Das könnte Ihnen auch gefallen
- PS 0 1011aDokument1 SeitePS 0 1011aGeorge QiNoch keine Bewertungen
- Start Developing iOS Apps TodayDokument133 SeitenStart Developing iOS Apps TodaydurimukNoch keine Bewertungen
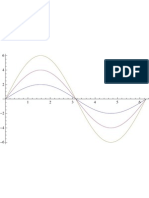
- Sin GraphDokument1 SeiteSin GraphGeorge QiNoch keine Bewertungen
- Hello, World!Dokument1 SeiteHello, World!George QiNoch keine Bewertungen
- Reflection of To Kill A MockingbirdDokument2 SeitenReflection of To Kill A MockingbirdGeorge QiNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Math 131-Spring 13-Course Outline PDFDokument3 SeitenMath 131-Spring 13-Course Outline PDFvejoshi21699Noch keine Bewertungen
- FitdistrplusDokument87 SeitenFitdistrplusPedro Humberto Almeida GonzagaNoch keine Bewertungen
- Covariance and Correlation: Multiple Random VariablesDokument2 SeitenCovariance and Correlation: Multiple Random VariablesAhmed AlzaidiNoch keine Bewertungen
- Homework 9: Assigned: Dec. 8, 2021Dokument2 SeitenHomework 9: Assigned: Dec. 8, 2021Tuğra DemirelNoch keine Bewertungen
- PSR Lecture Notes 2Dokument5 SeitenPSR Lecture Notes 2Majid Khan0% (1)
- Problem Book - Statics and DynamicsDokument117 SeitenProblem Book - Statics and DynamicsAnonymous BDYfZyiR0% (1)
- Dental Hygiene Portfolio GuideDokument12 SeitenDental Hygiene Portfolio GuideMostafa FayadNoch keine Bewertungen
- Types of Lines and AnglesDokument5 SeitenTypes of Lines and Anglesdeep72100% (1)
- Inequalities Questions MMEDokument7 SeitenInequalities Questions MMELoka Pavani Senthil GaneshNoch keine Bewertungen
- Special Distributions: Zlyang@smu - Edu.sgDokument40 SeitenSpecial Distributions: Zlyang@smu - Edu.sgcxNoch keine Bewertungen
- 1718 Level H Mathematics Exam Related Materials T2 Wk10Dokument11 Seiten1718 Level H Mathematics Exam Related Materials T2 Wk10elena123456elena123456Noch keine Bewertungen
- Aschi Keys Code 4ajyjyasdswsdsdkjdDokument10 SeitenAschi Keys Code 4ajyjyasdswsdsdkjdFazle ElahiNoch keine Bewertungen
- Nonlinear Programming Techniques For Operative Planning in Large Drinking Water NetworksDokument27 SeitenNonlinear Programming Techniques For Operative Planning in Large Drinking Water NetworksumairnedNoch keine Bewertungen
- Week 12 - Integral Leading To Exponential and Logarithmic FunctionsDokument7 SeitenWeek 12 - Integral Leading To Exponential and Logarithmic FunctionsTirzah GinagaNoch keine Bewertungen
- Math4 q3 Module6 Week6Dokument4 SeitenMath4 q3 Module6 Week6ALLYSSA MAE PELONIANoch keine Bewertungen
- Modelo Tracy Carter Tarek AmedDokument4 SeitenModelo Tracy Carter Tarek AmedJuan ChiroqueNoch keine Bewertungen
- Statistics ExamDokument1 SeiteStatistics ExamGom-o Eugenio Jr0% (1)
- 19SC602 Finite Element Analysis: Department of Civil Engineering, Amrita School of Engineering, CoimbatoreDokument20 Seiten19SC602 Finite Element Analysis: Department of Civil Engineering, Amrita School of Engineering, CoimbatoreKArthik AustinNoch keine Bewertungen
- 523 M1380: Adaptive Control Systems Lecture 5: Sufficiently Rich Signals and Parameter ConvergenceDokument6 Seiten523 M1380: Adaptive Control Systems Lecture 5: Sufficiently Rich Signals and Parameter ConvergenceCuter HsuNoch keine Bewertungen
- PDADokument52 SeitenPDAIbrahim AnsariNoch keine Bewertungen
- Cluster 4Dokument34 SeitenCluster 4Gary SNoch keine Bewertungen
- 2 Linear TransformationsDokument32 Seiten2 Linear TransformationsShanNoch keine Bewertungen
- Force MethodsDokument33 SeitenForce Methodsjackie_9227Noch keine Bewertungen
- A First Course in Discrete Mathematics - I. AndersonDokument200 SeitenA First Course in Discrete Mathematics - I. AndersonB . HassanNoch keine Bewertungen
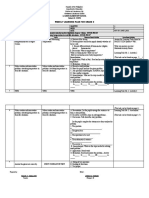
- Melcs Day Objectives Topic/s Classroom-Based Activities Home-Based Activities 1Dokument2 SeitenMelcs Day Objectives Topic/s Classroom-Based Activities Home-Based Activities 1Raquel CarteraNoch keine Bewertungen
- 06 1MA1 3H - Aiming For 9 Spring 2020 Mark Scheme (Set 1)Dokument14 Seiten06 1MA1 3H - Aiming For 9 Spring 2020 Mark Scheme (Set 1)AyishaNoch keine Bewertungen
- CH03 895267Dokument50 SeitenCH03 895267Pablo GomezNoch keine Bewertungen
- Logical EquivalenceDokument21 SeitenLogical EquivalenceTHe Study HallNoch keine Bewertungen
- PM2 Y3C Answers Practice Book CompiledDokument21 SeitenPM2 Y3C Answers Practice Book CompiledNgọc YếnNoch keine Bewertungen
- Introduction To Fuzzy SetDokument2 SeitenIntroduction To Fuzzy SetTria Putri NoviasariNoch keine Bewertungen