Das könnte Ihnen auch gefallen
- Figure 1 ModelDokument1 SeiteFigure 1 ModelSrdjan KosticNoch keine Bewertungen
- BLST CRTDokument12 SeitenBLST CRTparsa54Noch keine Bewertungen
- (X, Z) (FS, FS) Slip Circle Grid: Max Max Min MaxDokument1 Seite(X, Z) (FS, FS) Slip Circle Grid: Max Max Min MaxSrdjan KosticNoch keine Bewertungen
- ConcreteDokument3 SeitenConcretecuongtran_siegenNoch keine Bewertungen
- Environmental Impact of Blasting at Drenovac Limestone Quarry (Serbia)Dokument16 SeitenEnvironmental Impact of Blasting at Drenovac Limestone Quarry (Serbia)Srdjan KosticNoch keine Bewertungen
- Mice 12014Dokument10 SeitenMice 12014Srdjan KosticNoch keine Bewertungen
- Art:10.1007/s12665 012 1783 ZDokument13 SeitenArt:10.1007/s12665 012 1783 ZSrdjan KosticNoch keine Bewertungen
- Clanak - 65 AutoraDokument5 SeitenClanak - 65 AutoraSrdjan KosticNoch keine Bewertungen
- Creating Personal Web PagesDokument3 SeitenCreating Personal Web PagesSrdjan KosticNoch keine Bewertungen
- Fault creep dynamics under transient forcingDokument7 SeitenFault creep dynamics under transient forcingSrdjan KosticNoch keine Bewertungen
- Protext Install enDokument18 SeitenProtext Install enSrdjan KosticNoch keine Bewertungen
- Traffic Flow Theory: 75 Years of the Fundamental DiagramDokument246 SeitenTraffic Flow Theory: 75 Years of the Fundamental DiagramAlexandra Elena BalanoiuNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Assessing Gross Efficiency and Propelling Efficiency in Swimming Paola Zamparo Department of Neurological Sciences, Faculty of Exercise and Sport Sciences, University of Verona, Verona, ItalyDokument4 SeitenAssessing Gross Efficiency and Propelling Efficiency in Swimming Paola Zamparo Department of Neurological Sciences, Faculty of Exercise and Sport Sciences, University of Verona, Verona, ItalyVijay KumarNoch keine Bewertungen
- Imaging Approach in Acute Abdomen: DR - Parvathy S NairDokument44 SeitenImaging Approach in Acute Abdomen: DR - Parvathy S Nairabidin9Noch keine Bewertungen
- Unit 1 - Introduction To BankingDokument17 SeitenUnit 1 - Introduction To Bankingc08Noch keine Bewertungen
- Victron MultiPlus 48 1200-13-16 Datasheet enDokument1 SeiteVictron MultiPlus 48 1200-13-16 Datasheet enBAHJARI AMINENoch keine Bewertungen
- Ramdump Memshare GPS 2019-04-01 09-39-17 PropsDokument11 SeitenRamdump Memshare GPS 2019-04-01 09-39-17 PropsArdillaNoch keine Bewertungen
- Obligations and Contracts Bar Questions and Answers PhilippinesDokument3 SeitenObligations and Contracts Bar Questions and Answers PhilippinesPearl Aude33% (3)
- 'K Is Mentally Ill' The Anatomy of A Factual AccountDokument32 Seiten'K Is Mentally Ill' The Anatomy of A Factual AccountDiego TorresNoch keine Bewertungen
- Mechanics of Deformable BodiesDokument21 SeitenMechanics of Deformable BodiesVarun. hrNoch keine Bewertungen
- Common Size Analys3esDokument5 SeitenCommon Size Analys3esSaw Mee LowNoch keine Bewertungen
- Equipment, Preparation and TerminologyDokument4 SeitenEquipment, Preparation and TerminologyHeidi SeversonNoch keine Bewertungen
- EnerSys Global Leader in Industrial BatteriesDokument32 SeitenEnerSys Global Leader in Industrial BatteriesAshredNoch keine Bewertungen
- Judge Vest Printable PatternDokument24 SeitenJudge Vest Printable PatternMomNoch keine Bewertungen
- Insize Catalogue 2183,2392Dokument1 SeiteInsize Catalogue 2183,2392calidadcdokepNoch keine Bewertungen
- ExpDokument425 SeitenExpVinay KamatNoch keine Bewertungen
- S2 Retake Practice Exam PDFDokument3 SeitenS2 Retake Practice Exam PDFWinnie MeiNoch keine Bewertungen
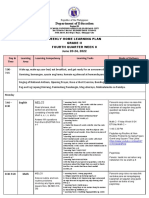
- Department of Education: Weekly Home Learning Plan Grade Ii Fourth Quarter Week 8Dokument8 SeitenDepartment of Education: Weekly Home Learning Plan Grade Ii Fourth Quarter Week 8Evelyn DEL ROSARIONoch keine Bewertungen
- Lecture 1 Family PlanningDokument84 SeitenLecture 1 Family PlanningAlfie Adam Ramillano100% (4)
- April 2017 Jacksonville ReviewDokument40 SeitenApril 2017 Jacksonville ReviewThe Jacksonville ReviewNoch keine Bewertungen
- Ana White - PLANS - A Murphy Bed YOU Can Build, and Afford To Build - 2011-03-03Dokument20 SeitenAna White - PLANS - A Murphy Bed YOU Can Build, and Afford To Build - 2011-03-03Ahmad KamilNoch keine Bewertungen
- IP68 Rating ExplainedDokument12 SeitenIP68 Rating ExplainedAdhi ErlanggaNoch keine Bewertungen
- Expressive Matter Vendor FaqDokument14 SeitenExpressive Matter Vendor FaqRobert LedermanNoch keine Bewertungen
- The Learners Demonstrate An Understanding Of: The Learners Should Be Able To: The Learners Should Be Able ToDokument21 SeitenThe Learners Demonstrate An Understanding Of: The Learners Should Be Able To: The Learners Should Be Able ToBik Bok50% (2)
- Machine Learning: Bilal KhanDokument26 SeitenMachine Learning: Bilal KhanBilal KhanNoch keine Bewertungen
- Sieve Shaker: Instruction ManualDokument4 SeitenSieve Shaker: Instruction ManualinstrutechNoch keine Bewertungen
- Wacker Neuson RTDokument120 SeitenWacker Neuson RTJANUSZ2017100% (4)
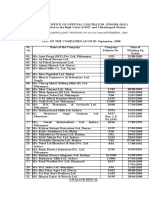
- Statement of Compulsory Winding Up As On 30 SEPTEMBER, 2008Dokument4 SeitenStatement of Compulsory Winding Up As On 30 SEPTEMBER, 2008abchavhan20Noch keine Bewertungen
- Singer NM37 57manualDokument266 SeitenSinger NM37 57manualpaulkoby100% (2)
- Janome DC6030 Sewing Machine Instruction ManualDokument56 SeitenJanome DC6030 Sewing Machine Instruction ManualiliiexpugnansNoch keine Bewertungen
- Honors Biology Unit 2 - Energy Study GuideDokument2 SeitenHonors Biology Unit 2 - Energy Study GuideMark RandolphNoch keine Bewertungen
- SOLVING LINEAR SYSTEMS OF EQUATIONS (40 CHARACTERSDokument3 SeitenSOLVING LINEAR SYSTEMS OF EQUATIONS (40 CHARACTERSwaleedNoch keine Bewertungen