Das könnte Ihnen auch gefallen
- Loi de PlanckDokument1 SeiteLoi de PlanckTaha AsNoch keine Bewertungen
- Passin VersantDokument32 SeitenPassin VersantTaha AsNoch keine Bewertungen
- Profil en Long Vol D'oiseauDokument5 SeitenProfil en Long Vol D'oiseauTaha AsNoch keine Bewertungen
- Passin VersantDokument1 SeitePassin VersantTaha AsNoch keine Bewertungen
- PJ AsainnisementDokument1 SeitePJ AsainnisementTaha AsNoch keine Bewertungen
- Lien MilldheatroDokument2 SeitenLien MilldheatroTaha AsNoch keine Bewertungen
- Projet Bassin VersantDokument1 SeiteProjet Bassin VersantTaha AsNoch keine Bewertungen
- Actions Permanentes FavorablesDokument3 SeitenActions Permanentes FavorablesTaha AsNoch keine Bewertungen
- CTN504 Cours 7 PDFDokument32 SeitenCTN504 Cours 7 PDFWalid MatallahNoch keine Bewertungen
- Roi Milln DheatroDokument2 SeitenRoi Milln DheatroTaha AsNoch keine Bewertungen
- Threeo Million DDokument2 SeitenThreeo Million DTaha AsNoch keine Bewertungen
- Threeo Milln DDokument2 SeitenThreeo Milln DTaha AsNoch keine Bewertungen
- Loi MilldheatroDokument2 SeitenLoi MilldheatroTaha AsNoch keine Bewertungen
- Actions PermanentesDokument4 SeitenActions PermanentesTaha AsNoch keine Bewertungen
- Rwo Million DollarsDokument3 SeitenRwo Million DollarsTaha AsNoch keine Bewertungen
- Extreme Solutions of ProtectionDokument3 SeitenExtreme Solutions of ProtectionTaha AsNoch keine Bewertungen
- Ensemble Des Actions Permanentes FavorablesDokument3 SeitenEnsemble Des Actions Permanentes FavorablesTaha AsNoch keine Bewertungen
- coursG2C2 PDFDokument47 SeitencoursG2C2 PDFgarem2005Noch keine Bewertungen
- Different I Elles 2Dokument24 SeitenDifferent I Elles 2Taha AsNoch keine Bewertungen
- IntroauGdel - Enviro Graphiques Pour EtudiantsDokument77 SeitenIntroauGdel - Enviro Graphiques Pour EtudiantsTaha AsNoch keine Bewertungen
- Corrigé - Exo10et11 - 09.12.2010Dokument2 SeitenCorrigé - Exo10et11 - 09.12.2010Taha AsNoch keine Bewertungen
- Approx 2013 TirageDokument23 SeitenApprox 2013 TirageTaha AsNoch keine Bewertungen
- Corrige Tut 3corrige Tut 3corrige Tut 3Dokument7 SeitenCorrige Tut 3corrige Tut 3corrige Tut 3Taha AsNoch keine Bewertungen
- Corrigetp 1 MatlabDokument2 SeitenCorrigetp 1 MatlabTaha AsNoch keine Bewertungen
- AbaqusDokument1 SeiteAbaqusTaha AsNoch keine Bewertungen
- Béton Armé, Principes Et CalculDokument35 SeitenBéton Armé, Principes Et CalculYassine Boulhend0% (1)
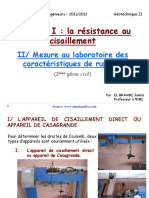
- CH 1 Resistance Au Cisaillement PDFDokument53 SeitenCH 1 Resistance Au Cisaillement PDFTaha As100% (1)
- Formulation Du Beton Methode de DREUX PDFDokument4 SeitenFormulation Du Beton Methode de DREUX PDFTaha AsNoch keine Bewertungen
- Transfo - Mono - s1 Mamadou Taha PDFDokument1 SeiteTransfo - Mono - s1 Mamadou Taha PDFTaha AsNoch keine Bewertungen
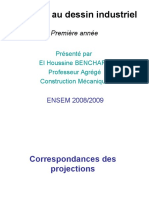
- Initiation Au Dessin Industriel - P1Dokument37 SeitenInitiation Au Dessin Industriel - P1Taha AsNoch keine Bewertungen
- Math S4 PDFDokument8 SeitenMath S4 PDFJiddou MedlaghdhefNoch keine Bewertungen
- Chapitre 3Dokument13 SeitenChapitre 3Shakespeare RahmaNoch keine Bewertungen
- GeometrieDokument61 SeitenGeometrieSaidou SouleyNoch keine Bewertungen
- M202Dokument71 SeitenM202RadiAlounNoch keine Bewertungen
- Espaces Vectoriels RésuméDokument1 SeiteEspaces Vectoriels RésuméMouna BoumezbeurNoch keine Bewertungen
- ArticleDokument37 SeitenArticlesaidNoch keine Bewertungen
- Cours - Structure D'espace VectorielDokument25 SeitenCours - Structure D'espace VectorielMohamed Saad EL ABBADINoch keine Bewertungen
- Algebre LineaireDokument58 SeitenAlgebre LineaireSaliou DiopNoch keine Bewertungen
- Daniel Alibert Cours Et Exercices Corriges Volume 6Dokument154 SeitenDaniel Alibert Cours Et Exercices Corriges Volume 6Gerardo Geusa0% (1)
- Maths Cnaem Ecs2012-2022 - 221025 - 123948Dokument60 SeitenMaths Cnaem Ecs2012-2022 - 221025 - 123948Cat HibaNoch keine Bewertungen
- Espaceaffinealg2 (MIP Et IA)Dokument25 SeitenEspaceaffinealg2 (MIP Et IA)jackfor603Noch keine Bewertungen
- Daniel Alibert - Cours Et Exercices Corrigés - Volume 6Dokument154 SeitenDaniel Alibert - Cours Et Exercices Corrigés - Volume 6walantaNoch keine Bewertungen
- 13 Espace VectorielDokument13 Seiten13 Espace Vectorielالايوبي اسماعيلNoch keine Bewertungen
- ECS 1 Fiche Algèbre LinéaireDokument2 SeitenECS 1 Fiche Algèbre LinéaireAboubakar DiarrassoubaNoch keine Bewertungen
- Espace Vectoriel Application LineaireDokument19 SeitenEspace Vectoriel Application LineaireLamine SarrNoch keine Bewertungen
- MT23-Algebre LineaireDokument259 SeitenMT23-Algebre LineaireSat KoosNoch keine Bewertungen
- 18 Fiche EvDokument2 Seiten18 Fiche EvdededeNoch keine Bewertungen
- Espace VectDokument32 SeitenEspace VectSalma SaadaneNoch keine Bewertungen
- Espaces AffinesDokument4 SeitenEspaces AffinesKhmer ChamNoch keine Bewertungen
- Géométrie AffineDokument68 SeitenGéométrie AffineOussamaLaagali100% (1)
- Examen Septembre C 1 PDFDokument5 SeitenExamen Septembre C 1 PDFBoukalmoune IbrahimNoch keine Bewertungen
- AL 06 22 SerieDokument3 SeitenAL 06 22 SerieMed AkkariNoch keine Bewertungen
- 1741 DGD 4Dokument2 Seiten1741 DGD 4SerigneNoch keine Bewertungen
- DM 9Dokument2 SeitenDM 9abdrahim benaliNoch keine Bewertungen
- A 2016 - MATH. II MP.: Les Candidats Sont Priés de Mentionner de Façon Apparente Sur La Première Page de La CopieDokument5 SeitenA 2016 - MATH. II MP.: Les Candidats Sont Priés de Mentionner de Façon Apparente Sur La Première Page de La CopieAnne GerardNoch keine Bewertungen
- Resume Geometrie AffineDokument8 SeitenResume Geometrie Affine1234t0411Noch keine Bewertungen
- CHAPITRE-2 - Espace VectorielDokument103 SeitenCHAPITRE-2 - Espace VectorielCharaf El kihalNoch keine Bewertungen
- Résumé de Cours - Généralités Sur Les Espaces VectorielsDokument1 SeiteRésumé de Cours - Généralités Sur Les Espaces VectorielsJavis AndersonNoch keine Bewertungen
- Caractérisations Topologiques de La Dimension FinieDokument2 SeitenCaractérisations Topologiques de La Dimension FinieEssaidi AliNoch keine Bewertungen
- Methodes Mathematiques Pour IngenieurDokument433 SeitenMethodes Mathematiques Pour IngenieurJoël Mètogbé Zinsalo100% (1)