Das könnte Ihnen auch gefallen
- LF01Dokument39 SeitenLF01thisaccountsucksNoch keine Bewertungen
- LICENSEDokument13 SeitenLICENSESum Ting WongNoch keine Bewertungen
- Bearing SelectionDokument8 SeitenBearing SelectionthisaccountsucksNoch keine Bewertungen
- Fuck YouDokument2 SeitenFuck YouthisaccountsucksNoch keine Bewertungen
- Solidworks Student Edition. For Academic Use Only.: Team 236Dokument2 SeitenSolidworks Student Edition. For Academic Use Only.: Team 236thisaccountsucksNoch keine Bewertungen
- Fuck YouDokument2 SeitenFuck YouthisaccountsucksNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Brochure CPR ENDokument8 SeitenBrochure CPR ENMakiberNoch keine Bewertungen
- Emulsion BreakerDokument19 SeitenEmulsion BreakerNovrie50% (2)
- Intro to Process Control Part 3 by Omar Y IsmaelDokument25 SeitenIntro to Process Control Part 3 by Omar Y IsmaelHATAM TALAL ALINoch keine Bewertungen
- Faa Gleim Outlines Instrument PilotDokument130 SeitenFaa Gleim Outlines Instrument PilotTalaat SalehNoch keine Bewertungen
- Philips Flat TV 15PF9936 - LeafletDokument2 SeitenPhilips Flat TV 15PF9936 - LeafletVlad FlorescuNoch keine Bewertungen
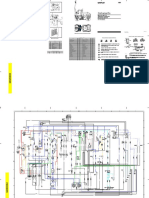
- Electric Schematic CB113 114 QENR2003 PDFDokument2 SeitenElectric Schematic CB113 114 QENR2003 PDFHipac TapicuNoch keine Bewertungen
- Industrial Sliding DoorsDokument40 SeitenIndustrial Sliding DoorsAnonymous CPEha1db7UNoch keine Bewertungen
- Construction EstimateDokument42 SeitenConstruction EstimateAngelica GicomNoch keine Bewertungen
- UOP046-85 Wax Content in Petroleum OilsDokument6 SeitenUOP046-85 Wax Content in Petroleum OilsZiauddeen Noor100% (1)
- Goldcut Manual PDFDokument28 SeitenGoldcut Manual PDFRoxanna SabandoNoch keine Bewertungen
- Stampingjournal20130102 DLDokument36 SeitenStampingjournal20130102 DLWaqar MansoorNoch keine Bewertungen
- 20 Things To Know About The Jeepney Modernization ProgramDokument2 Seiten20 Things To Know About The Jeepney Modernization ProgramMark Julius MaravilloNoch keine Bewertungen
- Central Changing of Triggers in WinCC V6.2 Images (PDL)Dokument10 SeitenCentral Changing of Triggers in WinCC V6.2 Images (PDL)www.otomasyonegitimi.comNoch keine Bewertungen
- MiPs View ManualDokument53 SeitenMiPs View ManualClOudyo VirgílioNoch keine Bewertungen
- Crompton ProjectDokument110 SeitenCrompton Projectarunkcmt0% (2)
- Senior Aerospace Defense Engineer in Orlando FL Resume Ken WebbDokument3 SeitenSenior Aerospace Defense Engineer in Orlando FL Resume Ken WebbKenWebbNoch keine Bewertungen
- DLC3 Yaris 2016Dokument3 SeitenDLC3 Yaris 2016kurnia wanNoch keine Bewertungen
- 11 - Desain, Prototipe Dan KonstruksiDokument46 Seiten11 - Desain, Prototipe Dan KonstruksiUtari Via VivianNoch keine Bewertungen
- Hospital Management SystemDokument63 SeitenHospital Management Systemsanjay yadavNoch keine Bewertungen
- Gas SpringsDokument122 SeitenGas SpringsslavcecaciNoch keine Bewertungen
- Richard GrisenthwaiteDokument25 SeitenRichard GrisenthwaitecaarthiyayiniNoch keine Bewertungen
- NFC 17102 - Lightning Protection - Protection of Structures and Open Areas Against Lightning Using Early Streamer Emission Air TerminalsDokument58 SeitenNFC 17102 - Lightning Protection - Protection of Structures and Open Areas Against Lightning Using Early Streamer Emission Air TerminalsLEONARDONoch keine Bewertungen
- Hawker TOLD CardsDokument20 SeitenHawker TOLD Cardsapi-3803613100% (1)
- Determine Floating Body StabilityDokument11 SeitenDetermine Floating Body StabilityDember Paul100% (1)
- Basics of GD&T TrainingDokument3 SeitenBasics of GD&T TrainingShajil SNoch keine Bewertungen
- ABB MNS System GuideDokument34 SeitenABB MNS System GuideLeslie HallNoch keine Bewertungen
- Digital VLSI System Design Prof. Dr. S. Ramachandran Department of Electrical Engineering Indian Institute of Technology, MadrasDokument30 SeitenDigital VLSI System Design Prof. Dr. S. Ramachandran Department of Electrical Engineering Indian Institute of Technology, MadrasPronadeep BoraNoch keine Bewertungen
- Acer Aspire 4735z 4736z 4935z 4936z - COMPAL LA-5272P KALG1 - REV 0.1secDokument46 SeitenAcer Aspire 4735z 4736z 4935z 4936z - COMPAL LA-5272P KALG1 - REV 0.1secIhsan Yusoff IhsanNoch keine Bewertungen
- Comp Notes 122 PDFDokument57 SeitenComp Notes 122 PDFmuhammad wisalNoch keine Bewertungen
- 2D Vs 3D ReviewDokument7 Seiten2D Vs 3D ReviewBhasker RamagiriNoch keine Bewertungen