Das könnte Ihnen auch gefallen
- Hello Web App Internediate ConceptsDokument120 SeitenHello Web App Internediate ConceptsNobin Mathew100% (1)
- Chubby Lock Service Over Distributed NetworkDokument16 SeitenChubby Lock Service Over Distributed NetworklaxmikanthhkNoch keine Bewertungen
- Brocade Understanding Brocade Software Defined Network Controller Achitecture WPDokument8 SeitenBrocade Understanding Brocade Software Defined Network Controller Achitecture WPNobin MathewNoch keine Bewertungen
- Sample Elements of Computer NetworkingDokument34 SeitenSample Elements of Computer NetworkingNobin MathewNoch keine Bewertungen
- Wentzlaff.2007.IEEE Micro - TileraDokument17 SeitenWentzlaff.2007.IEEE Micro - TileraNobin MathewNoch keine Bewertungen
- Wine Chem 101 Part ADokument2 SeitenWine Chem 101 Part ANobin MathewNoch keine Bewertungen
- Native Bees Tetragonula Brochure 2014Dokument2 SeitenNative Bees Tetragonula Brochure 2014Nobin MathewNoch keine Bewertungen
- Nokia 5g Radio Access White PaperDokument16 SeitenNokia 5g Radio Access White PaperNobin Mathew100% (2)
- Cleverdevil Python Metaclasses DemystifiedDokument8 SeitenCleverdevil Python Metaclasses DemystifiedNamit KewatNoch keine Bewertungen
- p275 SolteszDokument13 Seitenp275 SolteszNobin MathewNoch keine Bewertungen
- Distributed SystemsDokument60 SeitenDistributed SystemsNobin MathewNoch keine Bewertungen
- Go BootcampDokument112 SeitenGo BootcampBruce LeeNoch keine Bewertungen
- DBP 309Dokument27 SeitenDBP 309Nobin MathewNoch keine Bewertungen
- Net Lec 7Dokument120 SeitenNet Lec 7Nobin MathewNoch keine Bewertungen
- Jerome-Scale11x LXC TalkDokument51 SeitenJerome-Scale11x LXC TalkNobin MathewNoch keine Bewertungen
- Draft Study Report Potential Around BIADokument43 SeitenDraft Study Report Potential Around BIARamakrishna KamatNoch keine Bewertungen
- PowerInverterJSL2009 SmallerDokument13 SeitenPowerInverterJSL2009 SmallerNobin MathewNoch keine Bewertungen
- Ulb GP ListDokument1 SeiteUlb GP ListNobin MathewNoch keine Bewertungen
- Toyota Corolla 9th Gen Major Technical SpecificationsDokument3 SeitenToyota Corolla 9th Gen Major Technical SpecificationsNick BaptisteNoch keine Bewertungen
- Replace Radio Receiver Assembly in 2004 Toyota CorollaDokument2 SeitenReplace Radio Receiver Assembly in 2004 Toyota Corolladexterconexion1312Noch keine Bewertungen
- Can Technology Fix Medicine? Data-Driven Healthcare's Promise and ChallengesDokument19 SeitenCan Technology Fix Medicine? Data-Driven Healthcare's Promise and ChallengesHélcio Vieira de Souza Jr.Noch keine Bewertungen
- TestDokument1 SeiteTestNobin MathewNoch keine Bewertungen
- DC Conversion Order Explained - Change Land Use from Agriculture to Non-AgricultureDokument4 SeitenDC Conversion Order Explained - Change Land Use from Agriculture to Non-Agriculturelbrmani_123Noch keine Bewertungen
- Jain SDN TutorialDokument90 SeitenJain SDN TutorialNobin Mathew100% (1)
- Openstack-V4 0 PDFDokument35 SeitenOpenstack-V4 0 PDFNobin MathewNoch keine Bewertungen
- Change of Land Use and ConversionDokument1 SeiteChange of Land Use and ConversionNobin MathewNoch keine Bewertungen
- Change of Land Use and ConversionDokument1 SeiteChange of Land Use and ConversionNobin MathewNoch keine Bewertungen
- SC ST Land Act in KarnatakaDokument2 SeitenSC ST Land Act in KarnatakaNobin MathewNoch keine Bewertungen
- Architectural Framework - (Gs - NFV002v010101p)Dokument21 SeitenArchitectural Framework - (Gs - NFV002v010101p)Sebastiano RamettaNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Sony VPC s13xxxDokument18 SeitenSony VPC s13xxxMauro PérezNoch keine Bewertungen
- Extracting Features Using ENVI and ENVI LiDAR PDFDokument26 SeitenExtracting Features Using ENVI and ENVI LiDAR PDFvlady1Noch keine Bewertungen
- S50MC-C8 - 2 Man B&WDokument381 SeitenS50MC-C8 - 2 Man B&WhaizriNoch keine Bewertungen
- Gluc RGTDokument8 SeitenGluc RGTsarah alatasNoch keine Bewertungen
- Design Assumption of Relaxation Losses in Prestressing TendonsDokument13 SeitenDesign Assumption of Relaxation Losses in Prestressing Tendonsimre78_s3069Noch keine Bewertungen
- Muh Eng 50hzDokument8 SeitenMuh Eng 50hzaleks canjugaNoch keine Bewertungen
- CRE Notes 14 Intro To CSTRsDokument11 SeitenCRE Notes 14 Intro To CSTRsYayan IndrayaniNoch keine Bewertungen
- Study of Transparent ConcreteDokument17 SeitenStudy of Transparent ConcreteIrfan KhanNoch keine Bewertungen
- EDX AnalysisDokument18 SeitenEDX AnalysisjosephineNoch keine Bewertungen
- Unit Iii - 80286Dokument44 SeitenUnit Iii - 80286khadarnawasNoch keine Bewertungen
- Test Bank For Finance Applications and Theory 5th Edition by Cornett DownloadDokument54 SeitenTest Bank For Finance Applications and Theory 5th Edition by Cornett Downloadtammiedavilaifomqycpes100% (24)
- 3 Analog (AMPLITUDE MODULATION)Dokument14 Seiten3 Analog (AMPLITUDE MODULATION)FAISAL KHANNoch keine Bewertungen
- Design of Circular Liquid or Gas PipesDokument6 SeitenDesign of Circular Liquid or Gas PipessereutyNoch keine Bewertungen
- Stat Prob Q3 Module 3Dokument29 SeitenStat Prob Q3 Module 3Reign Evans0% (1)
- Rre140 160 180 200 250 H He 2017-2Dokument4 SeitenRre140 160 180 200 250 H He 2017-2OSAMANoch keine Bewertungen
- Revised ListDokument10 SeitenRevised List5paisaNoch keine Bewertungen
- Inheritace 9Dokument36 SeitenInheritace 9Pubg King0% (1)
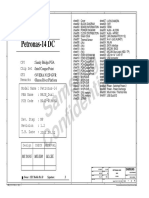
- Samsung Petronas-14DC Board Document with Confidential Schematics and DiagramsDokument52 SeitenSamsung Petronas-14DC Board Document with Confidential Schematics and DiagramsAdriano Miranda BitencourtNoch keine Bewertungen
- The Introduction of Refusal Density Test On Asphalt Mixture DesignDokument8 SeitenThe Introduction of Refusal Density Test On Asphalt Mixture DesignDheeraj senNoch keine Bewertungen
- Halo Carro PDFDokument5 SeitenHalo Carro PDFRege PunkNoch keine Bewertungen
- Bfia Sem 1 SyllabusDokument7 SeitenBfia Sem 1 SyllabusAmity-elearningNoch keine Bewertungen
- Polymer Flooding - IntechOpen - 1629669729888Dokument41 SeitenPolymer Flooding - IntechOpen - 1629669729888Bichara DjimetNoch keine Bewertungen
- Overcurrent Protection of Transmission LinesDokument19 SeitenOvercurrent Protection of Transmission LinesPratham VaghelaNoch keine Bewertungen
- Cemented Sand B E C MIX 23-9Dokument7 SeitenCemented Sand B E C MIX 23-9Mohammed Ghareib NasrNoch keine Bewertungen
- Physics 157 Homework 5 Thermodynamics SkillsDokument5 SeitenPhysics 157 Homework 5 Thermodynamics SkillsSherin HamidNoch keine Bewertungen
- BILL OF QUANTITIES FOR DABHOI-BODELI ROAD WIDENINGDokument61 SeitenBILL OF QUANTITIES FOR DABHOI-BODELI ROAD WIDENINGayman alnossaryNoch keine Bewertungen
- CAPE Chemistry Data BookletDokument5 SeitenCAPE Chemistry Data BookletAnvitha PanyamNoch keine Bewertungen
- Isolated Digit Recognizer Using Gaussian Mixture ModelsDokument44 SeitenIsolated Digit Recognizer Using Gaussian Mixture ModelsAbdelkbir WsNoch keine Bewertungen
- Rotational Motion (Practice Questions PDFDokument46 SeitenRotational Motion (Practice Questions PDFSakshamNoch keine Bewertungen
- BCH 201Dokument77 SeitenBCH 201Obinna OjeNoch keine Bewertungen