Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- SSIS Package to Extract Data from SharePoint ListDokument107 SeitenSSIS Package to Extract Data from SharePoint ListRamesh PrasadNoch keine Bewertungen
- How To Check UNDO Tablespace UsageDokument8 SeitenHow To Check UNDO Tablespace UsagekrishnaNoch keine Bewertungen
- Technology and Livelihood EducationDokument56 SeitenTechnology and Livelihood EducationDerick B. PicardoNoch keine Bewertungen
- Techlog 2018-2 SynchronizationTool DeploymentGuideDokument20 SeitenTechlog 2018-2 SynchronizationTool DeploymentGuidec_b_umashankarNoch keine Bewertungen
- Ips Data Upload 6 7 0 TSDDokument92 SeitenIps Data Upload 6 7 0 TSDSuresh PandaNoch keine Bewertungen
- Se With AnswersDokument26 SeitenSe With AnswersSushmithaRameshNoch keine Bewertungen
- Group 5 Program-2Dokument2 SeitenGroup 5 Program-2SushmithaRameshNoch keine Bewertungen
- Hemanth M: Program: (Using Run Time Polymorphism)Dokument4 SeitenHemanth M: Program: (Using Run Time Polymorphism)SushmithaRameshNoch keine Bewertungen
- Se 2 MarkssDokument50 SeitenSe 2 MarkssSushmithaRameshNoch keine Bewertungen
- Booth ExampleDokument1 SeiteBooth ExampleRajinder SanwalNoch keine Bewertungen
- Isa IntroductionDokument31 SeitenIsa IntroductionspwajeehNoch keine Bewertungen
- Data Communication and NetworksDokument5 SeitenData Communication and NetworksNusrat Ullah100% (3)
- Lab Guide Coherence WebDokument27 SeitenLab Guide Coherence WebErivelto OliveiraNoch keine Bewertungen
- Physical Addressing - Error Handling PDFDokument14 SeitenPhysical Addressing - Error Handling PDFGopal AgarwalNoch keine Bewertungen
- IBM Tivoli Storage Flashcopy ManagerDokument6 SeitenIBM Tivoli Storage Flashcopy Managergoosie66Noch keine Bewertungen
- 1Z0-047 - Oracle Questions & Answers - Part 2Dokument28 Seiten1Z0-047 - Oracle Questions & Answers - Part 2Shah RashidNoch keine Bewertungen
- Oracle Warehouse BuilderDokument20 SeitenOracle Warehouse BuilderSonychrist ElliotNoch keine Bewertungen
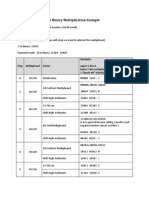
- A Binary Holiday ActivityDokument6 SeitenA Binary Holiday ActivityJJ FajardoNoch keine Bewertungen
- Belajar Mengkonfigurasi Banner, Telnet, SSH, FTP, HTTP and Customizing Account Privileges in JunosDokument6 SeitenBelajar Mengkonfigurasi Banner, Telnet, SSH, FTP, HTTP and Customizing Account Privileges in JunosiwingNoch keine Bewertungen
- Fire h8sDokument78 SeitenFire h8scarver_uaNoch keine Bewertungen
- Xsolaris SPARC To Solaris x86 Porting GuideDokument38 SeitenXsolaris SPARC To Solaris x86 Porting GuidewrwerwerrwerweNoch keine Bewertungen
- CICS WebServices v0.1Dokument18 SeitenCICS WebServices v0.1KESHAVAREDDYNoch keine Bewertungen
- Compatible With MCS®-51 Products - 12K Bytes of In-SystemDokument56 SeitenCompatible With MCS®-51 Products - 12K Bytes of In-Systemwm53Noch keine Bewertungen
- Memory Management: TUTORIALS POINT Simply Easy LearningDokument10 SeitenMemory Management: TUTORIALS POINT Simply Easy LearningSuresh BabuNoch keine Bewertungen
- DBMSDokument373 SeitenDBMSTushar PatelNoch keine Bewertungen
- 01-03 Understanding VXLANsDokument22 Seiten01-03 Understanding VXLANsAbdelhaiNoch keine Bewertungen
- Tools Available To Achieve Site SecurityDokument2 SeitenTools Available To Achieve Site SecurityMuhammad Numan100% (2)
- CISB214 Lab Exercise 3Dokument2 SeitenCISB214 Lab Exercise 3aqilahNoch keine Bewertungen
- Agile PLM Data Mart Data Reference ManualDokument612 SeitenAgile PLM Data Mart Data Reference ManualTirumalesha DadigeNoch keine Bewertungen
- IT and Its Application in Business Sec 3 1 CHG M2Dokument3 SeitenIT and Its Application in Business Sec 3 1 CHG M2saurav kumar rajNoch keine Bewertungen
- Manual PDFDokument376 SeitenManual PDFCarlos Alberto HinojosaNoch keine Bewertungen
- Extract Paragraphs From PDFDokument2 SeitenExtract Paragraphs From PDFTerranceNoch keine Bewertungen
- Firewall Load Balancing1Dokument7 SeitenFirewall Load Balancing1Amit ThakareNoch keine Bewertungen
- Source Code BASCOM AVR Atmega8535Dokument4 SeitenSource Code BASCOM AVR Atmega8535Atim NYNoch keine Bewertungen
- Sql-Basics-Cheat-Sheet-A3 (SQL Carte Mentale Des Requêtes)Dokument1 SeiteSql-Basics-Cheat-Sheet-A3 (SQL Carte Mentale Des Requêtes)Thy HuỳnhNoch keine Bewertungen
- B.SC Computer Applications PDFDokument25 SeitenB.SC Computer Applications PDFManoj KumarNoch keine Bewertungen