwaizNoch keine Bewertungen
- Programming PIC Microcontrollers in CDokument126 SeitenProgramming PIC Microcontrollers in CShomeswaran Mugunthan100% (3)
- ET355 Lab 2Dokument11 SeitenET355 Lab 2subdragonNoch keine Bewertungen
- Voltage-Level Detectors Using Op-AmpDokument7 SeitenVoltage-Level Detectors Using Op-AmpMatt Imri0% (1)
- Testing Pic16877a - Foot Sensors Lm324Dokument4 SeitenTesting Pic16877a - Foot Sensors Lm324Matt ImriNoch keine Bewertungen
- Voltage-Level Detectors Using Op-AmpDokument7 SeitenVoltage-Level Detectors Using Op-AmpMatt Imri0% (1)
- Testing The PIC Microcontroller (Pic 16F877A)Dokument6 SeitenTesting The PIC Microcontroller (Pic 16F877A)Matt ImriNoch keine Bewertungen
- Selected Op Amp ApplicationsDokument6 SeitenSelected Op Amp ApplicationsMatt ImriNoch keine Bewertungen
- Lesson 5 Incremental Search MethodDokument1 SeiteLesson 5 Incremental Search MethodMatt ImriNoch keine Bewertungen
- Jfet Common Source AmplifierDokument4 SeitenJfet Common Source AmplifierMatt ImriNoch keine Bewertungen
- Transistor MultivibratorDokument5 SeitenTransistor MultivibratorMatt ImriNoch keine Bewertungen
- A Simple Inverting and Non Inverting AmplifierDokument6 SeitenA Simple Inverting and Non Inverting AmplifierMatt Imri0% (1)
- RC Differentiator & IntegratorDokument6 SeitenRC Differentiator & IntegratorMatt Imri100% (1)
- Sine Wave OscillatorsDokument6 SeitenSine Wave OscillatorsMatt ImriNoch keine Bewertungen
- InductanceDokument3 SeitenInductanceMatt ImriNoch keine Bewertungen
- 555 Astable Circuits and ApplicationsDokument6 Seiten555 Astable Circuits and ApplicationsMatt ImriNoch keine Bewertungen
- Common-Drain As Source FollowerDokument5 SeitenCommon-Drain As Source FollowerMatt ImriNoch keine Bewertungen
- FDM (Telephony) - Laboratory Exercises Using MATLABDokument4 SeitenFDM (Telephony) - Laboratory Exercises Using MATLABMatt ImriNoch keine Bewertungen
- Voltage Divide BiasingDokument4 SeitenVoltage Divide BiasingMatt ImriNoch keine Bewertungen
- Measuring Input and Output Impedance of A Non-Linear CircuitDokument6 SeitenMeasuring Input and Output Impedance of A Non-Linear CircuitMatt ImriNoch keine Bewertungen
- Measuring Am Modulation IndexDokument3 SeitenMeasuring Am Modulation IndexMatt ImriNoch keine Bewertungen
- Expt1 - MATLAB As A CalculatorDokument16 SeitenExpt1 - MATLAB As A CalculatorMatt ImriNoch keine Bewertungen
- Lab 3 Matlab Array & Matrix OperationsDokument14 SeitenLab 3 Matlab Array & Matrix OperationsMatt ImriNoch keine Bewertungen
- Non Sinusoidal WaveformsDokument4 SeitenNon Sinusoidal WaveformsMatt Imri100% (1)
- Inductive ReactanceDokument3 SeitenInductive ReactanceMatt ImriNoch keine Bewertungen
- Transistor MultivibratorDokument5 SeitenTransistor MultivibratorMatt ImriNoch keine Bewertungen
- Rolling Robot Navigation PicDokument6 SeitenRolling Robot Navigation PicMatt Imri100% (1)
- Fourier SeriesDokument5 SeitenFourier SeriesMatt ImriNoch keine Bewertungen
- Microcontroller Using PIC16F877ADokument2 SeitenMicrocontroller Using PIC16F877AMatt ImriNoch keine Bewertungen
- Testing The PIC Microcontroller 16F84ADokument4 SeitenTesting The PIC Microcontroller 16F84AMatt Imri100% (2)
- Introduction To Laplace TransformDokument2 SeitenIntroduction To Laplace TransformMatt Imri100% (1)
- Zener Voltage Regulator CircuitsDokument4 SeitenZener Voltage Regulator CircuitsMatt ImriNoch keine Bewertungen
- Business - 29 Aug 2014Dokument146 SeitenBusiness - 29 Aug 2014Iftikhar AhmedNoch keine Bewertungen
- Roadworthiness Requirements: Vehicle Standards InformationDokument10 SeitenRoadworthiness Requirements: Vehicle Standards Informationstallie001Noch keine Bewertungen
- Simplified Management With Hitachi Command Suite Application BriefDokument19 SeitenSimplified Management With Hitachi Command Suite Application BriefpankajrudrawarNoch keine Bewertungen
- Women in LeadershipDokument17 SeitenWomen in LeadershipSodfa EttafakshiNoch keine Bewertungen
- Deepak ResumeDokument3 SeitenDeepak ResumethiyaguyNoch keine Bewertungen
- Ladle Cleaning Machine Risk Assessment2Dokument6 SeitenLadle Cleaning Machine Risk Assessment2Edgar PenicelaNoch keine Bewertungen
- Foot Step Power Generation Using Piezoelectric MaterialDokument3 SeitenFoot Step Power Generation Using Piezoelectric MaterialYogeshNoch keine Bewertungen
- RhinoGold 4.0 - Level 1 - Tutorial 014P - Half Channel RingDokument2 SeitenRhinoGold 4.0 - Level 1 - Tutorial 014P - Half Channel RingJulio mendoza100% (2)
- Fauzan Ariq Santoso From Marine Electrical Engineering ShipsDokument11 SeitenFauzan Ariq Santoso From Marine Electrical Engineering ShipsFauzan Ariq SantosoNoch keine Bewertungen
- K13 High-Flex Waterproofing SlurryDokument3 SeitenK13 High-Flex Waterproofing SlurryAmila SampathNoch keine Bewertungen
- Installation, Use and Maintenance Manual: Translation of The Original InstructionsDokument148 SeitenInstallation, Use and Maintenance Manual: Translation of The Original InstructionsCTHNoch keine Bewertungen
- Celsius Scale Thermometer Displays The Ambient Temperature Through A LCD DisplayDokument6 SeitenCelsius Scale Thermometer Displays The Ambient Temperature Through A LCD DisplayJaspinder SinghNoch keine Bewertungen
- Improving Lives of South Sudanese Communities Through Water and Sanitation: The Story of Salva DutDokument1 SeiteImproving Lives of South Sudanese Communities Through Water and Sanitation: The Story of Salva DutUNICEF South SudanNoch keine Bewertungen
- Indian CyberSecurity Product Landscape PDFDokument56 SeitenIndian CyberSecurity Product Landscape PDFShaik InayathNoch keine Bewertungen
- Filler Efect in ShotcreteDokument24 SeitenFiller Efect in ShotcreteOscar NietoNoch keine Bewertungen
- Oops-Program 10-MduDokument6 SeitenOops-Program 10-MduAtul MalhotraNoch keine Bewertungen
- Rattan Pole BendingDokument21 SeitenRattan Pole Bendingcintamore_jos355Noch keine Bewertungen
- New Horizons and Opportunities of Modular Constructions and Their TechnologyDokument9 SeitenNew Horizons and Opportunities of Modular Constructions and Their TechnologyPhD. Arch. Klodjan XhexhiNoch keine Bewertungen
- Aerodromes PDFDokument522 SeitenAerodromes PDFaditya100% (1)
- Hotel Cleaning Equipment Used byDokument9 SeitenHotel Cleaning Equipment Used byLeonardo ViridisNoch keine Bewertungen
- 7 Golden Rules of Mobile Testing TemplateDokument36 Seiten7 Golden Rules of Mobile Testing Templatestarvit2Noch keine Bewertungen
- Checklist For Buying A Better Used Car in MalaysiaDokument2 SeitenChecklist For Buying A Better Used Car in MalaysiaSurendra KumarNoch keine Bewertungen
- DD FC Basix ConfDokument18 SeitenDD FC Basix ConfwstanzlNoch keine Bewertungen
- Huawei OLT MA5600T 10G GPON H801XGBD Board Hardware DescriptionDokument6 SeitenHuawei OLT MA5600T 10G GPON H801XGBD Board Hardware DescriptionHuawei GPON Networks100% (1)
- Work and Power Worksheet: Text Text Text Text Text TextDokument2 SeitenWork and Power Worksheet: Text Text Text Text Text TextJvonta DixonNoch keine Bewertungen
- Proses Bisnis Otomotif: Zummayroh, S.PDDokument26 SeitenProses Bisnis Otomotif: Zummayroh, S.PDHannyka FebrianoNoch keine Bewertungen
- Bisskey ThaicomDokument8 SeitenBisskey Thaicomazroy86Noch keine Bewertungen