Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Laws of MotionDokument64 SeitenLaws of MotionArnel A. JulatonNoch keine Bewertungen
- Lesson 2 Mathematics Curriculum in The Intermediate GradesDokument15 SeitenLesson 2 Mathematics Curriculum in The Intermediate GradesRose Angel Manaog100% (1)
- Mythi From AndromedaDokument383 SeitenMythi From AndromedaRico MinnerNoch keine Bewertungen
- Antiquity: Middle AgesDokument6 SeitenAntiquity: Middle AgesPABLO DIAZNoch keine Bewertungen
- Feasibility StudyDokument47 SeitenFeasibility StudyCyril Fragata100% (1)
- 'K Is Mentally Ill' The Anatomy of A Factual AccountDokument32 Seiten'K Is Mentally Ill' The Anatomy of A Factual AccountDiego TorresNoch keine Bewertungen
- 2019 May Chronicle AICFDokument27 Seiten2019 May Chronicle AICFRam KrishnaNoch keine Bewertungen
- BMS Technical ManualDokument266 SeitenBMS Technical Manualiago manziNoch keine Bewertungen
- Human Resouse Accounting Nature and Its ApplicationsDokument12 SeitenHuman Resouse Accounting Nature and Its ApplicationsParas JainNoch keine Bewertungen
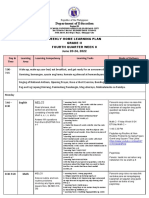
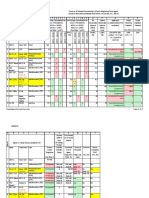
- Department of Education: Weekly Home Learning Plan Grade Ii Fourth Quarter Week 8Dokument8 SeitenDepartment of Education: Weekly Home Learning Plan Grade Ii Fourth Quarter Week 8Evelyn DEL ROSARIONoch keine Bewertungen
- Brain, Behavior, and Immunity: Alok Kumar, David J. LoaneDokument11 SeitenBrain, Behavior, and Immunity: Alok Kumar, David J. LoaneRinaldy TejaNoch keine Bewertungen
- Control SystemsDokument269 SeitenControl SystemsAntonis SiderisNoch keine Bewertungen
- Programming Language Foundations PDFDokument338 SeitenProgramming Language Foundations PDFTOURE100% (2)
- Diemberger CV 2015Dokument6 SeitenDiemberger CV 2015TimNoch keine Bewertungen
- HistoryDokument144 SeitenHistoryranju.lakkidiNoch keine Bewertungen
- Identifying The TopicDokument2 SeitenIdentifying The TopicrioNoch keine Bewertungen
- Standard Deviation IntroductionDokument3 SeitenStandard Deviation IntroductionShyam ShresthaNoch keine Bewertungen
- Tatoo Java Themes PDFDokument5 SeitenTatoo Java Themes PDFMk DirNoch keine Bewertungen
- PharmacologyAnesthesiology RevalidaDokument166 SeitenPharmacologyAnesthesiology RevalidaKENT DANIEL SEGUBIENSE100% (1)
- Modified Release Drug ProductsDokument58 SeitenModified Release Drug Productsmailtorubal2573100% (2)
- 5 Important Methods Used For Studying Comparative EducationDokument35 Seiten5 Important Methods Used For Studying Comparative EducationPatrick Joseph63% (8)
- EE290 Practice 3Dokument4 SeitenEE290 Practice 3olgaNoch keine Bewertungen
- Development of Rsto-01 For Designing The Asphalt Pavements in Usa and Compare With Aashto 1993Dokument14 SeitenDevelopment of Rsto-01 For Designing The Asphalt Pavements in Usa and Compare With Aashto 1993pghasaeiNoch keine Bewertungen
- Exor EPF-1032 DatasheetDokument2 SeitenExor EPF-1032 DatasheetElectromateNoch keine Bewertungen
- Job Description Support Worker Level 1Dokument4 SeitenJob Description Support Worker Level 1Damilola IsahNoch keine Bewertungen
- Clean Agent ComparisonDokument9 SeitenClean Agent ComparisonJohn ANoch keine Bewertungen
- Tender Notice and Invitation To TenderDokument1 SeiteTender Notice and Invitation To TenderWina George MuyundaNoch keine Bewertungen
- Username: Password:: 4193 Votes 9 Days OldDokument6 SeitenUsername: Password:: 4193 Votes 9 Days OldΘώμηΜπουμπαρηNoch keine Bewertungen
- PWC Global Project Management Report SmallDokument40 SeitenPWC Global Project Management Report SmallDaniel MoraNoch keine Bewertungen
- Active and Passive Voice of Future Continuous Tense - Passive Voice Tips-1Dokument5 SeitenActive and Passive Voice of Future Continuous Tense - Passive Voice Tips-1Kamal deep singh SinghNoch keine Bewertungen