Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Dynamic System Modeling and Analysis With MATLAB and Python For Control Engineers - KimDokument333 SeitenDynamic System Modeling and Analysis With MATLAB and Python For Control Engineers - KimJuan RodriguezNoch keine Bewertungen
- Kalman Filter Tutorial - PresentationDokument65 SeitenKalman Filter Tutorial - Presentationcarlazar100% (2)
- Winning Prediction Analysis in One-Day-International (ODI) Cricket Using Machine Learning TechniquesDokument8 SeitenWinning Prediction Analysis in One-Day-International (ODI) Cricket Using Machine Learning TechniquesInternational Journal Of Emerging Technology and Computer ScienceNoch keine Bewertungen
- Book 2Dokument1.347 SeitenBook 2VahidNoch keine Bewertungen
- Factorization Methods For Discrete Sequential Estimation PDFDokument2 SeitenFactorization Methods For Discrete Sequential Estimation PDFMoniqueNoch keine Bewertungen
- Reference BookDokument3 SeitenReference BookPham ThanhNoch keine Bewertungen
- 10 1 1 135 2929Dokument92 Seiten10 1 1 135 2929Sayandeep SahaNoch keine Bewertungen
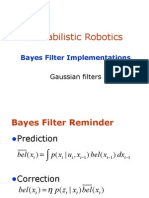
- Probabilistic Robotics: Bayes Filter ImplementationsDokument61 SeitenProbabilistic Robotics: Bayes Filter ImplementationsMatt Brian CapangpanganNoch keine Bewertungen
- Prediction-Based Data Aggregation in WSNsDokument10 SeitenPrediction-Based Data Aggregation in WSNsAhmedAlazzawiNoch keine Bewertungen
- Adaptive Signal ProcessingDokument2 SeitenAdaptive Signal ProcessingDr. Vikas Maheshwari ECENoch keine Bewertungen
- Optimal Integration of GPS With Inertial SensorsDokument161 SeitenOptimal Integration of GPS With Inertial Sensorsgabroo4Noch keine Bewertungen
- Circumventing Dynamic Modeling Evaluation of The Error-State PDFDokument8 SeitenCircumventing Dynamic Modeling Evaluation of The Error-State PDFvaseem akramNoch keine Bewertungen
- Tracking Objects with Kalman and Particle FiltersDokument43 SeitenTracking Objects with Kalman and Particle FiltersAchraf El aouameNoch keine Bewertungen
- A Comparative Analysis of LiDAR SLAM-Based Indoor Navigation For Autonomous VehiclesDokument15 SeitenA Comparative Analysis of LiDAR SLAM-Based Indoor Navigation For Autonomous Vehicles모시원Noch keine Bewertungen
- Object Tracking System Using Camshift Meanshift and Kalman Filter PDFDokument6 SeitenObject Tracking System Using Camshift Meanshift and Kalman Filter PDFashish6789Noch keine Bewertungen
- NPTEL Assignment 1 OptDokument14 SeitenNPTEL Assignment 1 OptSoumyadeep BoseNoch keine Bewertungen
- Basics of Least Squares Adjustment Computation in - 3Dokument6 SeitenBasics of Least Squares Adjustment Computation in - 3putra sahajaNoch keine Bewertungen
- Review Methods for Identifying Structural DynamicsDokument12 SeitenReview Methods for Identifying Structural DynamicsBernardo Diaz SuarezNoch keine Bewertungen
- Lecture 10 PDFDokument10 SeitenLecture 10 PDFEvangelista MaoNoch keine Bewertungen
- Lacey Thacker TutorialDokument10 SeitenLacey Thacker TutorialWilliam Pinto HernándezNoch keine Bewertungen
- A Physics Model Embedded Hybrid Deep Neural Network For DrillstringWashout DetectionDokument9 SeitenA Physics Model Embedded Hybrid Deep Neural Network For DrillstringWashout DetectionSaman AhmadiNoch keine Bewertungen
- Design and Flight Performance of The Orion Prelaunch Navigation SystemDokument12 SeitenDesign and Flight Performance of The Orion Prelaunch Navigation SystemVũ Huy MừngNoch keine Bewertungen
- Chapter 3Dokument22 SeitenChapter 3epsilon8600Noch keine Bewertungen
- PANDA Software and Its Preliminary Result of Positioning and Orbit DeterminationDokument9 SeitenPANDA Software and Its Preliminary Result of Positioning and Orbit DeterminationkiopogmailcomNoch keine Bewertungen
- THAAD-Like High Altitude Theater Missile Defense: Strategic Defense Capability and Certain Countermeasures AnalysisDokument52 SeitenTHAAD-Like High Altitude Theater Missile Defense: Strategic Defense Capability and Certain Countermeasures AnalysisReza IraniNoch keine Bewertungen
- Linear Estimation (T.Kailauth, A. H. Sayed, and B. Hassibi 2000) (Book Review)Dokument6 SeitenLinear Estimation (T.Kailauth, A. H. Sayed, and B. Hassibi 2000) (Book Review)TestingNoch keine Bewertungen
- LQG LTR Controller Design For An Aircraft ModelDokument12 SeitenLQG LTR Controller Design For An Aircraft Modelantex nebyuNoch keine Bewertungen
- Fully Convolutional Neural Networks For Raw Eye Tracking Data Segmentation, Generation, and ReconstructionDokument9 SeitenFully Convolutional Neural Networks For Raw Eye Tracking Data Segmentation, Generation, and ReconstructionGaston VilchesNoch keine Bewertungen
- Passive and Hybrid Control Systems For Seismic Protection of A Benchmark Cable-Stayed BridgeDokument26 SeitenPassive and Hybrid Control Systems For Seismic Protection of A Benchmark Cable-Stayed BridgeflyobamaNoch keine Bewertungen
- Computationally Efficient Methods For Estimating Unknown Input Forces On Structural SystemsDokument8 SeitenComputationally Efficient Methods For Estimating Unknown Input Forces On Structural SystemsTestNoch keine Bewertungen