Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- SynTest Tutorial TSDokument1 SeiteSynTest Tutorial TSkapilhaliNoch keine Bewertungen
- Address Translation, Caches, and TlbsDokument32 SeitenAddress Translation, Caches, and TlbskapilhaliNoch keine Bewertungen
- ThermoMatrix 10K Temperature SensorDokument1 SeiteThermoMatrix 10K Temperature SensorkapilhaliNoch keine Bewertungen
- ECN 003 (Reset Propagation) FigureDokument1 SeiteECN 003 (Reset Propagation) FigurekapilhaliNoch keine Bewertungen
- Elc2013 ClementDokument40 SeitenElc2013 ClementkapilhaliNoch keine Bewertungen
- Tier 1 Investor Guidance 1Dokument45 SeitenTier 1 Investor Guidance 1kapilhaliNoch keine Bewertungen
- Integration of Hardware Cryptography Acceleration On Embedded Systems Under Linux 2.6Dokument6 SeitenIntegration of Hardware Cryptography Acceleration On Embedded Systems Under Linux 2.6kapilhaliNoch keine Bewertungen
- ELM - How To Use An MMCDokument8 SeitenELM - How To Use An MMCkapilhaliNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Civil Site Design V 1700Dokument6 SeitenCivil Site Design V 1700elromxxNoch keine Bewertungen
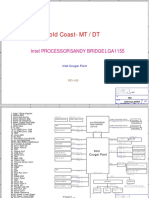
- Dell Optiplex 790 - Gold Coast - MTDT A00 PDFDokument68 SeitenDell Optiplex 790 - Gold Coast - MTDT A00 PDFHung KhoiNoch keine Bewertungen
- Survey of Various Attacks On MANET Based On Layers of Internet ModelDokument3 SeitenSurvey of Various Attacks On MANET Based On Layers of Internet ModelTushar SaxenaNoch keine Bewertungen
- 70-411 R2 Test Bank Lesson 22Dokument11 Seiten70-411 R2 Test Bank Lesson 22Mazaher MohamedaliNoch keine Bewertungen
- System Date: Bios SetupDokument1 SeiteSystem Date: Bios SetupJAMES ALEXANDER ANTONY GOMEZ CORDOVANoch keine Bewertungen
- Information Technology (802) - Class 12 - Lesson 3 - Fundamentals of Java Programming - Part 1Dokument31 SeitenInformation Technology (802) - Class 12 - Lesson 3 - Fundamentals of Java Programming - Part 1Sudhakar RNoch keine Bewertungen
- Etcdctl: Etcd-IoDokument50 SeitenEtcdctl: Etcd-IoRpl MarseilleNoch keine Bewertungen
- CS 523 Advanced Computer Architecture: Introduction To Cache Coherence ProtocolsDokument24 SeitenCS 523 Advanced Computer Architecture: Introduction To Cache Coherence Protocolssona R sonaNoch keine Bewertungen
- VMware Basic PresentationDokument24 SeitenVMware Basic PresentationShyam SundarNoch keine Bewertungen
- AWB-S ManualDokument51 SeitenAWB-S ManualJorge LuisNoch keine Bewertungen
- Chapterwise MCQ With Solutions MarkedDokument65 SeitenChapterwise MCQ With Solutions MarkedMadhu SinghNoch keine Bewertungen
- Inspiron 3048 - Tigris AIO MB - 13048-1Dokument58 SeitenInspiron 3048 - Tigris AIO MB - 13048-1David SimonNoch keine Bewertungen
- Reusable Verification Environment For Verification of Ethernet PDFDokument4 SeitenReusable Verification Environment For Verification of Ethernet PDFRachel GreenNoch keine Bewertungen
- SAP Business Workflow Extended NotificationsDokument23 SeitenSAP Business Workflow Extended NotificationsbilllbolllNoch keine Bewertungen
- Introduction To Computer Programming Exam Final BDokument20 SeitenIntroduction To Computer Programming Exam Final BPencacai KelimaNoch keine Bewertungen
- Gps Tools Guide NetDokument22 SeitenGps Tools Guide NetVilciu ConstantinNoch keine Bewertungen
- Tutorial To Install 3D Aikido PDFDokument2 SeitenTutorial To Install 3D Aikido PDFFJavierGCabreraNoch keine Bewertungen
- Efilm Workstation 32 Users GuideDokument275 SeitenEfilm Workstation 32 Users Guidejhowkins100% (1)
- Vce Private Cloud: 1. Install Winscp and Start ItDokument13 SeitenVce Private Cloud: 1. Install Winscp and Start ItBobNoch keine Bewertungen
- COS 318: Operating Systems Processes and ThreadsDokument69 SeitenCOS 318: Operating Systems Processes and ThreadsAyi AlfredNoch keine Bewertungen
- Bnet Diagnostic OutputDokument57 SeitenBnet Diagnostic OutputFrancisco Emmanuel MunsayacJrIiiNoch keine Bewertungen
- Chapter 3: Hierarchy & Simulation: Digital Design With The Verilog HDLDokument34 SeitenChapter 3: Hierarchy & Simulation: Digital Design With The Verilog HDLVinh ĐứcNoch keine Bewertungen
- Java CalculatorDokument10 SeitenJava CalculatorNONO P STUARTNoch keine Bewertungen
- Attention-Based Smart-Camera For Spatial CognitionDokument10 SeitenAttention-Based Smart-Camera For Spatial CognitionsubramanianNoch keine Bewertungen
- CS112Dokument47 SeitenCS112ChikkuNoch keine Bewertungen
- SOP - EKI-1500 Series - How To Configure USDG Data TCP Mode - 20220524Dokument46 SeitenSOP - EKI-1500 Series - How To Configure USDG Data TCP Mode - 20220524Leandro ConcattoNoch keine Bewertungen
- Powershell Scripting - 2 Manuscripts - Powershell and Wireless Hacking - Logan StylesDokument88 SeitenPowershell Scripting - 2 Manuscripts - Powershell and Wireless Hacking - Logan StylesNandan BishtNoch keine Bewertungen
- Deblocare Telstra Elite MF60Dokument9 SeitenDeblocare Telstra Elite MF60Lungu Claudiu-EmanuelNoch keine Bewertungen
- Fix List For IBM WebSphere Application Server V8Dokument8 SeitenFix List For IBM WebSphere Application Server V8animesh sutradharNoch keine Bewertungen
- Bca 2sem SyDokument10 SeitenBca 2sem SyRounakNoch keine Bewertungen