Das könnte Ihnen auch gefallen
- Guide to Load Analysis for Durability in Vehicle EngineeringVon EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonBewertung: 4 von 5 Sternen4/5 (1)
- Adams ABS Cosimulation PDFDokument53 SeitenAdams ABS Cosimulation PDFKarthik NagarajNoch keine Bewertungen
- The Multibody Systems Approach to Vehicle DynamicsVon EverandThe Multibody Systems Approach to Vehicle DynamicsBewertung: 5 von 5 Sternen5/5 (2)
- FSAE Design and OptimizationDokument51 SeitenFSAE Design and OptimizationLizHuangNoch keine Bewertungen
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainVon EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainNoch keine Bewertungen
- Development and Analysis of A Multi Link SuspensionDokument100 SeitenDevelopment and Analysis of A Multi Link SuspensionGianLucaNoch keine Bewertungen
- Adams Template Builder TutorialDokument39 SeitenAdams Template Builder Tutorialsultanu89Noch keine Bewertungen
- Car Msc2011Dokument734 SeitenCar Msc2011Renan AlvimNoch keine Bewertungen
- Getting Started Using Adams Car MDR3Dokument138 SeitenGetting Started Using Adams Car MDR3paulkastleNoch keine Bewertungen
- Study of Steering Mechanism MechanicalDokument9 SeitenStudy of Steering Mechanism MechanicalSANURASAGARNoch keine Bewertungen
- The Re-Design and Analysis of The Suspension System On The Formula Student Race CarDokument53 SeitenThe Re-Design and Analysis of The Suspension System On The Formula Student Race CarPabloNoch keine Bewertungen
- Automotive Engineering A Complete Guide - 2020 EditionVon EverandAutomotive Engineering A Complete Guide - 2020 EditionNoch keine Bewertungen
- Exact Constraint (ME Magazine Sep'09)Dokument7 SeitenExact Constraint (ME Magazine Sep'09)aoeusnthidNoch keine Bewertungen
- Claude RouelleDokument2 SeitenClaude RouelleDanielNoch keine Bewertungen
- VDHS-12 Vehicle Dynamics Design ProcessDokument15 SeitenVDHS-12 Vehicle Dynamics Design ProcessHusain Kanchwala100% (1)
- Vehicle Load Transfer PartI - III - 27MAR13Dokument101 SeitenVehicle Load Transfer PartI - III - 27MAR13Bill Harbin100% (1)
- Dynamic Analysis of A Car Chassis PDFDokument5 SeitenDynamic Analysis of A Car Chassis PDFsultanu89Noch keine Bewertungen
- A18 008 Parameterized FMU Using Adams CarDokument22 SeitenA18 008 Parameterized FMU Using Adams Carmikael bezerra cotias dos santos100% (1)
- Rail Vehicle Car Bodies (KTH)Dokument72 SeitenRail Vehicle Car Bodies (KTH)teerasakNoch keine Bewertungen
- Design and Optimization of Formula SAE Suspension SystemDokument27 SeitenDesign and Optimization of Formula SAE Suspension SystemRushik KudaleNoch keine Bewertungen
- A Multi-Link Suspension System PDFDokument8 SeitenA Multi-Link Suspension System PDFmikael bezerra cotias dos santos0% (1)
- Lecture 6 - Modelling and Analysis of The Full VehicleDokument57 SeitenLecture 6 - Modelling and Analysis of The Full Vehiclehotsync101Noch keine Bewertungen
- NVH CAE Concept Modelling and Optimization at BMWDokument23 SeitenNVH CAE Concept Modelling and Optimization at BMWSuyash Thorat-Gadgil100% (1)
- 08a605 Vehicle Design IIDokument3 Seiten08a605 Vehicle Design IIdhana555Noch keine Bewertungen
- Modeling and Control of Quarter-Vehicle Suspension With A Semiactive Actuator, Stamat Stamatov - DissertationDokument335 SeitenModeling and Control of Quarter-Vehicle Suspension With A Semiactive Actuator, Stamat Stamatov - DissertationsstamatovNoch keine Bewertungen
- Car Bibles - The Car Suspension BibleDokument20 SeitenCar Bibles - The Car Suspension BibleAliakbar Saifee100% (1)
- Ergonomics in The Automotive Design Process PDFDokument2 SeitenErgonomics in The Automotive Design Process PDFVictorNoch keine Bewertungen
- Balanced SuspensionDokument13 SeitenBalanced SuspensionRonald GeorgeNoch keine Bewertungen
- Introduction To Chassis DynamicsDokument16 SeitenIntroduction To Chassis DynamicsRajaSekarsajjaNoch keine Bewertungen
- Tire and ModelisationDokument66 SeitenTire and ModelisationChaker AmirNoch keine Bewertungen
- Vehicle Modeling and Adams-SimulinkDokument106 SeitenVehicle Modeling and Adams-SimulinkJony M. TemnikarNoch keine Bewertungen
- Vehicle Dynamics International 2014Dokument68 SeitenVehicle Dynamics International 2014Alaa Eddine RadhNoch keine Bewertungen
- Kinematics and Compliance of Sports Utility VehicleDokument7 SeitenKinematics and Compliance of Sports Utility VehicleInternational Research Journal in Engineering and Emerging Technology100% (1)
- FSAE Tutorial v1.1Dokument17 SeitenFSAE Tutorial v1.1Abhinav GaikwadNoch keine Bewertungen
- Kinematic and Dynamic Analysis of Independent Suspension SystemDokument9 SeitenKinematic and Dynamic Analysis of Independent Suspension Systemsiddhartha180987100% (3)
- Suspension Design ProcedureDokument63 SeitenSuspension Design ProcedurejalanayushNoch keine Bewertungen
- Simulation of Electric Vehcile Super Cap With BatteryDokument33 SeitenSimulation of Electric Vehcile Super Cap With BatteryAmmar Hasan0% (1)
- RL 01 CAE-Durability Analysis of HCV Chassis Using FPM Approach Mahindra EnggDokument9 SeitenRL 01 CAE-Durability Analysis of HCV Chassis Using FPM Approach Mahindra EnggrcpawarNoch keine Bewertungen
- Ravi Resume PDFDokument2 SeitenRavi Resume PDFRavi Prakash M PNoch keine Bewertungen
- Virtualwindtunnel EbookDokument78 SeitenVirtualwindtunnel EbookEfrain Diaz Garcia100% (1)
- Formula Student Adams ModelDokument124 SeitenFormula Student Adams ModelOliver Grimes50% (2)
- Senior Project ReportDokument6 SeitenSenior Project ReportRoss Bunnell100% (1)
- Find Your Roll CenterDokument20 SeitenFind Your Roll CenterchainplatesNoch keine Bewertungen
- Design and Fabricate of An Active Suspension SystemDokument39 SeitenDesign and Fabricate of An Active Suspension SystemEr JohnNoch keine Bewertungen
- Double WishboneDokument6 SeitenDouble WishboneRian SteveNoch keine Bewertungen
- Mechanism For Electric MotorcycleDokument2 SeitenMechanism For Electric MotorcyclenomNoch keine Bewertungen
- Vehicle Suspension Modeling NotesDokument25 SeitenVehicle Suspension Modeling Notesahmetlutfu100% (2)
- Anti-Roll Bar Design and Material Selection For THDokument3 SeitenAnti-Roll Bar Design and Material Selection For TH8794 Dimplekunwar SolankiNoch keine Bewertungen
- Chassis Design, Analysis and Testing of A Formula Sae Car ChassisDokument18 SeitenChassis Design, Analysis and Testing of A Formula Sae Car ChassisSarvesh Kolekar100% (1)
- Getting Started Using AdamsCar Ride - Introducing AdamsCar RideDokument28 SeitenGetting Started Using AdamsCar Ride - Introducing AdamsCar RidecheckblaNoch keine Bewertungen
- Fulltext01 PDFDokument56 SeitenFulltext01 PDFsiddharth deshmukhNoch keine Bewertungen
- Master's in Hybrid Electric Vehicle Design and AnalysisDokument10 SeitenMaster's in Hybrid Electric Vehicle Design and AnalysisGopiNoch keine Bewertungen
- Project Plan MORE Vehicle Regenerative Braking and Torque Vectoring FinalDokument24 SeitenProject Plan MORE Vehicle Regenerative Braking and Torque Vectoring FinalYoussra Enst'Olympiens LaouinaNoch keine Bewertungen
- Full Text 01Dokument86 SeitenFull Text 01sdaniel1979Noch keine Bewertungen
- Bachelor Thesis: Analysis of Vehicle Behavior To Find Criteria For Steering Robot TestsDokument78 SeitenBachelor Thesis: Analysis of Vehicle Behavior To Find Criteria For Steering Robot TestsAmit BakshiNoch keine Bewertungen
- Cae PPT 1.1Dokument11 SeitenCae PPT 1.1om mankarNoch keine Bewertungen
- Front Axle ShaftsDokument12 SeitenFront Axle ShaftsKammoeNoch keine Bewertungen
- Tutorial # 1 Energy and Energy BalanceDokument1 SeiteTutorial # 1 Energy and Energy Balancea mustafaNoch keine Bewertungen
- Pages From Asme Sec Ix 2017-3Dokument1 SeitePages From Asme Sec Ix 2017-3Akhtar AnsariNoch keine Bewertungen
- Ex Study of SprayersDokument3 SeitenEx Study of SprayersGanpat Lal SharmaNoch keine Bewertungen
- Vibration Signature AnalysisDokument16 SeitenVibration Signature Analysisabolfazlkhaki100% (1)
- Epicyclic Gear Train Write UpDokument8 SeitenEpicyclic Gear Train Write UpkulkajinkyaNoch keine Bewertungen
- Lafortune - Et - Al - SMST06 - Superelasticity Related Phenomena of Shape Memory Alloy Passive DampersDokument10 SeitenLafortune - Et - Al - SMST06 - Superelasticity Related Phenomena of Shape Memory Alloy Passive DamperspilafaNoch keine Bewertungen
- 6 X 1 Basicequipment 00Dokument17 Seiten6 X 1 Basicequipment 00Mweene MuukaNoch keine Bewertungen
- Comparison Between Esteem & ManualDokument12 SeitenComparison Between Esteem & ManualalialiNoch keine Bewertungen
- Hydraulic Circuit (PKD/Finned/1 & 2 Floating Rollers)Dokument5 SeitenHydraulic Circuit (PKD/Finned/1 & 2 Floating Rollers)Oscar ItzolNoch keine Bewertungen
- Maintenance Instructions PowerROC T35, T30 and T25Dokument120 SeitenMaintenance Instructions PowerROC T35, T30 and T25defiunikasungti67% (6)
- Phys2 Ch2 Heat Temp Law0Dokument56 SeitenPhys2 Ch2 Heat Temp Law0Trung Trần100% (1)
- Module 2 - DC Motor DrivesDokument61 SeitenModule 2 - DC Motor DrivesMohammad Amirul ShafiqNoch keine Bewertungen
- Design, Construction and Testing of A Poultry Feed Pellet MachineDokument6 SeitenDesign, Construction and Testing of A Poultry Feed Pellet MachineNascimento AlvesNoch keine Bewertungen
- Parkercatalog MotorsMasterDokument39 SeitenParkercatalog MotorsMasterAgus YulfizarNoch keine Bewertungen
- J An e Hall Screw Compressor Model 4200 o and M Manual PDFDokument86 SeitenJ An e Hall Screw Compressor Model 4200 o and M Manual PDFpraveen kumar vengadasamy100% (1)
- Bazen FormulaDokument4 SeitenBazen Formuladuje_raftmanNoch keine Bewertungen
- PIXMA Ip4200: Parts CatalogDokument6 SeitenPIXMA Ip4200: Parts Catalogpl3ym0b1l100% (1)
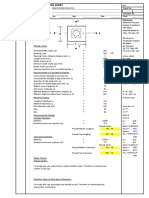
- Pilecap Sizing: Bukit Keteri (Pg3-Pc1)Dokument8 SeitenPilecap Sizing: Bukit Keteri (Pg3-Pc1)azwanNoch keine Bewertungen
- Double Class 1 LeverDokument4 SeitenDouble Class 1 Levernurlisa khaleedaNoch keine Bewertungen
- CBK Gear Pumps: 简体中文 - English Home About Equipment Culture Products News Download Feedback ContactDokument3 SeitenCBK Gear Pumps: 简体中文 - English Home About Equipment Culture Products News Download Feedback ContactCarlos Andrés CuelloNoch keine Bewertungen
- Binks Pressure Cup ManualDokument8 SeitenBinks Pressure Cup Manualsask100Noch keine Bewertungen
- Abutment (7m Hight)Dokument8 SeitenAbutment (7m Hight)Kamran AhmedNoch keine Bewertungen
- Column: in Construction Is HereDokument36 SeitenColumn: in Construction Is HereNikki ChauhanNoch keine Bewertungen
- LecturenotesDokument59 SeitenLecturenotesTyo Spider-MenkNoch keine Bewertungen
- 2017 - OTR Tyre Line-Up PDFDokument14 Seiten2017 - OTR Tyre Line-Up PDFOscar Correa MercadoNoch keine Bewertungen
- C2-Mallemala Studio Acmv PPT-23.12.2019Dokument10 SeitenC2-Mallemala Studio Acmv PPT-23.12.2019Raju KsnNoch keine Bewertungen
- A5 15-90 (R2006) PV PDFDokument5 SeitenA5 15-90 (R2006) PV PDFAnghelo AlcaldeNoch keine Bewertungen
- Parts List: Denim Pro Model BL 18Dokument19 SeitenParts List: Denim Pro Model BL 18David GarnerNoch keine Bewertungen
- Failure Analysis of An Overhead Travelin PDFDokument11 SeitenFailure Analysis of An Overhead Travelin PDFRadit and bambangNoch keine Bewertungen