Das könnte Ihnen auch gefallen
- Saturn V Payload Planner's GuideDokument72 SeitenSaturn V Payload Planner's GuideBob Andrepont100% (1)
- Mitesh Patel PDFDokument92 SeitenMitesh Patel PDFVinod Muda77% (13)
- 4.000in 0.330wall IU CYX105-120 XT39 (4.875 X 2.688 TJ) 12P 15BDokument3 Seiten4.000in 0.330wall IU CYX105-120 XT39 (4.875 X 2.688 TJ) 12P 15BjohangomezruizNoch keine Bewertungen
- Physics - NCERTDokument154 SeitenPhysics - NCERTPirated VirusNoch keine Bewertungen
- NASA TMX-64623 Rover Mobility SystemsDokument41 SeitenNASA TMX-64623 Rover Mobility SystemsalmostreadyNoch keine Bewertungen
- Microsoft PowerPoint 2010 TutorialDokument10 SeitenMicrosoft PowerPoint 2010 Tutorialchronos65340% (1)
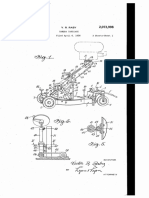
- Tow Target Cable Drag Mechanism (1941)Dokument4 SeitenTow Target Cable Drag Mechanism (1941)CAP History LibraryNoch keine Bewertungen
- Aerial Tow Target (1954)Dokument13 SeitenAerial Tow Target (1954)CAP History LibraryNoch keine Bewertungen
- Us 2912244Dokument9 SeitenUs 2912244alexhkiNoch keine Bewertungen
- Happy Startup EbookDokument72 SeitenHappy Startup EbookLucca CinquarolliNoch keine Bewertungen
- Robotics Course StructureDokument4 SeitenRobotics Course StructurerohitNoch keine Bewertungen
- How To Prepare Literature ReviewsDokument18 SeitenHow To Prepare Literature ReviewsshyamsundarsrNoch keine Bewertungen
- (Gina Carol Barney) Elevator Traffic Handbook The (BookFi)Dokument7 Seiten(Gina Carol Barney) Elevator Traffic Handbook The (BookFi)AdiyNoch keine Bewertungen
- 3850 Mathematics Stage 3 Marking Guide Sample 2Dokument1 Seite3850 Mathematics Stage 3 Marking Guide Sample 2AshleeGedeliahNoch keine Bewertungen
- Us4200161 PDFDokument6 SeitenUs4200161 PDFBrunno VasquesNoch keine Bewertungen
- C. C. Cutler Attitude Control For Satellite Vehicles 2 Sheets-Shut 1Dokument5 SeitenC. C. Cutler Attitude Control For Satellite Vehicles 2 Sheets-Shut 1david19775891Noch keine Bewertungen
- Filed April 2, 1946Dokument4 SeitenFiled April 2, 1946lfilippiniNoch keine Bewertungen
- United States Patent (19) : ChiappettiDokument6 SeitenUnited States Patent (19) : ChiappettiOctavio HernandezNoch keine Bewertungen
- United States Patent: Dreve, Jr. (45) May 16, 1972Dokument6 SeitenUnited States Patent: Dreve, Jr. (45) May 16, 1972RodrigoPomaNoch keine Bewertungen
- Mobile car washer moves along rail to clean vehiclesDokument3 SeitenMobile car washer moves along rail to clean vehiclesdfsdfsdfsdfNoch keine Bewertungen
- European Patent Application - VoidmeterDokument9 SeitenEuropean Patent Application - Voidmeterazlan.shareNoch keine Bewertungen
- Gujarat Lifts and Escalators Rules, 2001Dokument46 SeitenGujarat Lifts and Escalators Rules, 2001gautam.1816503520Noch keine Bewertungen
- Jurnal Bubut FixsafasfasfDokument6 SeitenJurnal Bubut FixsafasfasfAdiBimaSanjaya100% (1)
- Military Searchlight Truck (1937)Dokument8 SeitenMilitary Searchlight Truck (1937)CAP History LibraryNoch keine Bewertungen
- Expressway Power Generating System Converts Kinetic Energy to ElectricityDokument4 SeitenExpressway Power Generating System Converts Kinetic Energy to ElectricityOctavio HernandezNoch keine Bewertungen
- Wheeled Robot For Geophysical SurveyDokument6 SeitenWheeled Robot For Geophysical SurveyMili MeriNoch keine Bewertungen
- Lifting and transferring apparatus patent from 1945Dokument6 SeitenLifting and transferring apparatus patent from 1945varun mNoch keine Bewertungen
- Automatic roll changing system for metal rolling millsDokument6 SeitenAutomatic roll changing system for metal rolling millsPooria1989Noch keine Bewertungen
- Sept. 23, 1969 C. P. Nanney Etal 3,458,436: Filed July 7. 1967Dokument18 SeitenSept. 23, 1969 C. P. Nanney Etal 3,458,436: Filed July 7. 1967Catalin AlexandruNoch keine Bewertungen
- April 25, 1933. J. 5. Finlay Et Al: Filed Feb 25, 1932Dokument8 SeitenApril 25, 1933. J. 5. Finlay Et Al: Filed Feb 25, 1932jojaberiNoch keine Bewertungen
- Us 8210068us 8210068us 8210068us 8210068Dokument9 SeitenUs 8210068us 8210068us 8210068us 8210068JameszouqunNoch keine Bewertungen
- Pantente Primer DollyDokument6 SeitenPantente Primer DollyJorge SotoNoch keine Bewertungen
- EP1939114A1Dokument17 SeitenEP1939114A1Chaman KumarNoch keine Bewertungen
- 1895 - Us570025Dokument5 Seiten1895 - Us570025Enrico Bruce GioloNoch keine Bewertungen
- EP1559668A1Dokument16 SeitenEP1559668A1Jeison Giraldo TrujilloNoch keine Bewertungen
- US patent for balanced lifting beam craneDokument3 SeitenUS patent for balanced lifting beam cranegibson_sx87Noch keine Bewertungen
- Patent Application Publication (10) Pub. No.: US 2013/0251481 A1Dokument11 SeitenPatent Application Publication (10) Pub. No.: US 2013/0251481 A1Gilberto ZencovNoch keine Bewertungen
- Braiding MachineDokument7 SeitenBraiding Machinejojaberi100% (1)
- Position Control of a Mobile Robot Through PID ConDokument7 SeitenPosition Control of a Mobile Robot Through PID ConTuan Anh HoangNoch keine Bewertungen
- Isystem Hardware: Robotics: Screen 1Dokument9 SeitenIsystem Hardware: Robotics: Screen 1Francisco Rodriguez CozarNoch keine Bewertungen
- West Bengal Lifts and Escalators Act, 1955Dokument11 SeitenWest Bengal Lifts and Escalators Act, 1955Latest Laws TeamNoch keine Bewertungen
- April 2, 1946-C. F. Voytech - 2,397,634: Filed Oc'C. 19, 1945 2 Sheets-Sheet 1Dokument8 SeitenApril 2, 1946-C. F. Voytech - 2,397,634: Filed Oc'C. 19, 1945 2 Sheets-Sheet 1belchior alvaroNoch keine Bewertungen
- Conveyer Screw Stops Bottles for LabelingDokument3 SeitenConveyer Screw Stops Bottles for LabelingChristian MavarezNoch keine Bewertungen
- US3492637Dokument8 SeitenUS3492637Gustavo RipoliNoch keine Bewertungen
- Beidler v. United States, 253 U.S. 447 (1920)Dokument5 SeitenBeidler v. United States, 253 U.S. 447 (1920)Scribd Government DocsNoch keine Bewertungen
- RR PatentsDokument7 SeitenRR PatentsAlan SmartNoch keine Bewertungen
- US3173686 (Coin-Op Kiddie Ride)Dokument8 SeitenUS3173686 (Coin-Op Kiddie Ride)ENoch keine Bewertungen
- United States Patent (191: Rempfer Et A1. (451 Jan. 16,1973Dokument8 SeitenUnited States Patent (191: Rempfer Et A1. (451 Jan. 16,1973rte678Noch keine Bewertungen
- RotodomeDokument14 SeitenRotodomeSharan RajNoch keine Bewertungen
- Us2935914 PDFDokument14 SeitenUs2935914 PDFMichael LaneNoch keine Bewertungen
- United States Patent: Perlo Et Al. (45) Date of Patent: Dec. 20, 2005Dokument10 SeitenUnited States Patent: Perlo Et Al. (45) Date of Patent: Dec. 20, 2005tristanNoch keine Bewertungen
- Shaft Mounting Device Measures and Controls Thrust LoadsDokument7 SeitenShaft Mounting Device Measures and Controls Thrust LoadsNicandroGonzalesNoch keine Bewertungen
- United States: (12) Patent Application Publication (10) Pub. No.: US 2014/0021016 A1Dokument14 SeitenUnited States: (12) Patent Application Publication (10) Pub. No.: US 2014/0021016 A1Kalai SelvanNoch keine Bewertungen
- Dobby ControlDokument14 SeitenDobby ControlPradip GuptaNoch keine Bewertungen
- Material Flow Control System Patent AnalysisDokument11 SeitenMaterial Flow Control System Patent AnalysisPrathamesh NaikNoch keine Bewertungen
- Monorail - US4996928Dokument8 SeitenMonorail - US4996928Rob ZelNoch keine Bewertungen
- Albac GliderDokument7 SeitenAlbac GliderJohn Raja RaviKiran KopelliNoch keine Bewertungen
- United States: (12) Patent Application Publication (10) Pub. No.: US 2011/0112687 A1Dokument7 SeitenUnited States: (12) Patent Application Publication (10) Pub. No.: US 2011/0112687 A1Robert DeaconuNoch keine Bewertungen
- Wagner Iron Works v. Koehring Company, A Wisconsin Corporation, Wagner Iron Works v. Henry Manufacturing Company, Inc., 282 F.2d 317, 10th Cir. (1960)Dokument10 SeitenWagner Iron Works v. Koehring Company, A Wisconsin Corporation, Wagner Iron Works v. Henry Manufacturing Company, Inc., 282 F.2d 317, 10th Cir. (1960)Scribd Government DocsNoch keine Bewertungen
- EP09166154NWA1Dokument10 SeitenEP09166154NWA1maes.daan1Noch keine Bewertungen
- Aligning Overhead Crane Rails - HOIST MagazineDokument3 SeitenAligning Overhead Crane Rails - HOIST MagazineDaniel ConwayNoch keine Bewertungen
- Automatic control system loads wheel loader bucketDokument16 SeitenAutomatic control system loads wheel loader bucketrevange2112Noch keine Bewertungen
- EP1070663A2Dokument4 SeitenEP1070663A2atabNoch keine Bewertungen
- United States Patent (19) : Bock (45) Feb. 5, 1974Dokument7 SeitenUnited States Patent (19) : Bock (45) Feb. 5, 1974gorgiNoch keine Bewertungen
- United States Patent (19) : (45) June 24, 1975Dokument7 SeitenUnited States Patent (19) : (45) June 24, 1975Rodrigo ContrerasNoch keine Bewertungen
- Karnataka LEP Rules, 2015 PDFDokument45 SeitenKarnataka LEP Rules, 2015 PDFpmbhatNoch keine Bewertungen
- Illlllllllllilllllllllilllllllllli: United States Patent (191Dokument3 SeitenIlllllllllllilllllllllilllllllllli: United States Patent (191dgfsduuwioNoch keine Bewertungen
- Sources of Constitution (Top MCQ)Dokument26 SeitenSources of Constitution (Top MCQ)Prathamesh NaikNoch keine Bewertungen
- QUOTATIONDokument1 SeiteQUOTATIONPrathamesh NaikNoch keine Bewertungen
- Fundamental Rights (Top MCQ)Dokument23 SeitenFundamental Rights (Top MCQ)Prathamesh NaikNoch keine Bewertungen
- Rectt Advt Through GATE 2024Dokument11 SeitenRectt Advt Through GATE 2024jedrghq.1Noch keine Bewertungen
- Fundamental Rights MCQDokument60 SeitenFundamental Rights MCQPrathamesh NaikNoch keine Bewertungen
- Boiler: Following Are The Safety Concerns of The Boiler Which Can Lead To Catastrophic FailuresDokument3 SeitenBoiler: Following Are The Safety Concerns of The Boiler Which Can Lead To Catastrophic FailuresPrathamesh NaikNoch keine Bewertungen
- Management Accounting Principles and Practices BookDokument4 SeitenManagement Accounting Principles and Practices BookPrathamesh NaikNoch keine Bewertungen
- Welcome! This Download Is Provided To You By: Visit Us For Thousands of FREE and UPDATED PC Software!Dokument1 SeiteWelcome! This Download Is Provided To You By: Visit Us For Thousands of FREE and UPDATED PC Software!Prathamesh NaikNoch keine Bewertungen
- Imp Committees (समितियां)Dokument32 SeitenImp Committees (समितियां)Prathamesh NaikNoch keine Bewertungen
- Management Accounting: Principles and Practices: January 2018Dokument4 SeitenManagement Accounting: Principles and Practices: January 2018Prathamesh NaikNoch keine Bewertungen
- Goa Engineering College ExamDokument34 SeitenGoa Engineering College ExamPrathamesh NaikNoch keine Bewertungen
- Godrej Infotec Placement Paper - Freshers ChoiceDokument2 SeitenGodrej Infotec Placement Paper - Freshers ChoicefresherschoiceNoch keine Bewertungen
- Book 2Dokument1 SeiteBook 2Prathamesh NaikNoch keine Bewertungen
- ReadmeDokument2 SeitenReadmetacksilvaNoch keine Bewertungen
- Gate 2 PDFDokument20 SeitenGate 2 PDFPrathamesh NaikNoch keine Bewertungen
- (WWW - Entrance Exam - Net) Paper 4Dokument2 Seiten(WWW - Entrance Exam - Net) Paper 4Prathamesh NaikNoch keine Bewertungen
- Study and Improvement in Operations of Chemical PlantDokument38 SeitenStudy and Improvement in Operations of Chemical PlantPrathamesh NaikNoch keine Bewertungen
- Temperature Sensor Temperature Range: 373k-573k: SR - No Components Specifications ExampleDokument3 SeitenTemperature Sensor Temperature Range: 373k-573k: SR - No Components Specifications ExamplePrathamesh NaikNoch keine Bewertungen
- Study and Improvement in Operations of Chemical Plant: Guide: Shri. Mahesh DhawalikarDokument68 SeitenStudy and Improvement in Operations of Chemical Plant: Guide: Shri. Mahesh DhawalikarPrathamesh NaikNoch keine Bewertungen
- Gate 2015 S02Dokument24 SeitenGate 2015 S02Irfan ShaikhNoch keine Bewertungen
- Study and Improvement in Operations of Chemical PlantDokument38 SeitenStudy and Improvement in Operations of Chemical PlantPrathamesh NaikNoch keine Bewertungen
- Anjoom Naik: Personal DetailsDokument3 SeitenAnjoom Naik: Personal DetailsPrathamesh NaikNoch keine Bewertungen
- Mechanical Engineer Resume with Project DetailsDokument3 SeitenMechanical Engineer Resume with Project DetailsPrathamesh NaikNoch keine Bewertungen
- Government of Goa: Directorate of Technical EducationDokument1 SeiteGovernment of Goa: Directorate of Technical EducationPrathamesh NaikNoch keine Bewertungen
- AIM R16 WS01 Exhaust ManifoldDokument26 SeitenAIM R16 WS01 Exhaust ManifoldBinod DhakalNoch keine Bewertungen
- AIM R16 WS09 Pipe Assembly PDFDokument14 SeitenAIM R16 WS09 Pipe Assembly PDFIan AsNoch keine Bewertungen
- AIM R16 WS09 Pipe Assembly PDFDokument14 SeitenAIM R16 WS09 Pipe Assembly PDFIan AsNoch keine Bewertungen
- Social Web Analytics Using R Graph TheoryDokument7 SeitenSocial Web Analytics Using R Graph TheoryParveshNoch keine Bewertungen
- Halo: The Empyrean EffectDokument6 SeitenHalo: The Empyrean EffectStephen PerezNoch keine Bewertungen
- Interplay Thermal Activation QTMDokument5 SeitenInterplay Thermal Activation QTMvanalexbluesNoch keine Bewertungen
- Lethe Berner Keep Warm Drawer BHW 70 2 MANDokument17 SeitenLethe Berner Keep Warm Drawer BHW 70 2 MANGolden OdyesseyNoch keine Bewertungen
- Lampiran Heat Stress Dan ThiDokument2 SeitenLampiran Heat Stress Dan ThiRaviNoch keine Bewertungen
- LESSON PLAN EnglishDokument7 SeitenLESSON PLAN EnglishMarie Antonette Aco BarbaNoch keine Bewertungen
- Low Cost Earthquake Resistant Housing Construction in India: I. Abstract & IntroductionDokument3 SeitenLow Cost Earthquake Resistant Housing Construction in India: I. Abstract & IntroductionArvind BajpaiNoch keine Bewertungen
- PR1Dokument74 SeitenPR1Danna Mae H. PeñaNoch keine Bewertungen
- Soukup 2002Dokument7 SeitenSoukup 2002Rodrigo DaliaNoch keine Bewertungen
- Peng - FM 1.Dokument28 SeitenPeng - FM 1.Aliya JamesNoch keine Bewertungen
- DLL - Mathematics 6 - Q1 - W7Dokument9 SeitenDLL - Mathematics 6 - Q1 - W7maria gvlenn macanasNoch keine Bewertungen
- Board of Education Meeting Observation ReportDokument3 SeitenBoard of Education Meeting Observation ReportBidita RahmanNoch keine Bewertungen
- Economic Problems of Population ChangeDokument27 SeitenEconomic Problems of Population ChangeAner Salčinović100% (1)
- Data Science CodealphaDokument11 SeitenData Science CodealphaSharef Eddine ArarNoch keine Bewertungen
- The Horace Mann Record: Delegations Win Best With Model PerformancesDokument8 SeitenThe Horace Mann Record: Delegations Win Best With Model PerformancesJeff BargNoch keine Bewertungen
- SPH Mass ConservationDokument15 SeitenSPH Mass ConservationnahkbceNoch keine Bewertungen
- The Pipelined RiSC-16 ComputerDokument9 SeitenThe Pipelined RiSC-16 Computerkb_lu232Noch keine Bewertungen
- Electrohydrodynamic Atomization (EHDA)Dokument15 SeitenElectrohydrodynamic Atomization (EHDA)Ananya SinghNoch keine Bewertungen
- Brigada Eskwela 2019Dokument12 SeitenBrigada Eskwela 2019Renelyn Rodrigo SugarolNoch keine Bewertungen
- HBR How To PitchDokument9 SeitenHBR How To PitchA.J.Noch keine Bewertungen
- Final Examination: Print DateDokument1 SeiteFinal Examination: Print Datemanish khadkaNoch keine Bewertungen
- BPO CampaignsDokument2 SeitenBPO CampaignsKiran Nair RNoch keine Bewertungen
- Gen Ed Day 5Dokument5 SeitenGen Ed Day 5Jessica Villanueva100% (1)