Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Slva666 - Flyback TL494Dokument25 SeitenSlva666 - Flyback TL494betodias30Noch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Input Filter Design For SMPSDokument21 SeitenInput Filter Design For SMPSsenkum812002Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- External PNP Transistor CircuitDokument5 SeitenExternal PNP Transistor Circuitefremofe100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Designing With LDO RegulatorsDokument109 SeitenDesigning With LDO RegulatorsEliza KottikaNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- sc120 PDFDokument116 Seitensc120 PDFefremofeNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Slva666 - Flyback TL494Dokument25 SeitenSlva666 - Flyback TL494betodias30Noch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- And8028 DDokument4 SeitenAnd8028 DefremofeNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Mic 29752Dokument40 SeitenMic 29752efremofeNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- TL77xxA SeriesDokument32 SeitenTL77xxA SeriesefremofeNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Us 5790354Dokument6 SeitenUs 5790354efremofeNoch keine Bewertungen
- HP Pdp124pDokument1 SeiteHP Pdp124pefremofe100% (2)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- BSS101Dokument7 SeitenBSS101efremofeNoch keine Bewertungen
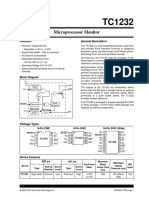
- TC1232Dokument24 SeitenTC1232efremofeNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- TRIAC Relay Contact Protection PDFDokument1 SeiteTRIAC Relay Contact Protection PDFefremofeNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Implementation of High Step-Up Solar Power Optimizer For DC Micro Grid Application PDFDokument5 SeitenImplementation of High Step-Up Solar Power Optimizer For DC Micro Grid Application PDFefremofeNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- TRIAC Relay Contact Protection PDFDokument1 SeiteTRIAC Relay Contact Protection PDFefremofeNoch keine Bewertungen
- 11ak30 Service ModeDokument25 Seiten11ak30 Service Moderom2002Noch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- New Low Cost Lead Resistance Compensation Technique For Resistive Sensors PDFDokument4 SeitenNew Low Cost Lead Resistance Compensation Technique For Resistive Sensors PDFefremofeNoch keine Bewertungen
- IC Power OPAMPs Versatile and Efficient (An)Dokument6 SeitenIC Power OPAMPs Versatile and Efficient (An)efremofeNoch keine Bewertungen
- LLC Converters Application - Note - Resonant LLC Converter Operation and Design - Infineon PDFDokument19 SeitenLLC Converters Application - Note - Resonant LLC Converter Operation and Design - Infineon PDFFabio Pedroso de MoraisNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- New Low Cost Lead Resistance Compensation Technique For Resistive Sensors PDFDokument4 SeitenNew Low Cost Lead Resistance Compensation Technique For Resistive Sensors PDFefremofeNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- High-Efficiency Diode-Clamped Linear AmplifierDokument10 SeitenHigh-Efficiency Diode-Clamped Linear AmplifierefremofeNoch keine Bewertungen
- Coping W Poor Dynamic Performance of Super-Junction MOSFET Body Diodes PDFDokument6 SeitenCoping W Poor Dynamic Performance of Super-Junction MOSFET Body Diodes PDFefremofeNoch keine Bewertungen
- United States Patent: + T VCC CB (15 (16 H0 JVY/I - J:RDokument16 SeitenUnited States Patent: + T VCC CB (15 (16 H0 JVY/I - J:RefremofeNoch keine Bewertungen
- Ep 24889895Dokument7 SeitenEp 24889895efremofeNoch keine Bewertungen
- Ep 24889895Dokument7 SeitenEp 24889895efremofeNoch keine Bewertungen
- Ep 24889895Dokument7 SeitenEp 24889895efremofeNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Ep 24889895Dokument7 SeitenEp 24889895efremofeNoch keine Bewertungen
- Ep 24889895Dokument7 SeitenEp 24889895efremofeNoch keine Bewertungen
- CapacitorDokument5 SeitenCapacitorAina shivhareNoch keine Bewertungen
- Thyssenkrupp Electrical Steel GMBHDokument32 SeitenThyssenkrupp Electrical Steel GMBHRichard SyNoch keine Bewertungen
- Vacuum TubesDokument52 SeitenVacuum TubesJoseGarciaRuiz100% (2)
- A Microcontroller-Based Variable Voltage Variable Frequency Sinusoidal Power Source With A Novel PWM Generation StrategyDokument9 SeitenA Microcontroller-Based Variable Voltage Variable Frequency Sinusoidal Power Source With A Novel PWM Generation Strategyanon_958959832Noch keine Bewertungen
- Lesson 1-17: Identifying Ports: IC Training - Module One: Computing FundamentalsDokument2 SeitenLesson 1-17: Identifying Ports: IC Training - Module One: Computing FundamentalsVinMarNoch keine Bewertungen
- LG Pd92a Chassis 42PQ1100 Plasma TV SM PDFDokument54 SeitenLG Pd92a Chassis 42PQ1100 Plasma TV SM PDFMonete FlorinNoch keine Bewertungen
- Siemens MRI MAGNETOM-World MR-Basics MRI-brochure English 1800000001924325Dokument46 SeitenSiemens MRI MAGNETOM-World MR-Basics MRI-brochure English 1800000001924325Paulo HenriqueNoch keine Bewertungen
- MS-7003 ManualDokument5 SeitenMS-7003 ManualDaniel Pulido RojasNoch keine Bewertungen
- Devices and Communication Buses For Devices NetworkDokument211 SeitenDevices and Communication Buses For Devices NetworkDhrumeet PatelNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- OBD II Pro PlusFordDokument50 SeitenOBD II Pro PlusFordkamaleon doradoNoch keine Bewertungen
- Magnetically Coupled CircuitsDokument21 SeitenMagnetically Coupled CircuitsIftitah ImawatiNoch keine Bewertungen
- Feedback Amplifiers Theory and Design PDFDokument2 SeitenFeedback Amplifiers Theory and Design PDFMikeNoch keine Bewertungen
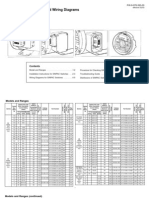
- Installation Instructions and Wiring Diagrams For All Models and RangesDokument8 SeitenInstallation Instructions and Wiring Diagrams For All Models and RangesMaria MusyNoch keine Bewertungen
- G120 CU240BE2 BA6 0414 Eng en-USDokument380 SeitenG120 CU240BE2 BA6 0414 Eng en-USAnonymous xjn66H1Noch keine Bewertungen
- Swing Door Installation ManualDokument28 SeitenSwing Door Installation Manualmararuly biliyantoNoch keine Bewertungen
- Course Assignment Submission Date: 30.09.2021: S.No Full Name ID - No QuestionsDokument2 SeitenCourse Assignment Submission Date: 30.09.2021: S.No Full Name ID - No QuestionsEbisa RefisaNoch keine Bewertungen
- Sidewinder - Current Sensor: Low Frequency Equivalent CircuitDokument3 SeitenSidewinder - Current Sensor: Low Frequency Equivalent CircuitGonzalo RiveraNoch keine Bewertungen
- TKSG-4000 Maintenance-ManualDokument184 SeitenTKSG-4000 Maintenance-ManualConnie Taiba100% (1)
- O Plus Dry Bushings - Technical GuideDokument16 SeitenO Plus Dry Bushings - Technical GuidePABLO BELTRANNoch keine Bewertungen
- NGR Installation GuideDokument10 SeitenNGR Installation Guidemartins73Noch keine Bewertungen
- Airplane Service Manual: PA-31 PA-31-300 PA-31-325Dokument1.105 SeitenAirplane Service Manual: PA-31 PA-31-300 PA-31-325Mantenimiento CMA684Noch keine Bewertungen
- Dse402 Mkii Data SheetDokument2 SeitenDse402 Mkii Data SheetyanNoch keine Bewertungen
- Class-12-Physics-Project-On-Full-Wave-Bridge-Rectifier HELLO123Dokument16 SeitenClass-12-Physics-Project-On-Full-Wave-Bridge-Rectifier HELLO123Aryan Budhathoki100% (1)
- 4.4 LineRunner Products CatalougeDokument12 Seiten4.4 LineRunner Products CatalougeCristiano PortoNoch keine Bewertungen
- Solutions Powerlogic Systems TerminologyDokument6 SeitenSolutions Powerlogic Systems Terminologynikkoelbao96Noch keine Bewertungen
- COntoh Jurnal ProsidingDokument9 SeitenCOntoh Jurnal Prosidingfebrian nandaNoch keine Bewertungen
- Lab.8. DFT and FFT TransformsDokument16 SeitenLab.8. DFT and FFT TransformsTsega TeklewoldNoch keine Bewertungen
- Digital Holography For 3D Display and SensingDokument6 SeitenDigital Holography For 3D Display and SensingSab-Win DamadNoch keine Bewertungen
- Turbocor General Brochure ENGDokument4 SeitenTurbocor General Brochure ENGIEA.BOD.I2 - Sơn, Vũ Văn - Giám đốc E&A - INTECH GROUPNoch keine Bewertungen
- Class 1Dokument126 SeitenClass 1madhu eceNoch keine Bewertungen