Das könnte Ihnen auch gefallen
- Windows Form Program of Simple CalculatorDokument4 SeitenWindows Form Program of Simple CalculatorNarendra KamathNoch keine Bewertungen
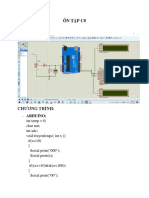
- ÔN TẬP CDokument16 SeitenÔN TẬP CXUAN MINH DINHNoch keine Bewertungen
- C# Unit 1 Prac - 5017Dokument30 SeitenC# Unit 1 Prac - 5017Kunal AhujaNoch keine Bewertungen
- Calculadora Win Form CDokument5 SeitenCalculadora Win Form ClupalominoNoch keine Bewertungen
- Assignment 2: Name: Reg #: Subject: SourceDokument7 SeitenAssignment 2: Name: Reg #: Subject: SourceQassim AbbasiNoch keine Bewertungen
- Calculator CodingDokument9 SeitenCalculator Codingdurga_prasad11511Noch keine Bewertungen
- Banana KongDokument4 SeitenBanana KongDuke TogoNoch keine Bewertungen
- Calculator CodeDokument3 SeitenCalculator CodekevstryfryNoch keine Bewertungen
- Forma 1:: Using Using Using Using Using Using Using Using Namespace Public Partial Class PublicDokument5 SeitenForma 1:: Using Using Using Using Using Using Using Using Namespace Public Partial Class Publicjezda034Noch keine Bewertungen
- Code LTGDDokument24 SeitenCode LTGDDuong PhanNoch keine Bewertungen
- Programa C# DSPDokument4 SeitenPrograma C# DSPOmar CirineoNoch keine Bewertungen
- Using Using Using Using Using Using Using Using Using Using Namespace Public Partial Class PublicDokument3 SeitenUsing Using Using Using Using Using Using Using Using Using Namespace Public Partial Class PublicACitra AlmaRezzaNoch keine Bewertungen
- Shape Visual Studio and ArduinoDokument5 SeitenShape Visual Studio and ArduinoRegidor PetilunaNoch keine Bewertungen
- Calcula Dora Basic ADokument4 SeitenCalcula Dora Basic AAleix Collado SerranoNoch keine Bewertungen
- Calc 5Dokument4 SeitenCalc 5amahaNoch keine Bewertungen
- Using Using Using Using Using Using Using Namespace Public Partial Class Public String Public Bool PublicDokument12 SeitenUsing Using Using Using Using Using Using Namespace Public Partial Class Public String Public Bool PublicuzakcilNoch keine Bewertungen
- UAS Pemrograman - GIOVANI CHRISANTUS - 20F10005Dokument6 SeitenUAS Pemrograman - GIOVANI CHRISANTUS - 20F10005Aldi AdityaNoch keine Bewertungen
- KalkulyatorDokument3 SeitenKalkulyatorRamiz BabayevNoch keine Bewertungen
- Program: / Downserver - Java / Import Java - Rmi.Dokument83 SeitenProgram: / Downserver - Java / Import Java - Rmi.Mathi SankarNoch keine Bewertungen
- Using SystemDokument3 SeitenUsing Systemtiensktdk1Noch keine Bewertungen
- Using Using Using Using Using Using Using Using Using Namespace Public Partial ClassDokument10 SeitenUsing Using Using Using Using Using Using Using Using Namespace Public Partial ClassChiragKavarNoch keine Bewertungen
- Lab AssignmentDokument12 SeitenLab AssignmentsinanahmedofficalNoch keine Bewertungen
- Interfaz Graficay CodigosDokument20 SeitenInterfaz Graficay CodigosMarcos Ramos EstebanNoch keine Bewertungen
- Comp 121 Computer Programming II: Laboratory Manual inDokument15 SeitenComp 121 Computer Programming II: Laboratory Manual inRodjean SimballaNoch keine Bewertungen
- Awp 1-3Dokument43 SeitenAwp 1-3asdNoch keine Bewertungen
- Loop Eventargs: "Number Should Be Greater Than 1"Dokument2 SeitenLoop Eventargs: "Number Should Be Greater Than 1"arsheeNoch keine Bewertungen
- Asignatura: Programación IIDokument12 SeitenAsignatura: Programación IIKelvin AriasNoch keine Bewertungen
- Nhóm 10 Quách Văn HùngDokument14 SeitenNhóm 10 Quách Văn Hùngquachhung06082002Noch keine Bewertungen
- Programas en Windows FormsDokument4 SeitenProgramas en Windows FormsRino AriasNoch keine Bewertungen
- Increase Form: "User32.Dll" "Releasecapture"Dokument5 SeitenIncrease Form: "User32.Dll" "Releasecapture"Rayleigh 05Noch keine Bewertungen
- Experiment-1: Write A Program Using Function Overloading To Swap Two Integer Numbers and Two Float NumbersDokument17 SeitenExperiment-1: Write A Program Using Function Overloading To Swap Two Integer Numbers and Two Float NumbersVarun VaidNoch keine Bewertungen
- Task 1: Faiqa Mehboob BSE-2016-O32Dokument10 SeitenTask 1: Faiqa Mehboob BSE-2016-O32Faiqa mehboobNoch keine Bewertungen
- 21-Tô Thành Hậu - 22110319Dokument17 Seiten21-Tô Thành Hậu - 22110319tthau2004bd77Noch keine Bewertungen
- Enunciado 2Dokument31 SeitenEnunciado 2darlaguerrer675Noch keine Bewertungen
- Acarreo: Using Using Using Using Using Using Using Using Using Namespace Public Partial Class PublicDokument10 SeitenAcarreo: Using Using Using Using Using Using Using Using Using Namespace Public Partial Class PublicZWilfredo GonzalesNoch keine Bewertungen
- Using Using Using Using Using Using Using Using Using Namespace Public Partial Class PublicDokument1 SeiteUsing Using Using Using Using Using Using Using Using Namespace Public Partial Class PublicNguyễn HậuNoch keine Bewertungen
- VP CalculatorDokument11 SeitenVP CalculatorJaveria KhalidNoch keine Bewertungen
- Codigo Using System Using System - Collections.Generic Using System - Data Using System - DiagnosticsDokument5 SeitenCodigo Using System Using System - Collections.Generic Using System - Data Using System - DiagnosticsandersonNoch keine Bewertungen
- Tabula: Namespace ClassDokument5 SeitenTabula: Namespace ClassadamluptakosiceNoch keine Bewertungen
- Calculator C#Dokument4 SeitenCalculator C#zama rud0% (1)
- Codigo Ciclos e InterfazesDokument8 SeitenCodigo Ciclos e InterfazesKevin Santiago PastranaNoch keine Bewertungen
- Record Notebook ManualDokument34 SeitenRecord Notebook ManualRoopaNoch keine Bewertungen
- Tugas Pemrograman Visual P. 3,4 & 6Dokument14 SeitenTugas Pemrograman Visual P. 3,4 & 6Garenk OsburneNoch keine Bewertungen
- (Visual Programming) All CodingsDokument10 Seiten(Visual Programming) All CodingsMalikJawadNoch keine Bewertungen
- C# Zadatci I RjesenjaDokument12 SeitenC# Zadatci I RjesenjaErakNoch keine Bewertungen
- KelengDokument21 SeitenKelengRajamugMurah TangcityshopNoch keine Bewertungen
- McqssDokument281 SeitenMcqssSabahat KhanNoch keine Bewertungen
- Form One:: Using Using Using Using Using Using Using Using Using Using Namespace Public Partial Class NewDokument9 SeitenForm One:: Using Using Using Using Using Using Using Using Using Using Namespace Public Partial Class NewLovely VermaNoch keine Bewertungen
- Da Moe EmployeDokument9 SeitenDa Moe Employeshakeel AsgharNoch keine Bewertungen
- Using Using Using Using Using Using Using Using Using Using Using Using Using Using Using NamespaceDokument5 SeitenUsing Using Using Using Using Using Using Using Using Using Using Using Using Using Using NamespaceNofearmakNoch keine Bewertungen
- Add CompanyDokument20 SeitenAdd CompanyFakhrurrizalNoch keine Bewertungen
- Assignment Windows ApplicationsDokument9 SeitenAssignment Windows ApplicationsAbhishek VanjariNoch keine Bewertungen
- Using Using Using Using Using Using Using Using Using Using Using Using Using Using Using NamespaceDokument5 SeitenUsing Using Using Using Using Using Using Using Using Using Using Using Using Using Using NamespaceNofearmakNoch keine Bewertungen
- 8a - First Windows Form: Using Using Using Using Using Using Using Using Namespace Public Partial Class PublicDokument8 Seiten8a - First Windows Form: Using Using Using Using Using Using Using Using Namespace Public Partial Class PublicBintang DevonneNoch keine Bewertungen
- Event Management System: AbstractDokument34 SeitenEvent Management System: Abstractvenkatsai achiNoch keine Bewertungen
- Rain Alert 999dice For TampermonkeyDokument7 SeitenRain Alert 999dice For TampermonkeyRosimar Sousa100% (1)
- System : UsingDokument10 SeitenSystem : UsingRehan SabirNoch keine Bewertungen
- Nama:Tommy Diri Veto Aginta NIM:8020170268 KELAS:06PT4Dokument3 SeitenNama:Tommy Diri Veto Aginta NIM:8020170268 KELAS:06PT4Anggi Cahaya NirwanaNoch keine Bewertungen
- Projeto Calculadora VigasDokument4 SeitenProjeto Calculadora VigasIgor BorgesNoch keine Bewertungen
- Halo Reach ManualDokument16 SeitenHalo Reach ManualElvis Aaron Garcia HernandezNoch keine Bewertungen
- Virtual RealityDokument32 SeitenVirtual RealityayushaggarwalNoch keine Bewertungen
- The Transistor Tester User Manual (Newly)Dokument7 SeitenThe Transistor Tester User Manual (Newly)Tanel Laanemägi100% (1)
- AutoCad 2000 Command List - 300 ComandosDokument6 SeitenAutoCad 2000 Command List - 300 Comandosdossantos1975100% (2)
- LogicDev LDDokument572 SeitenLogicDev LDJose GonzalezNoch keine Bewertungen
- Ideapad S740Dokument3 SeitenIdeapad S740AhmedNoch keine Bewertungen
- Manual PDFDokument202 SeitenManual PDFPear KnightNoch keine Bewertungen
- Tutorial Shipcon PDFDokument330 SeitenTutorial Shipcon PDFMaiDinh DinhNoch keine Bewertungen
- S7-1200 DataLogging DOC v2d0d1 enDokument53 SeitenS7-1200 DataLogging DOC v2d0d1 enJuan Martin Gutierrez OchoaNoch keine Bewertungen
- A Minor ProjectDokument38 SeitenA Minor ProjectRuhi SaxenaNoch keine Bewertungen
- DX DiagDokument31 SeitenDX DiagGeorge BudauNoch keine Bewertungen
- Apache Tomcat Clustering TuningDokument10 SeitenApache Tomcat Clustering TuningshakyarameshkajiNoch keine Bewertungen
- 2016t EnunciatSD enDokument21 Seiten2016t EnunciatSD enmarioNoch keine Bewertungen
- AdvanCloud - 170710 - Template DevelopmentDokument60 SeitenAdvanCloud - 170710 - Template DevelopmentBrNoch keine Bewertungen
- SIPI - Kasus 15.2Dokument5 SeitenSIPI - Kasus 15.2Rivaldi HankyNoch keine Bewertungen
- White Paper of The Facebook Metaverse Token AboutDokument6 SeitenWhite Paper of The Facebook Metaverse Token AboutProgram kpu jambiNoch keine Bewertungen
- Clinical Neurophysiology PracticeDokument13 SeitenClinical Neurophysiology Practicejacinto isaac galvez cortezNoch keine Bewertungen
- Blockchain For The Internet of Vehicles Towards Intelligent Transportation Systems A SurveyDokument29 SeitenBlockchain For The Internet of Vehicles Towards Intelligent Transportation Systems A SurveyGay GayNoch keine Bewertungen
- (John C Russ) The Image Processing Cookbook (B-Ok - Xyz)Dokument108 Seiten(John C Russ) The Image Processing Cookbook (B-Ok - Xyz)getinetNoch keine Bewertungen
- Bookstack User GuideDokument5 SeitenBookstack User GuideSuman MallaNoch keine Bewertungen
- SafariDokument3 SeitenSafariAntony MervinNoch keine Bewertungen
- Bachelor Thesis: Oslo and Akershus University College of Applied SciencesDokument155 SeitenBachelor Thesis: Oslo and Akershus University College of Applied SciencesexcalidorNoch keine Bewertungen
- eCPRI Intel FPGA IP User Guide: Updated For Intel Quartus Prime Design Suite: 20.3 IP Version: 1.2.0Dokument83 SeiteneCPRI Intel FPGA IP User Guide: Updated For Intel Quartus Prime Design Suite: 20.3 IP Version: 1.2.0nguyentienduy1512Noch keine Bewertungen
- Thoughts - Srinivas Pavan AddankiDokument2 SeitenThoughts - Srinivas Pavan AddankiusamaNoch keine Bewertungen
- ALTIVAR 28 Quick Reference GuideDokument1 SeiteALTIVAR 28 Quick Reference Guidesuperpuma86100% (1)
- FKJ BI HK20 Computer EngineeringDokument5 SeitenFKJ BI HK20 Computer EngineeringMarcopolo GohNoch keine Bewertungen
- Hit 7300 TSMNDokument159 SeitenHit 7300 TSMNMohammed Kumayl100% (1)
- User Guide: Technical Guide P12Y/En Ft/D22 Micom P125/P126/P127Dokument110 SeitenUser Guide: Technical Guide P12Y/En Ft/D22 Micom P125/P126/P127Vasudev AgrawalNoch keine Bewertungen
- How To NPM Unistall Unused Packages in Node - Js - by VithalReddy - stackFAME - MediumDokument2 SeitenHow To NPM Unistall Unused Packages in Node - Js - by VithalReddy - stackFAME - MediumcartenaNoch keine Bewertungen
- HTML FormsDokument7 SeitenHTML FormsRabindra BiswalNoch keine Bewertungen