Das könnte Ihnen auch gefallen
- High Pressure High TemperatureDokument15 SeitenHigh Pressure High TemperatureFrancisco Rafael Cerón100% (1)
- Oil Shale PDFDokument59 SeitenOil Shale PDFPondok Huda100% (3)
- Site ReviewDokument130 SeitenSite ReviewPondok HudaNoch keine Bewertungen
- Upscale1 PDFDokument8 SeitenUpscale1 PDFPondok HudaNoch keine Bewertungen
- Global EngineersDokument114 SeitenGlobal EngineersPondok HudaNoch keine Bewertungen
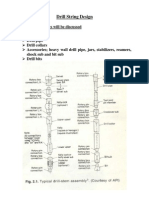
- Drill String DesignDokument12 SeitenDrill String DesignAsaadgz100% (1)
- TGA Applications in Fossil Fuel CharacterizationDokument509 SeitenTGA Applications in Fossil Fuel CharacterizationPondok HudaNoch keine Bewertungen
- H011859 GoM IC PDFDokument2 SeitenH011859 GoM IC PDFPondok HudaNoch keine Bewertungen
- Relative Perm From PCDokument10 SeitenRelative Perm From PCPondok HudaNoch keine Bewertungen
- Transformational LeadershipDokument1 SeiteTransformational LeadershipPondok HudaNoch keine Bewertungen
- Thesis MohamDokument461 SeitenThesis MohamPondok HudaNoch keine Bewertungen
- 216 Lab ManualDokument77 Seiten216 Lab Manualniyo7Noch keine Bewertungen
- 1.4.2 Prospect Resource Assessment Three-Point Method (J.E. Warren 1980-1984)Dokument4 Seiten1.4.2 Prospect Resource Assessment Three-Point Method (J.E. Warren 1980-1984)Pondok HudaNoch keine Bewertungen
- PTA Using Generated Well Test Data PDFDokument94 SeitenPTA Using Generated Well Test Data PDFLaPresencia82Noch keine Bewertungen
- Geologic Resource Assesment PDFDokument57 SeitenGeologic Resource Assesment PDFPondok HudaNoch keine Bewertungen
- 1.4.2 Prospect Resource Assessment Three-Point Method (J.E. Warren 1980-1984)Dokument4 Seiten1.4.2 Prospect Resource Assessment Three-Point Method (J.E. Warren 1980-1984)Pondok HudaNoch keine Bewertungen
- Ions O&G Resources and Reserves Per COGEH Vol 1Dokument21 SeitenIons O&G Resources and Reserves Per COGEH Vol 1ashmanganoNoch keine Bewertungen
- DeconvolutonDokument22 SeitenDeconvolutonPondok HudaNoch keine Bewertungen
- Snedden PDFDokument22 SeitenSnedden PDFALIALIRAZARAZAMALIKNoch keine Bewertungen
- Ions O&G Resources and Reserves Per COGEH Vol 1Dokument21 SeitenIons O&G Resources and Reserves Per COGEH Vol 1ashmanganoNoch keine Bewertungen
- Application of Statistic For Petroleum IndustryDokument2 SeitenApplication of Statistic For Petroleum IndustryPondok HudaNoch keine Bewertungen
- CCOP Petroleum Resource Classification System ExplainedDokument20 SeitenCCOP Petroleum Resource Classification System ExplainedPondok HudaNoch keine Bewertungen
- PR#RSP Aditya Ilham IdrusDokument8 SeitenPR#RSP Aditya Ilham IdrusPondok HudaNoch keine Bewertungen
- Thesis Updated Screening Criteria For Steam Flooding Based On Oil Field ProjectsDokument74 SeitenThesis Updated Screening Criteria For Steam Flooding Based On Oil Field ProjectsPondok HudaNoch keine Bewertungen
- UTS 18 April 2014 Soal No 2Dokument2 SeitenUTS 18 April 2014 Soal No 2Pondok HudaNoch keine Bewertungen
- Aropub Ijpge 14 103Dokument27 SeitenAropub Ijpge 14 103Pondok HudaNoch keine Bewertungen
- SAGD Start-Up StrategiesDokument14 SeitenSAGD Start-Up StrategiesisleepinadrawerNoch keine Bewertungen
- UTS 18 April 2014 Soal No 1Dokument6 SeitenUTS 18 April 2014 Soal No 1Pondok HudaNoch keine Bewertungen
- TEKNIK PRODUKSI II SRPDokument10 SeitenTEKNIK PRODUKSI II SRPPondok HudaNoch keine Bewertungen
- Review of Low Salinity Water Flooding for Oil RecoveryDokument41 SeitenReview of Low Salinity Water Flooding for Oil RecoveryPondok Huda100% (2)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Learning English With The Sims: Exploiting Authentic Computer Simulation Games For L2 LearningDokument16 SeitenLearning English With The Sims: Exploiting Authentic Computer Simulation Games For L2 LearningSiskawpNoch keine Bewertungen
- Williams Et Al. - 2013 - Assumptions of Multiple Regression Correcting TwoDokument15 SeitenWilliams Et Al. - 2013 - Assumptions of Multiple Regression Correcting TwoVíctor JuradoNoch keine Bewertungen
- Robust Analysis of VarianceDokument2 SeitenRobust Analysis of VariancejaymNoch keine Bewertungen
- The Fear of Death and The Fear of DyingDokument5 SeitenThe Fear of Death and The Fear of DyingAgãpe LenõreNoch keine Bewertungen
- Promoting Fertility Awareness and Preconception Health Using A Chatbot: A Randomized Controlled TrialDokument11 SeitenPromoting Fertility Awareness and Preconception Health Using A Chatbot: A Randomized Controlled TrialGetz23Noch keine Bewertungen
- Bpe Lab ManualDokument61 SeitenBpe Lab ManualCivil JeganNoch keine Bewertungen
- Effects of Dyslexia On Postural Control in AdultsDokument14 SeitenEffects of Dyslexia On Postural Control in AdultsRahma AffesNoch keine Bewertungen
- Application of Biostatistics in OrthodonticsDokument117 SeitenApplication of Biostatistics in OrthodonticsJoshua StalinNoch keine Bewertungen
- Kruskal Wallis Test PDFDokument2 SeitenKruskal Wallis Test PDFSreya Sanil100% (1)
- 2022-Experimental and Computer Simulation of A Molecular Distillation Process For The Dehydration of Tetramethylammonium Hydroxide SolutionDokument10 Seiten2022-Experimental and Computer Simulation of A Molecular Distillation Process For The Dehydration of Tetramethylammonium Hydroxide SolutionChantelleNoch keine Bewertungen
- University of Sindh: BBA (H) Research ProjectDokument28 SeitenUniversity of Sindh: BBA (H) Research ProjectSattar CANoch keine Bewertungen
- Kormanik 2002Dokument10 SeitenKormanik 2002sinta amamiNoch keine Bewertungen
- Big Cinemas Customer Satisfaction Survey 2010Dokument22 SeitenBig Cinemas Customer Satisfaction Survey 2010munindrapandey75% (8)
- Brand Purchasing BehaviourDokument16 SeitenBrand Purchasing BehaviourmismaillNoch keine Bewertungen
- 03 - Surface Roughness Analysis in Finishing End-Milling of Duplex Stainless Steel UNS S32205Dokument10 Seiten03 - Surface Roughness Analysis in Finishing End-Milling of Duplex Stainless Steel UNS S32205Gustavo Rocha de QueirozNoch keine Bewertungen
- Groups Count Sum Average VarianceDokument6 SeitenGroups Count Sum Average VarianceAgANoch keine Bewertungen
- Educational Larp Case Study Boosts Middle Schoolers' Science EngagementDokument23 SeitenEducational Larp Case Study Boosts Middle Schoolers' Science EngagementBenShaweNoch keine Bewertungen
- A Report On Mental RotationDokument9 SeitenA Report On Mental RotationImani ImaniNoch keine Bewertungen
- 4th Sem Detailed Syllabus (B. Sc. in Data Science)Dokument5 Seiten4th Sem Detailed Syllabus (B. Sc. in Data Science)kbhowalNoch keine Bewertungen
- Biotechnology BiochemistryDokument6 SeitenBiotechnology BiochemistrybobmarcNoch keine Bewertungen
- 6th Generation Self Etching Primers - Endo / Orthodontic Courses by Indian Dental AcademyDokument33 Seiten6th Generation Self Etching Primers - Endo / Orthodontic Courses by Indian Dental Academyindian dental academyNoch keine Bewertungen
- Caro 2013Dokument9 SeitenCaro 2013avishekkgecNoch keine Bewertungen
- Between-Session Reliability of Four Hop Tests and The Agility T-TestDokument8 SeitenBetween-Session Reliability of Four Hop Tests and The Agility T-TestsebastixmasterNoch keine Bewertungen
- 11.feature Selection, ExtractionDokument38 Seiten11.feature Selection, ExtractionLUV ARORANoch keine Bewertungen
- Format Action ResearchDokument8 SeitenFormat Action Researchnorvel1950% (2)
- SENSORY BANANA PEELDokument8 SeitenSENSORY BANANA PEELChoy Concha Albasin Eugenio-MarzoNoch keine Bewertungen
- PSEUDOREPLICACIONDokument25 SeitenPSEUDOREPLICACIONDavid Mero del ValleNoch keine Bewertungen
- 2008, Editrice Kurtis: Square-Stepping Exercise Versus Strength and Balance Training For Fall Risk FactorsDokument6 Seiten2008, Editrice Kurtis: Square-Stepping Exercise Versus Strength and Balance Training For Fall Risk Factorsnandhini raguNoch keine Bewertungen
- Effectiveness of Physical Therapy and Exercise On Pain and Functional Status in Patients With Chronic Low Back Pain: A Randomized-Controlled TrialDokument7 SeitenEffectiveness of Physical Therapy and Exercise On Pain and Functional Status in Patients With Chronic Low Back Pain: A Randomized-Controlled TrialRachmawan WijayaNoch keine Bewertungen
- Ferguson & FraserDokument17 SeitenFerguson & FraserAchmad NizarNoch keine Bewertungen