Das könnte Ihnen auch gefallen
- In The European Union"Dokument4 SeitenIn The European Union"Sivi Almanaf Ali ShahabNoch keine Bewertungen
- Copy of Personal Data WOW SEA Tahap 3-Versi3Dokument10 SeitenCopy of Personal Data WOW SEA Tahap 3-Versi3Sivi Almanaf Ali ShahabNoch keine Bewertungen
- In The European Union"Dokument4 SeitenIn The European Union"Sivi Almanaf Ali ShahabNoch keine Bewertungen
- 9-Fundamentals of DesignsfDokument44 Seiten9-Fundamentals of DesignsfSivi Almanaf Ali ShahabNoch keine Bewertungen
- Edu 2012 Spring Fsa BooksDokument6 SeitenEdu 2012 Spring Fsa BooksSivi Almanaf Ali ShahabNoch keine Bewertungen
- Nonlinear Models in Option Pricing - An Introduction: Matthias EhrhardtDokument21 SeitenNonlinear Models in Option Pricing - An Introduction: Matthias EhrhardtSivi Almanaf Ali ShahabNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- HD Omni Guide: Downloaded From Manuals Search EngineDokument68 SeitenHD Omni Guide: Downloaded From Manuals Search EngineAbdalhakeem Al turkyNoch keine Bewertungen
- Beamforming in LRPDDokument4 SeitenBeamforming in LRPDdylan LiuNoch keine Bewertungen
- MF TDMA Refernce LinksDokument9 SeitenMF TDMA Refernce LinksSiddharth PurohitNoch keine Bewertungen
- A Circuit-Theoretic Approach To The Design of Quadruple-Mode Broadband Microstrip Patch AntennasDokument5 SeitenA Circuit-Theoretic Approach To The Design of Quadruple-Mode Broadband Microstrip Patch Antennaslee yongzhengNoch keine Bewertungen
- Release RTWlanUDokument8 SeitenRelease RTWlanUSamuel PorkNoch keine Bewertungen
- AME Lab ManualDokument68 SeitenAME Lab ManualNagaraju DevajjiNoch keine Bewertungen
- Ham DMZDokument2 SeitenHam DMZacapwellNoch keine Bewertungen
- Fast EthernetDokument23 SeitenFast EthernetRockfreak DenverNoch keine Bewertungen
- Lesson PlanDokument3 SeitenLesson PlanRathikaPDNoch keine Bewertungen
- What Och OduDokument12 SeitenWhat Och OduxiwayNoch keine Bewertungen
- BE EE 8th Sem TIME RESPONSE ANALYSIS First Order System by Kanchan ThoolDokument10 SeitenBE EE 8th Sem TIME RESPONSE ANALYSIS First Order System by Kanchan ThoolEEE ACEECNoch keine Bewertungen
- Flexi Multiradios - AirScale CB Safety TR 292237-1 Amendment-7Dokument93 SeitenFlexi Multiradios - AirScale CB Safety TR 292237-1 Amendment-7Abdelaziz Boubaker100% (1)
- VCD TechnologyDokument48 SeitenVCD Technologysuresh kumarasiriNoch keine Bewertungen
- Several Requirements For This TopicDokument7 SeitenSeveral Requirements For This TopicmaheshjNoch keine Bewertungen
- ThesisDokument236 SeitenThesisareshiNoch keine Bewertungen
- 09-Demosaicing 2 PDFDokument21 Seiten09-Demosaicing 2 PDFAli SetiawanNoch keine Bewertungen
- Analog Circuits 11Dokument77 SeitenAnalog Circuits 11Kavya MamillaNoch keine Bewertungen
- Ashok Kumar Verma ResumeDokument2 SeitenAshok Kumar Verma ResumeManish ChaturvediNoch keine Bewertungen
- Lab # 4 Time Response AnalysisDokument7 SeitenLab # 4 Time Response AnalysisGökhan YüksekNoch keine Bewertungen
- Signals and Systems: Dr. Shurjeel WyneDokument5 SeitenSignals and Systems: Dr. Shurjeel Wynemarryam nawazNoch keine Bewertungen
- Jandy Aqualink Control SystemDokument2 SeitenJandy Aqualink Control Systemnike_y2kNoch keine Bewertungen
- This Is A Block Diagram of A High-Level AM TransmitterDokument3 SeitenThis Is A Block Diagram of A High-Level AM Transmitterkaushal1977Noch keine Bewertungen
- Advanced Chapter 11 Test EquipmentDokument66 SeitenAdvanced Chapter 11 Test EquipmentSampson MikeNoch keine Bewertungen
- Universal Multiband Amplifiers WWK-911, WWK-921: Iso 9001 CertifiedDokument2 SeitenUniversal Multiband Amplifiers WWK-911, WWK-921: Iso 9001 CertifiedJesus Navas0% (1)
- The FOA Reference Guide To Prem - Hayes, Jim PDFDokument232 SeitenThe FOA Reference Guide To Prem - Hayes, Jim PDFDante Black Phoenix Freeman100% (4)
- Lecture SlideDokument10 SeitenLecture SlideBilal MumtazNoch keine Bewertungen
- WCDMA System Architecture 3G WCDMA Cellular NetworkDokument13 SeitenWCDMA System Architecture 3G WCDMA Cellular NetworkThang TranNoch keine Bewertungen
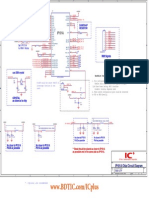
- 50Mhz Clock Out Generate by IP101A: Bandgap ResistorDokument3 Seiten50Mhz Clock Out Generate by IP101A: Bandgap ResistorhungtranNoch keine Bewertungen
- ENGR. Rolando CampillosDokument5 SeitenENGR. Rolando CampillosJohnRichieLTanNoch keine Bewertungen
- Analog Communication Systems (ECE3001) : Dr. Jeetashee Aparajeeta Assistant Professor (SR) SenseDokument90 SeitenAnalog Communication Systems (ECE3001) : Dr. Jeetashee Aparajeeta Assistant Professor (SR) Sensevenki iyreNoch keine Bewertungen