Das könnte Ihnen auch gefallen
- Skills Plus Listening and Speaking AdvancedDokument106 SeitenSkills Plus Listening and Speaking AdvancedAekkasit Senaart100% (1)
- Syngas Synthesis & Its UseDokument18 SeitenSyngas Synthesis & Its UseAekkasit SenaartNoch keine Bewertungen
- Per TunAY Komplett 25 AprilDokument252 SeitenPer TunAY Komplett 25 AprilAekkasit SenaartNoch keine Bewertungen
- UntitledDokument1 SeiteUntitledAekkasit SenaartNoch keine Bewertungen
- Gasification of Tea (Camellia Sinensis (L.) O. Kuntze) Shrubs For Black Tea Manufacturing Process Heat Generation in Assam, IndiaDokument12 SeitenGasification of Tea (Camellia Sinensis (L.) O. Kuntze) Shrubs For Black Tea Manufacturing Process Heat Generation in Assam, IndiaAekkasit SenaartNoch keine Bewertungen
- Progress in Energy and Combustion Science: Steffen Heidenreich, Pier Ugo FoscoloDokument24 SeitenProgress in Energy and Combustion Science: Steffen Heidenreich, Pier Ugo FoscoloAekkasit SenaartNoch keine Bewertungen
- 10.mechanica..l SpringsDokument149 Seiten10.mechanica..l SpringsAekkasit SenaartNoch keine Bewertungen
- 5.failures Resulting From Static LoadingDokument56 Seiten5.failures Resulting From Static LoadingAekkasit Senaart100% (1)
- 6.fatigue Failures Resulting From Variable LoadingDokument148 Seiten6.fatigue Failures Resulting From Variable LoadingAekkasit SenaartNoch keine Bewertungen
- 7.shafts and Shaft ComponentsDokument90 Seiten7.shafts and Shaft ComponentsAekkasit SenaartNoch keine Bewertungen
- Languages of India (Sheet 6) (MARATHI)Dokument3 SeitenLanguages of India (Sheet 6) (MARATHI)Aekkasit SenaartNoch keine Bewertungen
- 9.welding Bonding Permanent JointsDokument87 Seiten9.welding Bonding Permanent JointsAekkasit SenaartNoch keine Bewertungen
- 1.phase of DesignDokument26 Seiten1.phase of DesignAekkasit SenaartNoch keine Bewertungen
- Languages of India (Take Note)Dokument4 SeitenLanguages of India (Take Note)Aekkasit SenaartNoch keine Bewertungen
- 7 Photo Apps ReportDokument7 Seiten7 Photo Apps ReportAekkasit SenaartNoch keine Bewertungen
- Languages of India (Sheet 5) (HINDI)Dokument10 SeitenLanguages of India (Sheet 5) (HINDI)Aekkasit SenaartNoch keine Bewertungen
- Panta Bhat.: FOOD of IndiaDokument5 SeitenPanta Bhat.: FOOD of IndiaAekkasit SenaartNoch keine Bewertungen
- Languages of India (Sheet 1)Dokument7 SeitenLanguages of India (Sheet 1)Aekkasit SenaartNoch keine Bewertungen
- Formula Sheet ThermoDokument1 SeiteFormula Sheet ThermoAekkasit SenaartNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- CP1 Quantity Calc Roadworks 20221027Dokument2 SeitenCP1 Quantity Calc Roadworks 20221027captaincharizma07100% (1)
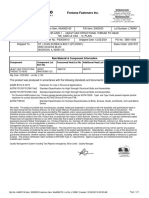
- Cert Perno Hex A325 5.8 (11) X 1-1.2Dokument4 SeitenCert Perno Hex A325 5.8 (11) X 1-1.2Abril SalinasNoch keine Bewertungen
- Design CWRDokument45 SeitenDesign CWRMaitrayee AdityaNoch keine Bewertungen
- Bolted Tanks - GeneralDokument2 SeitenBolted Tanks - GeneralFarhan100% (2)
- Construction Concepts and Terms CompilationDokument9 SeitenConstruction Concepts and Terms CompilationJohn RoaNoch keine Bewertungen
- Iron AlloysDokument6 SeitenIron AlloysHieu NguyenNoch keine Bewertungen
- Plate GirderDokument25 SeitenPlate GirderVarun ShastryNoch keine Bewertungen
- Drill Pipe Tool JointDokument1 SeiteDrill Pipe Tool JointJosh SabimanNoch keine Bewertungen
- Zuelli GDokument15 SeitenZuelli GJohn LucenaNoch keine Bewertungen
- p400 BoltedDokument24 Seitenp400 BoltedCIMARTEC TECNICOSNoch keine Bewertungen
- DIN EN 50600 Question and AnswersDokument2 SeitenDIN EN 50600 Question and AnswersPercy GoitsemangNoch keine Bewertungen
- Datasheet Polystone P CubX ENDokument1 SeiteDatasheet Polystone P CubX ENjavierNoch keine Bewertungen
- Dinding Penahan TanahDokument36 SeitenDinding Penahan TanahMifthah Reino AnantaNoch keine Bewertungen
- Seth Harvey Hendeve IPPPE ME QuizDokument4 SeitenSeth Harvey Hendeve IPPPE ME Quizjeams vidalNoch keine Bewertungen
- Semiahmoo Town Centre RedevelopmentDokument27 SeitenSemiahmoo Town Centre RedevelopmentPaulNoch keine Bewertungen
- Green BuildingDokument35 SeitenGreen BuildingMakna SuarNoch keine Bewertungen
- 0901d196808e5f7c PDF Preview MediumDokument2 Seiten0901d196808e5f7c PDF Preview MediumSanjanNoch keine Bewertungen
- Volume 02 Architecture SpecificationsDokument240 SeitenVolume 02 Architecture SpecificationsAnish MohanNoch keine Bewertungen
- Design of Composite Bridges Use of BS 5400: Part 5: 1979: The Highways Agency BD 16/82Dokument23 SeitenDesign of Composite Bridges Use of BS 5400: Part 5: 1979: The Highways Agency BD 16/82Bobby WongNoch keine Bewertungen
- Assignment 1 (AY1718) - V1 2Dokument5 SeitenAssignment 1 (AY1718) - V1 2Szeto Wa kwanNoch keine Bewertungen
- Vol.03 - Complete Guide To Temperature GradientDokument11 SeitenVol.03 - Complete Guide To Temperature GradientShadi100% (1)
- Bending Stress CalculationsDokument4 SeitenBending Stress Calculationsschaali100% (5)
- Chair Principal Staff Liaison: Bonnie E. Manley: NFPA 220Dokument8 SeitenChair Principal Staff Liaison: Bonnie E. Manley: NFPA 220Diego Alejandro VelascoNoch keine Bewertungen
- BSD - Module 3 Fire Protection: To Be An FSIDokument2 SeitenBSD - Module 3 Fire Protection: To Be An FSIJeremae OroNoch keine Bewertungen
- Ducts BOQDokument263 SeitenDucts BOQsyed abutalhaNoch keine Bewertungen
- T-Wall: Construction ManualDokument11 SeitenT-Wall: Construction ManualAleksa CavicNoch keine Bewertungen
- Nissan Altima 2007 2013 Engine MechanicalDokument20 SeitenNissan Altima 2007 2013 Engine Mechanicalfrankie100% (46)
- SAAH March2010Dokument52 SeitenSAAH March2010Sheeba MathewNoch keine Bewertungen
- Perfecting Piping and Duct Systems For Revit: Learning ObjectivesDokument45 SeitenPerfecting Piping and Duct Systems For Revit: Learning ObjectivessupportLSMNoch keine Bewertungen
- Earthquake Eng Exam 1Dokument22 SeitenEarthquake Eng Exam 1G-ann DatarioNoch keine Bewertungen