Das könnte Ihnen auch gefallen
- Stiffness Part 1Dokument8 SeitenStiffness Part 1Abhi Es100% (1)
- Week 8 SolidDokument23 SeitenWeek 8 SolidMohaiminul Islam TalhaNoch keine Bewertungen
- Fatigue Damage On Steel Space Truss Systems: Mizam DOGANDokument8 SeitenFatigue Damage On Steel Space Truss Systems: Mizam DOGANNjuh PolkiNoch keine Bewertungen
- Introduction To The Engineering Properties of SteelsDokument19 SeitenIntroduction To The Engineering Properties of SteelsMihajloDjurdjevicNoch keine Bewertungen
- Nonlinear Dynamic Analysis of Base Isolated Structures: An OverviewDokument12 SeitenNonlinear Dynamic Analysis of Base Isolated Structures: An OverviewlouhibiNoch keine Bewertungen
- Cyclic Loading AdalahDokument13 SeitenCyclic Loading AdalahsyaniliffaNoch keine Bewertungen
- Stiffness Part 3Dokument35 SeitenStiffness Part 3Abhi EsNoch keine Bewertungen
- Mechanical Behavior of Precipitation Hardened Aluminum Alloys WeldsDokument26 SeitenMechanical Behavior of Precipitation Hardened Aluminum Alloys WeldsKhin Aung ShweNoch keine Bewertungen
- Assignment 3 - Mechanical VibrationDokument6 SeitenAssignment 3 - Mechanical Vibrationbaba sugarNoch keine Bewertungen
- Suppressing Boring Bar Vibrations by Parametric ExDokument9 SeitenSuppressing Boring Bar Vibrations by Parametric Exgakada prbNoch keine Bewertungen
- Antivibration Rubber PartsDokument10 SeitenAntivibration Rubber PartsRajaSekarsajjaNoch keine Bewertungen
- Machine Tool Structures PDFDokument10 SeitenMachine Tool Structures PDFMohan Nanjan S50% (2)
- Earthquake Resistant Design of Steel StructuresDokument12 SeitenEarthquake Resistant Design of Steel StructuresFranklin GarciaNoch keine Bewertungen
- Effects of system elements on shaft voltages and bearing currentsDokument8 SeitenEffects of system elements on shaft voltages and bearing currentshamidrezaNoch keine Bewertungen
- Engineering Materials and Metallurgy Notes PDFDokument0 SeitenEngineering Materials and Metallurgy Notes PDFSenthilkumar Subbiah50% (2)
- Machine Tool StructuresDokument10 SeitenMachine Tool StructuresLowry GuettaNoch keine Bewertungen
- (Adirek Baisukhan) Sequential Effects of Deep Rolling and Post-Weld (Al 7075 Properties)Dokument19 Seiten(Adirek Baisukhan) Sequential Effects of Deep Rolling and Post-Weld (Al 7075 Properties)Muhammad Fa'iq Al BaihaqiNoch keine Bewertungen
- Yield (Engineering) PDFDokument9 SeitenYield (Engineering) PDFariyosageNoch keine Bewertungen
- C Yyyy Yy Yy Yy Yy Y Y: Yyy YyyyyyyyyyyyyyDokument5 SeitenC Yyyy Yy Yy Yy Yy Y Y: Yyy YyyyyyyyyyyyyyMadan MaharanaNoch keine Bewertungen
- Thesis On Metal CuttingDokument7 SeitenThesis On Metal Cuttingaflodtsecumyed100% (1)
- Effect of Lateral Torsional Buckling On Web Tapered I-Beams: CR CR CR DDokument10 SeitenEffect of Lateral Torsional Buckling On Web Tapered I-Beams: CR CR CR DSubhash NaiduNoch keine Bewertungen
- Space Structures Principles and PracticeDokument8 SeitenSpace Structures Principles and PracticeBoby culiusNoch keine Bewertungen
- Structural Automotive App enDokument11 SeitenStructural Automotive App enStein ChenNoch keine Bewertungen
- Shaft DesignDokument7 SeitenShaft DesignAhmet GelisliNoch keine Bewertungen
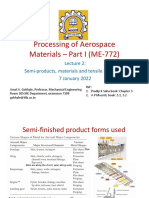
- Processing of Aerospace Materials - Part I (ME-772) : Semi-Products, Materials and Tensile Properties 7 January 2022Dokument19 SeitenProcessing of Aerospace Materials - Part I (ME-772) : Semi-Products, Materials and Tensile Properties 7 January 2022B RITHIKANoch keine Bewertungen
- Apendice C PDFDokument19 SeitenApendice C PDFRoosevelt Mamani QuispeNoch keine Bewertungen
- Frame Analysis with & without Axial DeformationsDokument31 SeitenFrame Analysis with & without Axial DeformationsAndy OretaNoch keine Bewertungen
- Structural Integrity Analysis 3. Mechanical PropertiesDokument23 SeitenStructural Integrity Analysis 3. Mechanical PropertiesbountymaniNoch keine Bewertungen
- Mechanical Properties of MetalsDokument13 SeitenMechanical Properties of MetalsIvyy Joyce BuanNoch keine Bewertungen
- Technical Tidbits July-August 2005 - Tensile Strength ConsiderationsDokument2 SeitenTechnical Tidbits July-August 2005 - Tensile Strength ConsiderationsLee Koon PengNoch keine Bewertungen
- Materials Science: Fatigue AnalysisDokument3 SeitenMaterials Science: Fatigue AnalysisIshwarya SrikanthNoch keine Bewertungen
- Materials Science: Fatigue LifeDokument3 SeitenMaterials Science: Fatigue LifeIshwarya SrikanthNoch keine Bewertungen
- Optimized Skid Design for Compressor PackagesDokument9 SeitenOptimized Skid Design for Compressor PackagesjdfdfererNoch keine Bewertungen
- 01028393Dokument9 Seiten01028393Powerranger2.0Noch keine Bewertungen
- Materials 12 03510 v3Dokument19 SeitenMaterials 12 03510 v3Juan AlvesNoch keine Bewertungen
- Fatigue Failure: Design Basis Loads and QualificationDokument13 SeitenFatigue Failure: Design Basis Loads and QualificationTalat Bin ZamanNoch keine Bewertungen
- What Are Stiffness ModifiersDokument5 SeitenWhat Are Stiffness ModifierssashibooshanNoch keine Bewertungen
- Isolators For NVMDokument18 SeitenIsolators For NVMSaad KhanNoch keine Bewertungen
- Chapter 3: Tensile TestingDokument10 SeitenChapter 3: Tensile TestingKhairul MuzafarNoch keine Bewertungen
- Formability of Al Alloys - A ReviewDokument26 SeitenFormability of Al Alloys - A ReviewVigneshwaran Soundararaja perumal100% (1)
- Ductility and Strength Reduction Factors For DegradingDokument7 SeitenDuctility and Strength Reduction Factors For DegradingtaosyeNoch keine Bewertungen
- CH 6 Mechanical Design NotesDokument19 SeitenCH 6 Mechanical Design NotesMohammed Al-salehNoch keine Bewertungen
- Building AnalysisDokument25 SeitenBuilding Analysisadi_nicuNoch keine Bewertungen
- Investigation Into The Effect of Tool-Chip Contact Length OnDokument5 SeitenInvestigation Into The Effect of Tool-Chip Contact Length OnAbid HussainNoch keine Bewertungen
- Mechanical Design-Material PropertiesDokument61 SeitenMechanical Design-Material Propertiesgaza001Noch keine Bewertungen
- Modelling of Frictional Joints in Dynamically LoadDokument26 SeitenModelling of Frictional Joints in Dynamically LoadAaron GalvezNoch keine Bewertungen
- Electrical Insulated TPI WL 43-1189 2 de enDokument14 SeitenElectrical Insulated TPI WL 43-1189 2 de enRodrigo Jechéla BarriosNoch keine Bewertungen
- Lateral Force Resisting Mechanisms in Slab-Column Connections: An Analytical ApproachDokument11 SeitenLateral Force Resisting Mechanisms in Slab-Column Connections: An Analytical Approachkrishnarao krishnarao329Noch keine Bewertungen
- RJ - METAL FORMING PROCESS - NotesDokument16 SeitenRJ - METAL FORMING PROCESS - NotesAnshul YadavNoch keine Bewertungen
- Active Magnetic Bearings For Machining ApplicationsDokument7 SeitenActive Magnetic Bearings For Machining ApplicationsMustafa Tajkhan100% (1)
- Experimental Study of Residual Stresses in Thick Steel PlatesDokument18 SeitenExperimental Study of Residual Stresses in Thick Steel Plateshassnain iqbalNoch keine Bewertungen
- Reinforced Concrete Buildings: Behavior and DesignVon EverandReinforced Concrete Buildings: Behavior and DesignBewertung: 5 von 5 Sternen5/5 (1)
- Engineering Vibroacoustic Analysis: Methods and ApplicationsVon EverandEngineering Vibroacoustic Analysis: Methods and ApplicationsStephen A. HambricNoch keine Bewertungen
- Corrosion and its Consequences for Reinforced Concrete StructuresVon EverandCorrosion and its Consequences for Reinforced Concrete StructuresNoch keine Bewertungen
- Dynamic Damage and FragmentationVon EverandDynamic Damage and FragmentationDavid Edward LambertNoch keine Bewertungen
- Materials Data for Cyclic Loading: Aluminium and Titanium AlloysVon EverandMaterials Data for Cyclic Loading: Aluminium and Titanium AlloysBewertung: 1 von 5 Sternen1/5 (1)
- Conversion Dureza HLD HB HCDokument1 SeiteConversion Dureza HLD HB HCdaniel moreno jassoNoch keine Bewertungen
- Equotip Using Equotip Support Rings E 2012.11.29Dokument2 SeitenEquotip Using Equotip Support Rings E 2012.11.29Александар ВујаковићNoch keine Bewertungen
- Mahophilipscnc432v70 PDFDokument3 SeitenMahophilipscnc432v70 PDFDraganNoch keine Bewertungen
- Testing Lathe For AccuracyDokument4 SeitenTesting Lathe For AccuracyArnieTNoch keine Bewertungen
- Gears Cutting and GrindingDokument8 SeitenGears Cutting and GrindingАлександар ВујаковићNoch keine Bewertungen
- L071ME4182DFADokument81 SeitenL071ME4182DFAmegamech23Noch keine Bewertungen
- Seminar WorkDokument21 SeitenSeminar WorkАлександар ВујаковићNoch keine Bewertungen
- Testing Machine Tools by Schlesinger Principle - Lathe Machine TestDokument6 SeitenTesting Machine Tools by Schlesinger Principle - Lathe Machine TestАлександар ВујаковићNoch keine Bewertungen
- Functional Structure - With ExamplesDokument2 SeitenFunctional Structure - With ExamplesАлександар ВујаковићNoch keine Bewertungen
- Gears Cutting and GrindingDokument8 SeitenGears Cutting and GrindingАлександар ВујаковићNoch keine Bewertungen
- New Developments in Gear HobbingDokument8 SeitenNew Developments in Gear HobbingpongerkeNoch keine Bewertungen
- Rivin Chapter 1Dokument24 SeitenRivin Chapter 1Александар ВујаковићNoch keine Bewertungen
- FellowsDokument8 SeitenFellowsАлександар ВујаковићNoch keine Bewertungen
- New Developments in Gear HobbingDokument8 SeitenNew Developments in Gear HobbingpongerkeNoch keine Bewertungen
- Rivin Chapter 1Dokument24 SeitenRivin Chapter 1Александар ВујаковићNoch keine Bewertungen
- Altintas Selected ContentDokument14 SeitenAltintas Selected ContentАлександар ВујаковићNoch keine Bewertungen
- Rezanje FORMULEDokument13 SeitenRezanje FORMULEАлександар ВујаковићNoch keine Bewertungen