Das könnte Ihnen auch gefallen
- D-AAA-TRAFO-ATR-EXP-11 - 200 (Rev.0-2011)Dokument7 SeitenD-AAA-TRAFO-ATR-EXP-11 - 200 (Rev.0-2011)virasamirNoch keine Bewertungen
- Cum - Voltage Drop-BASEMENTDokument12 SeitenCum - Voltage Drop-BASEMENTprkshshrNoch keine Bewertungen
- Types of Power Factor CorrectionDokument52 SeitenTypes of Power Factor CorrectionAurobindo Mandal100% (1)
- VSD Pid ControlDokument8 SeitenVSD Pid ControlSupriyo SajaNoch keine Bewertungen
- Networking Working BOQ PDFDokument9 SeitenNetworking Working BOQ PDFMuneeb Ur rehmanNoch keine Bewertungen
- Rowan University Design Guide - PanelboardsDokument1 SeiteRowan University Design Guide - PanelboardszeliteNoch keine Bewertungen
- 26 32 13.13 Diesel Engine GeneratorDokument36 Seiten26 32 13.13 Diesel Engine GeneratorDavid Rowland Droyce100% (1)
- Single Phase Induction Motors PDFDokument20 SeitenSingle Phase Induction Motors PDFAmitava BiswasNoch keine Bewertungen
- DNV Earthing Rule Pag.36Dokument1 SeiteDNV Earthing Rule Pag.36CHOCAMAN1Noch keine Bewertungen
- DEWA UserManualDokument42 SeitenDEWA UserManualUnni Krishnan100% (1)
- Off Grid PV Systems System Install GuidelinesDokument11 SeitenOff Grid PV Systems System Install GuidelinesDarius BooyensNoch keine Bewertungen
- Caterpillar XQ1000 Containerized Diesel Generator SetDokument10 SeitenCaterpillar XQ1000 Containerized Diesel Generator SetMacAllister MachineryNoch keine Bewertungen
- International Telecommunication Union: RecommendationDokument25 SeitenInternational Telecommunication Union: Recommendationghosh_souvikNoch keine Bewertungen
- Automatic Power Supply Control: Eit-MDokument7 SeitenAutomatic Power Supply Control: Eit-MsamuelNoch keine Bewertungen
- Total Technical Specs PDFDokument259 SeitenTotal Technical Specs PDFBhavesh KeraliaNoch keine Bewertungen
- 15-90 kW Modular UPS Tender SpecsDokument11 Seiten15-90 kW Modular UPS Tender SpecsdhruvNoch keine Bewertungen
- QuestionsDokument9 SeitenQuestionsI Gede Darma Susila100% (1)
- The Panama Canal: Third Set of Locks ProjectDokument33 SeitenThe Panama Canal: Third Set of Locks Projectomar_cohen_1Noch keine Bewertungen
- ITU RecommendationsDokument25 SeitenITU Recommendationscoolbuddy_2k4Noch keine Bewertungen
- UKPN G81 Design Planning Appendix v1.0 KK 040711Dokument20 SeitenUKPN G81 Design Planning Appendix v1.0 KK 040711Sandeep LallNoch keine Bewertungen
- Liebert Gxt4 Ups 120208v 500va 3000va User Manual SL 23193Dokument66 SeitenLiebert Gxt4 Ups 120208v 500va 3000va User Manual SL 23193Alejandro Miranda HernándezNoch keine Bewertungen
- Ear Thing and Lightning Protection ProjectDokument26 SeitenEar Thing and Lightning Protection ProjectNishrachNoch keine Bewertungen
- EmiratesGBC Energy and Water Benchmarking For UAE Hotels 2016 ReportDokument27 SeitenEmiratesGBC Energy and Water Benchmarking For UAE Hotels 2016 ReportdharmaNoch keine Bewertungen
- General Method For Cable SizingDokument13 SeitenGeneral Method For Cable SizingMuhammad Mahmud100% (1)
- Absolyte Engineering PDFDokument110 SeitenAbsolyte Engineering PDFwizlishNoch keine Bewertungen
- PowerDokument66 SeitenPowerAkhil DotiNoch keine Bewertungen
- Electrical Thumb Rules (Part 1)Dokument3 SeitenElectrical Thumb Rules (Part 1)Manish Tiwari100% (1)
- Grundfos MG3Dokument16 SeitenGrundfos MG3Rameez IrfanNoch keine Bewertungen
- Substation - Inspection With Thermal ScanDokument9 SeitenSubstation - Inspection With Thermal ScanmatrengNoch keine Bewertungen
- Gino-Aka: Industrial AutomationDokument8 SeitenGino-Aka: Industrial Automationhsouna nasfiNoch keine Bewertungen
- ReadmeDokument190 SeitenReadmeJAIMES ALFONSO JINA MARIANoch keine Bewertungen
- SL3000 - 113-General SpecificationDokument37 SeitenSL3000 - 113-General SpecificationRadu IonutNoch keine Bewertungen
- AGC PM Designer's Handbook 4189341008 UK PDFDokument756 SeitenAGC PM Designer's Handbook 4189341008 UK PDFDiego100% (1)
- Reference DAPPER PDFDokument124 SeitenReference DAPPER PDFangel lozadaNoch keine Bewertungen
- Grid Interconnection of Embedded Generators Not For BiddingDokument31 SeitenGrid Interconnection of Embedded Generators Not For BiddingkrcdewanewNoch keine Bewertungen
- Value of Lost LoadDokument7 SeitenValue of Lost LoadLuis AntonioNoch keine Bewertungen
- Qcs 2010 Section 21 Part 4 Motor StartersDokument6 SeitenQcs 2010 Section 21 Part 4 Motor Startersbryanpastor106100% (1)
- REF615 Appl 756378 ENt PDFDokument404 SeitenREF615 Appl 756378 ENt PDFBishnu RegmiNoch keine Bewertungen
- ATC Aluminum ConduitsDokument4 SeitenATC Aluminum Conduitsomh129Noch keine Bewertungen
- Wire Basics of Ampacity or Copper Wire Current Carrying Capacity Carrying CapacitiesDokument3 SeitenWire Basics of Ampacity or Copper Wire Current Carrying Capacity Carrying CapacitiesarifardentNoch keine Bewertungen
- Batteyr Sizing For Emergency LightingDokument12 SeitenBatteyr Sizing For Emergency Lightingalexwongks6118Noch keine Bewertungen
- SPI CatalogueDokument16 SeitenSPI CatalogueBala MuruNoch keine Bewertungen
- Guide Specification PowerWave 33-1Dokument11 SeitenGuide Specification PowerWave 33-1ZIPDASHNoch keine Bewertungen
- Shahnawaz Report PrintDokument71 SeitenShahnawaz Report PrintFahad Amjad100% (1)
- SAER 10537 - ConXtech Overview Experience and Deployment PDFDokument52 SeitenSAER 10537 - ConXtech Overview Experience and Deployment PDFAyman AlradiNoch keine Bewertungen
- RRKL cable price listDokument3 SeitenRRKL cable price listKartik Wason100% (1)
- Specification For TransformersDokument25 SeitenSpecification For Transformerswaleed.liaquat.kkNoch keine Bewertungen
- Siemens Power Engineering Guide 7E 138Dokument1 SeiteSiemens Power Engineering Guide 7E 138mydearteacherNoch keine Bewertungen
- Specifications Sakya GeneratorDokument10 SeitenSpecifications Sakya Generator123agattarNoch keine Bewertungen
- Distribution Substation Design Code of PracticeDokument95 SeitenDistribution Substation Design Code of PracticeKei WongNoch keine Bewertungen
- Get 'Total Editing Time' To Work in Word 2010Dokument5 SeitenGet 'Total Editing Time' To Work in Word 2010HeroTwinNoch keine Bewertungen
- 1000-0041 enDokument2 Seiten1000-0041 enKazim RazaNoch keine Bewertungen
- Abu Dhabi SecutitySupplyStandardDokument17 SeitenAbu Dhabi SecutitySupplyStandardTrevor ClineNoch keine Bewertungen
- EDS 05-2010 Main Substation Feeder and Ring Main Unit Protection Settings (LPN) PDFDokument14 SeitenEDS 05-2010 Main Substation Feeder and Ring Main Unit Protection Settings (LPN) PDFLimuel EspirituNoch keine Bewertungen
- Knowledge is "Real Power": Introduction to Power QualityVon EverandKnowledge is "Real Power": Introduction to Power QualityNoch keine Bewertungen
- Practical Guide to International Standardization for Electrical Engineers: Impact on Smart Grid and e-Mobility MarketsVon EverandPractical Guide to International Standardization for Electrical Engineers: Impact on Smart Grid and e-Mobility MarketsNoch keine Bewertungen
- QCS 2010 Section 25 Part 2 Glass PDFDokument5 SeitenQCS 2010 Section 25 Part 2 Glass PDFbryanpastor1060% (1)
- Qcs 2010 Section 25 Part 3 WorkmanshipDokument4 SeitenQcs 2010 Section 25 Part 3 Workmanshipbryanpastor106Noch keine Bewertungen
- QCS 2010 Section 25 Part 4 Glazed Curtain WallDokument10 SeitenQCS 2010 Section 25 Part 4 Glazed Curtain Wallbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 13 Part 1 GeneralDokument4 SeitenQcs 2010 Section 13 Part 1 Generalbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 13 Part 4 Unit Masonry PDFDokument12 SeitenQcs 2010 Section 13 Part 4 Unit Masonry PDFbryanpastor106100% (1)
- Qcs 2010 Section 13 Part 5 Masonry Laying PDFDokument11 SeitenQcs 2010 Section 13 Part 5 Masonry Laying PDFbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 25 Part 1 General PDFDokument3 SeitenQcs 2010 Section 25 Part 1 General PDFbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 13 Part 3 Accessories PDFDokument3 SeitenQcs 2010 Section 13 Part 3 Accessories PDFbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 11 Part 2.3.08 She Procedures - The Report and InvesDokument39 SeitenQcs 2010 Section 11 Part 2.3.08 She Procedures - The Report and Invesbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 12 Part 1 General PDFDokument4 SeitenQcs 2010 Section 12 Part 1 General PDFbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 12 Part 3 Filling PDFDokument4 SeitenQcs 2010 Section 12 Part 3 Filling PDFbryanpastor106100% (1)
- QCS 2010 Section 11 Part 2.3.07 She Procedures - Contractors InitialDokument15 SeitenQCS 2010 Section 11 Part 2.3.07 She Procedures - Contractors Initialbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 12 Part 2 Excavation PDFDokument4 SeitenQcs 2010 Section 12 Part 2 Excavation PDFbryanpastor106100% (1)
- Qcs 2010 Section 13 Part 2 Mortar and GroutDokument6 SeitenQcs 2010 Section 13 Part 2 Mortar and Groutbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 11 Part 2.3.09 SHE Procedures - PERSONAL PROTECTIVE PDFDokument12 SeitenQcs 2010 Section 11 Part 2.3.09 SHE Procedures - PERSONAL PROTECTIVE PDFbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 11 Part 2.3.10 She Procedures - The Safe Use of CranDokument26 SeitenQcs 2010 Section 11 Part 2.3.10 She Procedures - The Safe Use of Cranbryanpastor106100% (7)
- Qcs 2010 Section 11 Part 2.1 Safety, Health and Environment (She) ManDokument30 SeitenQcs 2010 Section 11 Part 2.1 Safety, Health and Environment (She) Manbryanpastor10675% (8)
- Qcs 2010 Section 11 Part 1.6 Regulatory Documents - HUMAN FACTORS PDFDokument74 SeitenQcs 2010 Section 11 Part 1.6 Regulatory Documents - HUMAN FACTORS PDFbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 11 Part 2.3.12 She Procedures - Control of Working ADokument9 SeitenQcs 2010 Section 11 Part 2.3.12 She Procedures - Control of Working Abryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 11 Part 2.3.01 She Procedures - Risk IdentificationDokument31 SeitenQcs 2010 Section 11 Part 2.3.01 She Procedures - Risk Identificationbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 11 Part 1.3 Regulatory Document - WORKING at HEIGHTSDokument145 SeitenQcs 2010 Section 11 Part 1.3 Regulatory Document - WORKING at HEIGHTSbryanpastor106100% (5)
- Qcs 2010 Section 11 Part 2.3.14 SHE Procedures - ASBESTOSDokument17 SeitenQcs 2010 Section 11 Part 2.3.14 SHE Procedures - ASBESTOSbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 11 Part 2.3.15 She Procedures - Environmental ProtecDokument43 SeitenQcs 2010 Section 11 Part 2.3.15 She Procedures - Environmental Protecbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 11 Part 2.3.11 She Procedures - Permit To Work SysteDokument20 SeitenQcs 2010 Section 11 Part 2.3.11 She Procedures - Permit To Work Systebryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 11 Part 2.3.13 She Procedures - Fire Precautions DurDokument10 SeitenQcs 2010 Section 11 Part 2.3.13 She Procedures - Fire Precautions Durbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 11 Part 2.4 Risk Assessment GuidesDokument84 SeitenQcs 2010 Section 11 Part 2.4 Risk Assessment Guidesbryanpastor106100% (1)
- Qcs 2010 Section 11 Part 1.5 Regulatory Document - OTHER HAZARDOUS A PDFDokument124 SeitenQcs 2010 Section 11 Part 1.5 Regulatory Document - OTHER HAZARDOUS A PDFbryanpastor106100% (1)
- Qcs 2010 Section 11 Part 1.4 Regulatory Document - SAFE USE OF PLANT PDFDokument130 SeitenQcs 2010 Section 11 Part 1.4 Regulatory Document - SAFE USE OF PLANT PDFbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 11 Part 2.3.16 She Procedures - Learning Event ReporDokument9 SeitenQcs 2010 Section 11 Part 2.3.16 She Procedures - Learning Event Reporbryanpastor106Noch keine Bewertungen
- Qcs 2010 Section 11 Part 1.7 Regulatory Document - FIRE and FLAMMABLEDokument75 SeitenQcs 2010 Section 11 Part 1.7 Regulatory Document - FIRE and FLAMMABLEbryanpastor106100% (1)
- Hytherm 500, 600Dokument2 SeitenHytherm 500, 600Oliver OliverNoch keine Bewertungen
- Ahmad Ridzuan Ibrahim (CD 5103)Dokument24 SeitenAhmad Ridzuan Ibrahim (CD 5103)Kabil RajNoch keine Bewertungen
- Konica 7020 Error Codes: Code DescriptionDokument3 SeitenKonica 7020 Error Codes: Code Descriptionsaito36Noch keine Bewertungen
- IEEEtran HOWTO PDFDokument28 SeitenIEEEtran HOWTO PDFMario CruzNoch keine Bewertungen
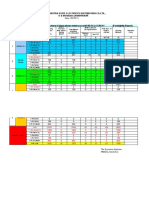
- Maharashtra State Electricity Distribution Co - LTD., O & M Division, NANDURBARDokument3 SeitenMaharashtra State Electricity Distribution Co - LTD., O & M Division, NANDURBARPuru BornareNoch keine Bewertungen
- Cl60 Rooftop Iom 0213 eDokument94 SeitenCl60 Rooftop Iom 0213 emikexiiNoch keine Bewertungen
- Spokane County Sheriff's Internal Communication PlanDokument11 SeitenSpokane County Sheriff's Internal Communication Planjmcgrath208100% (1)
- Bitsler DicebotDokument4 SeitenBitsler DicebotShinsNoch keine Bewertungen
- HPLaserJetProMFPM426fdn PDFDokument2 SeitenHPLaserJetProMFPM426fdn PDFOpština LebaneNoch keine Bewertungen
- 13.2EN Funds-Flow-Analysis Final V1-1 PDFDokument2 Seiten13.2EN Funds-Flow-Analysis Final V1-1 PDFvishnupriyaNoch keine Bewertungen
- BS 5950-4-1994 (Englezesc) PDFDokument38 SeitenBS 5950-4-1994 (Englezesc) PDFYannis Alexandru100% (4)
- Chapter 19 - Managing Personal CommunicationDokument37 SeitenChapter 19 - Managing Personal CommunicationAmit Thapa100% (2)
- Hydraulic Excavator GuideDokument9 SeitenHydraulic Excavator Guidewritetojs100% (1)
- Exam 1 With SolutionsDokument11 SeitenExam 1 With SolutionsSsebass PozzoNoch keine Bewertungen
- Environmental Management Plan - MatrixDokument6 SeitenEnvironmental Management Plan - Matrixplokhande47100% (1)
- ASME B31.3 2020 CambiosDokument10 SeitenASME B31.3 2020 CambiosJosé Juan Jiménez AlejandroNoch keine Bewertungen
- Generador de Vapor Cu360Dokument36 SeitenGenerador de Vapor Cu360Jonatan medran ochoaNoch keine Bewertungen
- Arinc Industry Activities Cabin Systems Overview: Version 2018-01Dokument42 SeitenArinc Industry Activities Cabin Systems Overview: Version 2018-01je_carD23Noch keine Bewertungen
- PLSQL 4 2 Practice RodrigoDokument6 SeitenPLSQL 4 2 Practice RodrigoRodrigoRojasHuerta100% (1)
- Electric Current and Ohm's Law - LecturesDokument21 SeitenElectric Current and Ohm's Law - LecturesMuhammad AhmadNoch keine Bewertungen
- 6.2.1.11 Dyan Indrayanto - Anatomy of MalwareDokument3 Seiten6.2.1.11 Dyan Indrayanto - Anatomy of MalwareDyan IndrayantoNoch keine Bewertungen
- AeDokument12 SeitenAeRoberto SanchezNoch keine Bewertungen
- GRT8100 Product Guide Imperial PDFDokument32 SeitenGRT8100 Product Guide Imperial PDFSijumon sijuNoch keine Bewertungen
- BIT3251 BIT3251 BIT3251 BIT3251 應用指南 應用指南 應用指南 應用指南: Beyond Innovation TechnologyDokument10 SeitenBIT3251 BIT3251 BIT3251 BIT3251 應用指南 應用指南 應用指南 應用指南: Beyond Innovation TechnologyHamza AbbasiNoch keine Bewertungen
- Checklist For BrickworkDokument2 SeitenChecklist For Brickworkइंजि कौस्तुभ पवारNoch keine Bewertungen
- A Detailed Report ON Incense Stick ProductionDokument6 SeitenA Detailed Report ON Incense Stick Productionanand agarwalNoch keine Bewertungen
- Finaldc 2Dokument10 SeitenFinaldc 2Noel BactonNoch keine Bewertungen
- GT Kompetitor parts list comparisonDokument4 SeitenGT Kompetitor parts list comparisonrachmad syahputraNoch keine Bewertungen
- Tensile TestDokument15 SeitenTensile Testdwimukh360Noch keine Bewertungen
- The Electromagnetic Spectrum: Multiple ChoiceDokument10 SeitenThe Electromagnetic Spectrum: Multiple ChoiceVannie MonderoNoch keine Bewertungen