Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Chapter 6 Strategy Analysis and Choice: Strategic Management: A Competitive Advantage Approach, 16e (David)Dokument27 SeitenChapter 6 Strategy Analysis and Choice: Strategic Management: A Competitive Advantage Approach, 16e (David)Masum ZamanNoch keine Bewertungen
- Arc Flash Presentation IEEE CED FinalDokument68 SeitenArc Flash Presentation IEEE CED FinalzomglolzscribdNoch keine Bewertungen
- Consulting Engineer - Arc Flash MitigationDokument2 SeitenConsulting Engineer - Arc Flash MitigationtechtricNoch keine Bewertungen
- Short Circuit Current Ratings For Non Fusible Safety SwitchesDokument2 SeitenShort Circuit Current Ratings For Non Fusible Safety SwitchestechtricNoch keine Bewertungen
- E-Frame Circuit Breakers - EDB36050Dokument3 SeitenE-Frame Circuit Breakers - EDB36050techtricNoch keine Bewertungen
- 19138034-Final ProjectDokument25 Seiten19138034-Final ProjectTran Nam PhatNoch keine Bewertungen
- ABB Arc Flash PreventionDokument24 SeitenABB Arc Flash PreventiontechtricNoch keine Bewertungen
- HND6Dokument55 SeitenHND6techtricNoch keine Bewertungen
- HND6Dokument55 SeitenHND6techtricNoch keine Bewertungen
- SHND6 1Dokument161 SeitenSHND6 1techtricNoch keine Bewertungen
- 3 Va 61Dokument1 Seite3 Va 61techtricNoch keine Bewertungen
- Sie Ss Sentron JdgenDokument2 SeitenSie Ss Sentron Jdgenivg8562Noch keine Bewertungen
- Circuit Breaker Interrupting Capacity Short Time Current RatingsDokument23 SeitenCircuit Breaker Interrupting Capacity Short Time Current RatingstechtricNoch keine Bewertungen
- JD&LDDokument56 SeitenJD&LDtechtricNoch keine Bewertungen
- Electric Vehicle Charging Systems Rules 8-106, 8-202, 8-204, 8-206, 8-208, 8-210, 86-300, 86-302, 86-304 and 86-306 Issued May 2022Dokument4 SeitenElectric Vehicle Charging Systems Rules 8-106, 8-202, 8-204, 8-206, 8-208, 8-210, 86-300, 86-302, 86-304 and 86-306 Issued May 2022techtricNoch keine Bewertungen
- AE 250TX and AE 260TX: The Industry Standard For Reliability, Installability and MaintainabilityDokument2 SeitenAE 250TX and AE 260TX: The Industry Standard For Reliability, Installability and MaintainabilitytechtricNoch keine Bewertungen
- PowerPacT P-Frame Molded Case Circuit Breakers - PKA36120Dokument4 SeitenPowerPacT P-Frame Molded Case Circuit Breakers - PKA36120techtricNoch keine Bewertungen
- SHND6 1Dokument161 SeitenSHND6 1techtricNoch keine Bewertungen
- Fault and Split Current For Earthing DesignDokument4 SeitenFault and Split Current For Earthing DesigntechtricNoch keine Bewertungen
- Abb SwitchesDokument112 SeitenAbb SwitchestechtricNoch keine Bewertungen
- Tests in CablesDokument29 SeitenTests in CablesNat ResmesNoch keine Bewertungen
- 2007 Summer Circuit Breaker LubricationDokument4 Seiten2007 Summer Circuit Breaker LubricationtechtricNoch keine Bewertungen
- Arrester Facts 002c - Guide For Selecting An Arrester Field Test MethodDokument14 SeitenArrester Facts 002c - Guide For Selecting An Arrester Field Test MethodMárcio Vieira SilvaNoch keine Bewertungen
- Calculation of Cable Parameters For Different Cable ShapesDokument7 SeitenCalculation of Cable Parameters For Different Cable ShapestechtricNoch keine Bewertungen
- Calculation of Cable Parameters For Different Cable Shapes: AbstractDokument7 SeitenCalculation of Cable Parameters For Different Cable Shapes: AbstractSrëëdhär SriëëNoch keine Bewertungen
- 2010 IASCoordinationDokument131 Seiten2010 IASCoordinationabboali9924100% (1)
- 2010 IASCoordinationDokument131 Seiten2010 IASCoordinationabboali9924100% (1)
- Practical Solution Guide To Arc Flash HazardsDokument143 SeitenPractical Solution Guide To Arc Flash Hazardsabdkha8644100% (6)
- Hydro One Networks Inc DG Technical Interconnection RequirementsDokument210 SeitenHydro One Networks Inc DG Technical Interconnection RequirementstechtricNoch keine Bewertungen
- Hydro One Networks Inc DG Technical Interconnection RequirementsDokument210 SeitenHydro One Networks Inc DG Technical Interconnection RequirementstechtricNoch keine Bewertungen
- LT3845ADokument26 SeitenLT3845Asoft4gsmNoch keine Bewertungen
- Royal British College Dancesport TeamDokument10 SeitenRoyal British College Dancesport TeamAnna rose CabatinganNoch keine Bewertungen
- Ec 0301Dokument25 SeitenEc 0301Silvio RomanNoch keine Bewertungen
- 3.0 Series and Parallel DC CircuitsDokument29 Seiten3.0 Series and Parallel DC CircuitsJinky Loyce RaymundoNoch keine Bewertungen
- Jy992d66901 CDokument6 SeitenJy992d66901 CMaitry ShahNoch keine Bewertungen
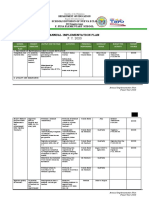
- AIP 2020 FINAL JuneDokument5 SeitenAIP 2020 FINAL JuneVINA ARIETANoch keine Bewertungen
- S4 Computer Sciences Exercises PDFDokument2 SeitenS4 Computer Sciences Exercises PDFHenriette Desanges UwayoNoch keine Bewertungen
- Linux and The Unix PhilosophyDokument182 SeitenLinux and The Unix PhilosophyTran Nam100% (1)
- V13 D03 1 PDFDokument45 SeitenV13 D03 1 PDFFredy Camayo De La CruzNoch keine Bewertungen
- Pre-Paid Customer Churn Prediction Using SPSSDokument18 SeitenPre-Paid Customer Churn Prediction Using SPSSabhi1098Noch keine Bewertungen
- Furniture AnnexDokument6 SeitenFurniture AnnexAlaa HusseinNoch keine Bewertungen
- All Nobel Prizes in LiteratureDokument16 SeitenAll Nobel Prizes in LiteratureMohsin IftikharNoch keine Bewertungen
- Entrepreneurial MotivationDokument18 SeitenEntrepreneurial MotivationRagavendra RagsNoch keine Bewertungen
- EDAG0007Dokument5 SeitenEDAG0007krunalNoch keine Bewertungen
- The Handmaid's TaleDokument40 SeitenThe Handmaid's Taleleher shahNoch keine Bewertungen
- Yu ZbornikDokument511 SeitenYu ZbornikВладимирРакоњацNoch keine Bewertungen
- Present Perfect Simp ContDokument14 SeitenPresent Perfect Simp ContLauGalindo100% (1)
- Chapter 4 Signal Flow GraphDokument34 SeitenChapter 4 Signal Flow GraphAbhishek PattanaikNoch keine Bewertungen
- When SIBO & IBS-Constipation Are Just Unrecognized Thiamine DeficiencyDokument3 SeitenWhen SIBO & IBS-Constipation Are Just Unrecognized Thiamine Deficiencyps piasNoch keine Bewertungen
- Sips 1328Dokument64 SeitenSips 1328Jean Claude De AldánNoch keine Bewertungen
- Setting and Plot: Old YellerDokument8 SeitenSetting and Plot: Old YellerWalid AhmedNoch keine Bewertungen
- Chapter 9Dokument28 SeitenChapter 9Aniket BatraNoch keine Bewertungen
- WoundVite®, The #1 Most Comprehensive Wound, Scar and Post-Surgical Repair Formula Receives Amazon's Choice High RatingsDokument3 SeitenWoundVite®, The #1 Most Comprehensive Wound, Scar and Post-Surgical Repair Formula Receives Amazon's Choice High RatingsPR.comNoch keine Bewertungen
- Exemption in Experience & Turnover CriteriaDokument4 SeitenExemption in Experience & Turnover CriteriaVivek KumarNoch keine Bewertungen
- Details Philippine Qualifications FrameworkDokument6 SeitenDetails Philippine Qualifications FrameworkCeline Pascual-RamosNoch keine Bewertungen
- ASTR 323 Homework 4Dokument2 SeitenASTR 323 Homework 4Andrew IvanovNoch keine Bewertungen
- GR 9 Eng CodebDokument6 SeitenGR 9 Eng CodebSharmista WalterNoch keine Bewertungen
- Request For Proposals/quotationsDokument24 SeitenRequest For Proposals/quotationsKarl Anthony Rigoroso MargateNoch keine Bewertungen
- RESEARCHDokument5 SeitenRESEARCHroseve cabalunaNoch keine Bewertungen