Das könnte Ihnen auch gefallen
- Fully Autonomous Vehicles: Visions of the future or still reality?Von EverandFully Autonomous Vehicles: Visions of the future or still reality?Noch keine Bewertungen
- Power Electronics and Electric Drives for Traction ApplicationsVon EverandPower Electronics and Electric Drives for Traction ApplicationsNoch keine Bewertungen
- CAN BUS Wire RepairDokument1 SeiteCAN BUS Wire RepairMMNoch keine Bewertungen
- 4 Wheel Alignment On A Mazda MXDokument24 Seiten4 Wheel Alignment On A Mazda MXJam BabNoch keine Bewertungen
- Wide Band O2 Sensors: DiagnosingDokument2 SeitenWide Band O2 Sensors: DiagnosingMax Bike MartinezNoch keine Bewertungen
- Toyota Electrical ConceptsDokument30 SeitenToyota Electrical ConceptsNDD1959100% (3)
- Automotive ElectronicsDokument63 SeitenAutomotive ElectronicsSona Uttappa NambudumadaNoch keine Bewertungen
- 1920 AutomotivewiringDokument818 Seiten1920 Automotivewiringdeguara100% (3)
- Steering Angle Sensor E38 M57Dokument2 SeitenSteering Angle Sensor E38 M57Michal PiratzNoch keine Bewertungen
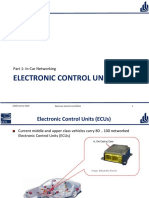
- 05 EcusDokument27 Seiten05 EcusJavier100% (3)
- Automotive Sensors & Actuators - PreconferenceDokument68 SeitenAutomotive Sensors & Actuators - PreconferenceSiddharth Narayanan ChidambareswaranNoch keine Bewertungen
- BYPASS Map SENSORDokument3 SeitenBYPASS Map SENSORKushal ExpertNoch keine Bewertungen
- Benz - Vehicle NetworkingDokument27 SeitenBenz - Vehicle NetworkingAnanthNoch keine Bewertungen
- BMW 6 E65-66 Air SuspensionsDokument17 SeitenBMW 6 E65-66 Air SuspensionsSalisburNoch keine Bewertungen
- Hybrid13 - Fuel - EVAP System PDFDokument18 SeitenHybrid13 - Fuel - EVAP System PDFlongtrandang5867100% (1)
- Automotive SensorsDokument29 SeitenAutomotive SensorsLeoNoch keine Bewertungen
- ImmobilizerDokument6 SeitenImmobilizerBenz Aio Calachua Araujo100% (2)
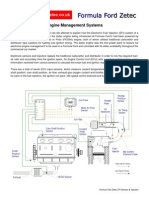
- FF EcuDokument9 SeitenFF EcuEduardo J CondeNoch keine Bewertungen
- MM40 Wire&SensorDokument37 SeitenMM40 Wire&Sensorapi-19766924Noch keine Bewertungen
- Map Sensor Drivability SymptomsDokument15 SeitenMap Sensor Drivability SymptomsmichaelsilvaNoch keine Bewertungen
- Automotive Power ElectronicsDokument80 SeitenAutomotive Power Electronicslusthawk100% (9)
- Map Sensor Diagnosis by Pierburg PDFDokument4 SeitenMap Sensor Diagnosis by Pierburg PDFIonut-alexandru IordacheNoch keine Bewertungen
- Wheel Speed Sensors. Function, Diagnosis and Troubleshooting PDFDokument12 SeitenWheel Speed Sensors. Function, Diagnosis and Troubleshooting PDFmadhan100% (3)
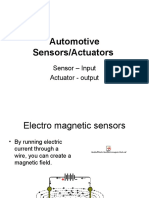
- Automotive Sensors/Actuators: Sensor - Input Actuator - OutputDokument23 SeitenAutomotive Sensors/Actuators: Sensor - Input Actuator - Outputcbatawala100% (2)
- Automotive SensorsDokument12 SeitenAutomotive SensorsAshish Keshkamat100% (1)
- Direct Injection Test (Voltage Vs Current) (Picoscope)Dokument7 SeitenDirect Injection Test (Voltage Vs Current) (Picoscope)Toni JuanNoch keine Bewertungen
- Distributor Less Ignition SystemsDokument4 SeitenDistributor Less Ignition SystemsxLibelle100% (5)
- 4 OBD OverviewDokument21 Seiten4 OBD OverviewFelipe Naxo Becerra Arriagada100% (1)
- Automotive Electrical & ElectronicsDokument50 SeitenAutomotive Electrical & ElectronicsleninkishgmailcomNoch keine Bewertungen
- OBD II DiagnosticsDokument148 SeitenOBD II DiagnosticsMiguel CereceroNoch keine Bewertungen
- Steering Angle Sensor ResetsDokument57 SeitenSteering Angle Sensor ResetsAunaunZaa'Noch keine Bewertungen
- Embedded Systems Solutions: Key FeaturesDokument2 SeitenEmbedded Systems Solutions: Key Featureschandramohan muruganNoch keine Bewertungen
- CAN Mode 6Dokument12 SeitenCAN Mode 6Abdulbaset Selwy100% (1)
- Different Types of VVT VTECDokument12 SeitenDifferent Types of VVT VTECshahrizalNoch keine Bewertungen
- Oxygen Air Fuel SensorDokument15 SeitenOxygen Air Fuel SensormulualemNoch keine Bewertungen
- Getrag Special Tools 6DCT250 (DPS6, DC4) : L K Basic Tool KitDokument4 SeitenGetrag Special Tools 6DCT250 (DPS6, DC4) : L K Basic Tool KitHumberto Cadori Filho100% (1)
- Powertrain & Calibration 101Dokument85 SeitenPowertrain & Calibration 101babermughalNoch keine Bewertungen
- H22A Swap GuideDokument6 SeitenH22A Swap Guideمحمد أفيق اريايف67% (3)
- (123doc) - Toyota-Training-Course-T874-Engine-Control-Systems-Ii-Ch06Dokument8 Seiten(123doc) - Toyota-Training-Course-T874-Engine-Control-Systems-Ii-Ch06Trịnh Võ Phú Cường100% (1)
- 874 Engine Control Systems II Technician Handbook: Single Pump Secondary Air Injection SystemDokument9 Seiten874 Engine Control Systems II Technician Handbook: Single Pump Secondary Air Injection SystemPhan Tien VuongNoch keine Bewertungen
- Automotive Computer Network Repair Diagnostic STDokument3 SeitenAutomotive Computer Network Repair Diagnostic STVides Ayala100% (1)
- Lambda Sensors: Quick and Easy Testing and ReplacementDokument12 SeitenLambda Sensors: Quick and Easy Testing and ReplacementChinh HuuNoch keine Bewertungen
- Can BusDokument16 SeitenCan Bussabtele0% (2)
- Automotive Engine ElectronicsDokument5 SeitenAutomotive Engine Electronicsmachine tunisieNoch keine Bewertungen
- Automotive Electrical SystemsDokument22 SeitenAutomotive Electrical SystemskabiaNoch keine Bewertungen
- KVT Polytechnic,: Automotive ElectronicsDokument10 SeitenKVT Polytechnic,: Automotive ElectronicsMohan Raj DNoch keine Bewertungen
- Sensor Communication Auto MotivesDokument34 SeitenSensor Communication Auto MotivesAkhil Sharma100% (2)
- UNIT 4 Fundamentals of Automotive ElectronicsDokument61 SeitenUNIT 4 Fundamentals of Automotive Electronicsnubla mNoch keine Bewertungen
- ECU Measurement Calibration and Diagnostics BrochureDokument44 SeitenECU Measurement Calibration and Diagnostics Brochureemmaclick100% (2)
- 2010 Toyota Prius Package II Head Unit UpgradeDokument10 Seiten2010 Toyota Prius Package II Head Unit UpgradeMichael HaisleyNoch keine Bewertungen
- PE3 Series ManualDokument149 SeitenPE3 Series Manualdebendra128nitrNoch keine Bewertungen
- NI Tutorial 2732 enDokument5 SeitenNI Tutorial 2732 enmanumanu12Noch keine Bewertungen
- Ecu TestDokument1 SeiteEcu TestMirancea VioNoch keine Bewertungen
- 2022 Auto Wiring DLC TestDokument4 Seiten2022 Auto Wiring DLC TestmilevyoNoch keine Bewertungen
- Automotive Voltage DropDokument5 SeitenAutomotive Voltage Dropashraf.rahim139Noch keine Bewertungen
- The Anatomy of A WaveformDokument46 SeitenThe Anatomy of A Waveformenjpet100% (1)
- 874 - Engine Control Systems IIDokument347 Seiten874 - Engine Control Systems IIRaymond Brady100% (7)
- iHorizon-Enabled Energy Management for Electrified VehiclesVon EverandiHorizon-Enabled Energy Management for Electrified VehiclesNoch keine Bewertungen
- EH3500AC 3 - Workshop - WQEB EN 01 (20151120) 153 164Dokument12 SeitenEH3500AC 3 - Workshop - WQEB EN 01 (20151120) 153 164Omar HajjiNoch keine Bewertungen
- Al Rafedain Marine Services LLC.: Ship / Shore Safety Check-LisDokument5 SeitenAl Rafedain Marine Services LLC.: Ship / Shore Safety Check-LisPavel ViktorNoch keine Bewertungen
- Permanent Magnet Moving Coil InstrumentsDokument3 SeitenPermanent Magnet Moving Coil Instruments1balamanianNoch keine Bewertungen
- Arduino Based Smart Home Automation System PDFDokument5 SeitenArduino Based Smart Home Automation System PDFdna13 A.Noch keine Bewertungen
- Installation Instruction & Maintenance Service Manual: Full Automatic Blood Cell CounterDokument78 SeitenInstallation Instruction & Maintenance Service Manual: Full Automatic Blood Cell CounterevgenyNoch keine Bewertungen
- Features of 80186, 80286, 80386, 80486 and Pentium Family Processors Ee Vi Sem Amit ThakurDokument23 SeitenFeatures of 80186, 80286, 80386, 80486 and Pentium Family Processors Ee Vi Sem Amit Thakuritsanshika555Noch keine Bewertungen
- Quatation 4Dokument11 SeitenQuatation 4Swabir NalbandNoch keine Bewertungen
- COMBIAC0 ACE0 2uc DatasheetDokument4 SeitenCOMBIAC0 ACE0 2uc Datasheetguo WillNoch keine Bewertungen
- Voletin de Servicio GM6Dokument2 SeitenVoletin de Servicio GM6johan parra galeano50% (2)
- PDB Config With GeneratorDokument22 SeitenPDB Config With GeneratornelusabieNoch keine Bewertungen
- Taylor PDFDokument52 SeitenTaylor PDFlandagoNoch keine Bewertungen
- Specification Sheet - 802T-APDokument2 SeitenSpecification Sheet - 802T-APchatur mmiNoch keine Bewertungen
- Service Manual SharpDokument16 SeitenService Manual SharpAndreea AndreaNoch keine Bewertungen
- Risk Assesment LT & EI JobsDokument2 SeitenRisk Assesment LT & EI JobsMudassar MustafaNoch keine Bewertungen
- High Performance, General-Purpose, PID Control TK SeriesDokument24 SeitenHigh Performance, General-Purpose, PID Control TK SeriesPasindu PriyankaraNoch keine Bewertungen
- Product - Catalogue - Mini - Polon AlfaDokument19 SeitenProduct - Catalogue - Mini - Polon AlfaGina VNoch keine Bewertungen
- New Holland L865, Lx865, Lx885, Lx985 Skid Steer Loader Service Repair ManualDokument1.000 SeitenNew Holland L865, Lx865, Lx885, Lx985 Skid Steer Loader Service Repair ManualRev'em uP Channel74% (35)
- Thiesclima - Wind Display LED - 30 05 2023Dokument3 SeitenThiesclima - Wind Display LED - 30 05 2023Роман КарпенкоNoch keine Bewertungen
- P KrwBM01 03 171 04 EST 2022Dokument2 SeitenP KrwBM01 03 171 04 EST 2022Muhammad Farhan SetyawanNoch keine Bewertungen
- Dynojet InstructionsDokument2 SeitenDynojet Instructionschris neelyNoch keine Bewertungen
- LM 2901-LM 2901A-LM 2903-LM 2903A - ComparadorDokument18 SeitenLM 2901-LM 2901A-LM 2903-LM 2903A - ComparadorTiago LeonhardtNoch keine Bewertungen
- proxxon کاتالوگDokument70 Seitenproxxon کاتالوگمرتضی فراهانیNoch keine Bewertungen
- Luminous Eco Watt Neo 1050 InverterDokument3 SeitenLuminous Eco Watt Neo 1050 InverterSanjoms SebastianNoch keine Bewertungen
- No Less Than Legendary: The All-New Toyota Land CruiserDokument2 SeitenNo Less Than Legendary: The All-New Toyota Land CruiserRj Balboa LeriasNoch keine Bewertungen
- Science F3 Chapter 7 Electricity-Paper 2 AnswersDokument1 SeiteScience F3 Chapter 7 Electricity-Paper 2 AnswersRebecca Choong Xin HuiNoch keine Bewertungen
- DSG 03 Series Solenoid Operated Directional ValvesDokument12 SeitenDSG 03 Series Solenoid Operated Directional ValvesSita Rama Raju PNoch keine Bewertungen
- AlptecDokument15 SeitenAlpteczakiNoch keine Bewertungen
- BLDC Resonant PoleDokument8 SeitenBLDC Resonant Poleav5009Noch keine Bewertungen
- Intelidrive Lite FPC DatasheetDokument4 SeitenIntelidrive Lite FPC DatasheetEduardo A PaduanNoch keine Bewertungen
- 0905GB012Dokument69 Seiten0905GB012Mohamed HamadNoch keine Bewertungen