Das könnte Ihnen auch gefallen
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsVon EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsBewertung: 3 von 5 Sternen3/5 (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- PAT Drilling Rig List (PAT)Dokument24 SeitenPAT Drilling Rig List (PAT)Francisco Salvador MondlaneNoch keine Bewertungen
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsVon EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- Bridge Design Checklist Rev01Dokument7 SeitenBridge Design Checklist Rev01ingjcmv67% (3)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Von EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Bewertung: 4.5 von 5 Sternen4.5/5 (3)
- Is 7098 P-1 (1988) PDFDokument21 SeitenIs 7098 P-1 (1988) PDFAmar PatwalNoch keine Bewertungen
- Analog Circuit Design Volume Three: Design Note CollectionVon EverandAnalog Circuit Design Volume Three: Design Note CollectionBewertung: 3 von 5 Sternen3/5 (2)
- Manual Operacion Compresores de AireDokument204 SeitenManual Operacion Compresores de AireHugo RodriguezNoch keine Bewertungen
- Siemens Simoreg KDokument12 SeitenSiemens Simoreg Knafeesdelta175% (4)
- E MAX - E Max Brushless Motor Specs EE July 08Dokument11 SeitenE MAX - E Max Brushless Motor Specs EE July 08ewaigel0% (1)
- Schmitt Inverter Waveform GeneratorDokument40 SeitenSchmitt Inverter Waveform GeneratorsaravananNoch keine Bewertungen
- Sub Station ReportDokument43 SeitenSub Station ReportSithartha SouryaNoch keine Bewertungen
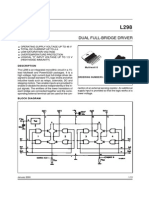
- Data Sheet L298 PDFDokument13 SeitenData Sheet L298 PDFbaymax love spideyNoch keine Bewertungen
- Motor Controller Data SheetDokument13 SeitenMotor Controller Data Sheetapi-284769767Noch keine Bewertungen
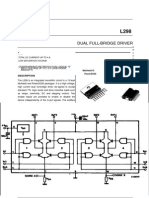
- Datasheet l298Dokument27 SeitenDatasheet l298TikaaDantSNoch keine Bewertungen
- Datasheet l298bDokument14 SeitenDatasheet l298bgioganNoch keine Bewertungen
- Dual Full-Bridge Driver: DescriptionDokument13 SeitenDual Full-Bridge Driver: DescriptionBaher Bassem MorkosNoch keine Bewertungen
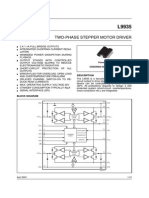
- Two-Phase Stepper Motor Driver: DescriptionDokument19 SeitenTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNoch keine Bewertungen
- LMD18201 3A, 55V H-Bridge: General DescriptionDokument8 SeitenLMD18201 3A, 55V H-Bridge: General DescriptionNairo FilhoNoch keine Bewertungen
- 19 Current ControlDokument5 Seiten19 Current ControlZeshan LatifNoch keine Bewertungen
- UC2842 Philips AN1272 PDFDokument7 SeitenUC2842 Philips AN1272 PDFupali01Noch keine Bewertungen
- Principles Applications ICL7660Dokument10 SeitenPrinciples Applications ICL7660Juan F. RamosNoch keine Bewertungen
- CA3059Dokument9 SeitenCA3059chinametalNoch keine Bewertungen
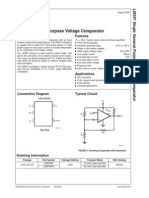
- LM397MF Comparador 6 Pines PDFDokument8 SeitenLM397MF Comparador 6 Pines PDFAndres AlegriaNoch keine Bewertungen
- Voltage Comperator3 LM397Dokument10 SeitenVoltage Comperator3 LM397ΠΑΝΑΓΙΩΤΗΣΠΑΝΑΓΟΣNoch keine Bewertungen
- UC3842 DesignDokument7 SeitenUC3842 DesignCui BapNoch keine Bewertungen
- Semiconductor Technical Data Zero Voltage SwitchDokument6 SeitenSemiconductor Technical Data Zero Voltage SwitchMuresan SanduNoch keine Bewertungen
- Data Sheet: TDA8380ADokument21 SeitenData Sheet: TDA8380Ajvazquez501Noch keine Bewertungen
- LMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CDokument14 SeitenLMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CIrfan AbbasiNoch keine Bewertungen
- ME 455/555 - Lab 2 - 555 TimersDokument10 SeitenME 455/555 - Lab 2 - 555 TimersGustavo KernNoch keine Bewertungen
- VNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverDokument26 SeitenVNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverIan LuksNoch keine Bewertungen
- Transition-Mode PFC Controller: 1 FeaturesDokument17 SeitenTransition-Mode PFC Controller: 1 Featuresadriancho66Noch keine Bewertungen
- Auto Shut OffDokument5 SeitenAuto Shut OffJuan Manuel Han MacNoch keine Bewertungen
- Mach Cong Suat Cau H - Lmd18200Dokument14 SeitenMach Cong Suat Cau H - Lmd18200hieuhuech1Noch keine Bewertungen
- Blazer 400-800 Service ManualDokument34 SeitenBlazer 400-800 Service ManualdaossaNoch keine Bewertungen
- LTC1073fa DatasheetDokument16 SeitenLTC1073fa DatasheetKushal KshirsagarNoch keine Bewertungen
- Open Loop Phase Control Circuit: DescriptionDokument7 SeitenOpen Loop Phase Control Circuit: DescriptionMuhammad NajibNoch keine Bewertungen
- Electronics Lab ManualDokument92 SeitenElectronics Lab ManualVolodya SmolyakNoch keine Bewertungen
- LM392Dokument6 SeitenLM392Brzata PticaNoch keine Bewertungen
- LM311Dokument23 SeitenLM311Brzata PticaNoch keine Bewertungen
- Act 4065Dokument9 SeitenAct 4065bob75Noch keine Bewertungen
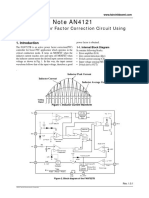
- Application Note AN4121: Design of Power Factor Correction Circuit Using FAN7527BDokument22 SeitenApplication Note AN4121: Design of Power Factor Correction Circuit Using FAN7527BRicardo VieiraNoch keine Bewertungen
- Mini Project DocumentationDokument34 SeitenMini Project DocumentationSri Krishna RakeshNoch keine Bewertungen
- Fully Integrated H-Bridge Motor Driver: VNH3SP30Dokument26 SeitenFully Integrated H-Bridge Motor Driver: VNH3SP30Dan EsentherNoch keine Bewertungen
- Ta 8429 HDokument14 SeitenTa 8429 HrikyNoch keine Bewertungen
- Low Cost Current Feedback Phase Control Circuit: DescriptionDokument11 SeitenLow Cost Current Feedback Phase Control Circuit: Descriptiongruja57Noch keine Bewertungen
- Ic Applications Lab NewDokument12 SeitenIc Applications Lab NewSandy RonaldoNoch keine Bewertungen
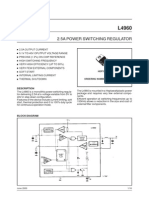
- 2.5A Power Switching Regulator: DescriptionDokument16 Seiten2.5A Power Switching Regulator: Descriptionbikram9830Noch keine Bewertungen
- Adjustable Voltage and Current Regulator: DescriptionDokument12 SeitenAdjustable Voltage and Current Regulator: DescriptionAnghelescu CristinaNoch keine Bewertungen
- Application Note An-985: Six-Output 600V Mgds Simplify 3-Phase Motor DrivesDokument12 SeitenApplication Note An-985: Six-Output 600V Mgds Simplify 3-Phase Motor DrivesTaufik InsaniNoch keine Bewertungen
- Chapter-1 Objective: 1.1 Objective of The ProjectDokument23 SeitenChapter-1 Objective: 1.1 Objective of The ProjectPrashanth CooldudeNoch keine Bewertungen
- LB1845 DDokument9 SeitenLB1845 DFernando LizarragaNoch keine Bewertungen
- LMD 18200Dokument14 SeitenLMD 18200Itzamary Romero SosaNoch keine Bewertungen
- Summer SLS 1103 SyllabusDokument22 SeitenSummer SLS 1103 SyllabusJay100% (1)
- JournalDokument13 SeitenJournalAnonymous 1uwOEpe5w8Noch keine Bewertungen
- Notice: Agency Information Collection Activities Proposals, Submissions, and ApprovalsDokument2 SeitenNotice: Agency Information Collection Activities Proposals, Submissions, and ApprovalsJustia.comNoch keine Bewertungen
- Information: Reading Images - The Grammar of Visual DesignDokument5 SeitenInformation: Reading Images - The Grammar of Visual DesignAndang Prasetya Adiwibawa BernardusNoch keine Bewertungen
- Residential Construction Schedule: Click Here To Create in SmartsheetDokument14 SeitenResidential Construction Schedule: Click Here To Create in SmartsheetVinayak VagheNoch keine Bewertungen
- OPA237Dokument21 SeitenOPA237philprefNoch keine Bewertungen
- Theory of ConstructivismDokument10 SeitenTheory of ConstructivismBulan Ialah KamarulNoch keine Bewertungen
- 2c - Types of Stone, Brick and Block MasonryDokument20 Seiten2c - Types of Stone, Brick and Block MasonryZeeshan ShoukatNoch keine Bewertungen
- Piston and Connecting Rod Assembly TopicsDokument1 SeitePiston and Connecting Rod Assembly TopicsgandhiramNoch keine Bewertungen
- It Implementation-Issues, Opportunities, Challenges, ProblemsDokument9 SeitenIt Implementation-Issues, Opportunities, Challenges, ProblemsAnnonymous963258Noch keine Bewertungen
- Fisher Imprints: Inter-Disciplinary PressDokument8 SeitenFisher Imprints: Inter-Disciplinary PressUndi GunawanNoch keine Bewertungen
- Boston Matrix of CokeDokument11 SeitenBoston Matrix of CokeIrvin A. OsnayaNoch keine Bewertungen
- PanasonicBatteries NI-MH HandbookDokument25 SeitenPanasonicBatteries NI-MH HandbooktlusinNoch keine Bewertungen
- QP Cluster Manager PDFDokument31 SeitenQP Cluster Manager PDFkanisha2014Noch keine Bewertungen
- TripleA RuleBook PDFDokument52 SeitenTripleA RuleBook PDFPete MousseauxNoch keine Bewertungen
- Diffusion of Helium Through QuartzDokument5 SeitenDiffusion of Helium Through QuartzElenaNoch keine Bewertungen
- Ultimate Holding Capacity Drag mx5Dokument1 SeiteUltimate Holding Capacity Drag mx5Luana MarchioriNoch keine Bewertungen
- Justeq07 Product BulletinDokument1 SeiteJusteq07 Product BulletinjusteqNoch keine Bewertungen
- 820-3740 Technical OverviewDokument238 Seiten820-3740 Technical Overviewppjim100% (1)
- Fuel System: Fuel Tank / Fuel Cock 4-1 Fuel Pump 4 - 2 Carburetor 4 - 3Dokument10 SeitenFuel System: Fuel Tank / Fuel Cock 4-1 Fuel Pump 4 - 2 Carburetor 4 - 3Fabrizio FloresNoch keine Bewertungen
- Data Sheet - Pex 240DWDokument8 SeitenData Sheet - Pex 240DWChristine ThompsonNoch keine Bewertungen
- GD200A Manual EnglishDokument269 SeitenGD200A Manual Englishtran dieuNoch keine Bewertungen
- OsiriX JPEG2000Dokument10 SeitenOsiriX JPEG2000Camilo Dario Botero CruzNoch keine Bewertungen
- LCD Interfacing With Microcontroller 8051Dokument50 SeitenLCD Interfacing With Microcontroller 8051Darshan Vala100% (2)