Das könnte Ihnen auch gefallen
- High-Power Electronics: Volume 2Von EverandHigh-Power Electronics: Volume 2P. L. KapitzaNoch keine Bewertungen
- Ham Cram: Amateur Radio Technician License Review CourseDokument120 SeitenHam Cram: Amateur Radio Technician License Review CourseNew UserNoch keine Bewertungen
- Wave Shaping and Swiching CircuitsDokument3 SeitenWave Shaping and Swiching Circuitskaran007_mNoch keine Bewertungen
- Beitman 1970 Television TV 1970Dokument196 SeitenBeitman 1970 Television TV 1970Dirceu RodriguesNoch keine Bewertungen
- Digital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsVon EverandDigital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsNoch keine Bewertungen
- CRT Rejuvenator MonochromeDokument1 SeiteCRT Rejuvenator MonochromeXxvic2rxXNoch keine Bewertungen
- Ic-7400 SM 3Dokument84 SeitenIc-7400 SM 3Luciano HoraNoch keine Bewertungen
- Theory of Microwave Valves: International Series of Monographs on Electronics and InstrumentationVon EverandTheory of Microwave Valves: International Series of Monographs on Electronics and InstrumentationNoch keine Bewertungen
- GLM240128Dokument35 SeitenGLM240128api-3700809Noch keine Bewertungen
- British Special Quality Valves and Electron Tube Devices Data Annual 1964–65Von EverandBritish Special Quality Valves and Electron Tube Devices Data Annual 1964–65Noch keine Bewertungen
- Idoc - Pub - LCD Monitor Repair PDFDokument26 SeitenIdoc - Pub - LCD Monitor Repair PDFElektroNiNoch keine Bewertungen
- Walkman Wonder MW LoopDokument3 SeitenWalkman Wonder MW Loopmax_orwellNoch keine Bewertungen
- All American FiveDokument12 SeitenAll American Fivejaapie666Noch keine Bewertungen
- Sanyo Integrated Circuits For TV-VCR UseDokument34 SeitenSanyo Integrated Circuits For TV-VCR UseИгорь КремковNoch keine Bewertungen
- Diagramas de Radios - Beitman-1949Dokument162 SeitenDiagramas de Radios - Beitman-1949rene DavidNoch keine Bewertungen
- The Transistor Amplifier: TopicsDokument65 SeitenThe Transistor Amplifier: TopicsShaksham Inc.Noch keine Bewertungen
- Practical Mosfet Testing For Audio: by Nelson Pass, (C) 2003 Pass LaboratoriesDokument11 SeitenPractical Mosfet Testing For Audio: by Nelson Pass, (C) 2003 Pass Laboratoriesanon-306355100% (1)
- Drake PartlistDokument50 SeitenDrake PartlistAnonymous hPUlIF6Noch keine Bewertungen
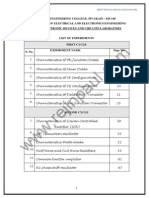
- EE2207 Lab ManualDokument72 SeitenEE2207 Lab ManualgowthamveluNoch keine Bewertungen
- WatimetroDokument11 SeitenWatimetroLuis Enrique Castillejo GonzalesNoch keine Bewertungen
- IC Logic Families and CharacteristicsDokument10 SeitenIC Logic Families and CharacteristicsAnonymous eWMnRr70qNoch keine Bewertungen
- Antena Bomer 4 ElemenDokument2 SeitenAntena Bomer 4 ElemenAudi MirantiNoch keine Bewertungen
- 2014 Handbook Supplemental FilesDokument13 Seiten2014 Handbook Supplemental FilesIñaki PerezNoch keine Bewertungen
- TX RX Sequencerv2Dokument9 SeitenTX RX Sequencerv2Zulu Bravo MikeNoch keine Bewertungen
- By Vvill Coauthor of I'elements of Radio"Dokument26 SeitenBy Vvill Coauthor of I'elements of Radio"Roger KolakowskiNoch keine Bewertungen
- Wireless World 1982 10Dokument132 SeitenWireless World 1982 10jacomartNoch keine Bewertungen
- Flat Panel AntennaDokument3 SeitenFlat Panel AntennaStephen Dunifer100% (1)
- Reflex MW AM ReceiverDokument3 SeitenReflex MW AM ReceiverCarlos Molins LopezNoch keine Bewertungen
- Circuits I Have KnownDokument189 SeitenCircuits I Have Knownjack266Noch keine Bewertungen
- Electronic - Schematic Circuits For The HobbyistDokument159 SeitenElectronic - Schematic Circuits For The HobbyistDaniel ComeglioNoch keine Bewertungen
- Understanding QuadratureDokument6 SeitenUnderstanding Quadraturekunduru_reddy_3Noch keine Bewertungen
- FM Transmitter PDFDokument6 SeitenFM Transmitter PDFGoncalo EscusaNoch keine Bewertungen
- Data Sheet FLC 100Dokument2 SeitenData Sheet FLC 100Ömer Vehbe100% (1)
- Toyocom Cristal OscillatorsDokument58 SeitenToyocom Cristal Oscillatorsb33g33100% (1)
- DatasheetDokument1 SeiteDatasheetjakob278313Noch keine Bewertungen
- Tektronix 2710 Spectrum Analyzer SM PDFDokument402 SeitenTektronix 2710 Spectrum Analyzer SM PDFJpaul RodriguezNoch keine Bewertungen
- TransistorCookbook PDFDokument6 SeitenTransistorCookbook PDFMario TodorovNoch keine Bewertungen
- Siglent SDS1000CML Oscilloscope Service ManualDokument61 SeitenSiglent SDS1000CML Oscilloscope Service Manualandorrr4937Noch keine Bewertungen
- Antenna Analyzer vk5jst Version 1 Instructions PDFDokument10 SeitenAntenna Analyzer vk5jst Version 1 Instructions PDFPisu Miau Pisu MiauNoch keine Bewertungen
- Yaesu FT-203R Instruction ManualDokument28 SeitenYaesu FT-203R Instruction ManualYayok S. AnggoroNoch keine Bewertungen
- LCD TV General Troubleshooting and Tips To RCA L32WD22 FixDokument6 SeitenLCD TV General Troubleshooting and Tips To RCA L32WD22 Fixdfenncatman20% (1)
- Building and Operating The Digital Sony SRF-39Dokument4 SeitenBuilding and Operating The Digital Sony SRF-39englagra0% (1)
- Toshiba 24AF46 TVDokument44 SeitenToshiba 24AF46 TVWilfredo ManzanoNoch keine Bewertungen
- Rigol M300 DAQ Service GuideDokument64 SeitenRigol M300 DAQ Service GuideMichael Doyle100% (1)
- Charge Pump 4Dokument15 SeitenCharge Pump 4r96221029Noch keine Bewertungen
- Amplificadores Radio Otros DL413 REV1Dokument473 SeitenAmplificadores Radio Otros DL413 REV1gromzapNoch keine Bewertungen
- Hi Fi Aiwa Cs Naj54u CX nbl54lh PDFDokument28 SeitenHi Fi Aiwa Cs Naj54u CX nbl54lh PDFpitomoyaNoch keine Bewertungen
- Signal Generator ManualDokument6 SeitenSignal Generator ManualDave ShshNoch keine Bewertungen
- Surplus Radio Conversion Manual Vol2Dokument127 SeitenSurplus Radio Conversion Manual Vol2ygiannarakis100% (1)
- Testing Electronic ComponentsDokument10 SeitenTesting Electronic ComponentsArdit MxxNoch keine Bewertungen
- 7136 Oscilloscope Basics GuideDokument26 Seiten7136 Oscilloscope Basics GuideHectorNoch keine Bewertungen
- Sencore Tech Tip #129 Learning To Test CRTs With The CR70s Universal AdapterDokument3 SeitenSencore Tech Tip #129 Learning To Test CRTs With The CR70s Universal AdaptertwolluverNoch keine Bewertungen
- Sb220 Compendium Va7jw Rev2Dokument40 SeitenSb220 Compendium Va7jw Rev2FrankNoch keine Bewertungen
- Lecture Notes For Analog ElectronicsDokument54 SeitenLecture Notes For Analog Electronicsmom028Noch keine Bewertungen
- FAF6 AC80 D 01Dokument20 SeitenFAF6 AC80 D 01adnantahir012873Noch keine Bewertungen
- Catalog of HuntronDokument0 SeitenCatalog of Huntronnj23dublin100% (1)
- Sony Chassis Ba-4 (C-TV KV-13M40 - 50 - 51, KV-14MB40, KV-20M40, KV-20S40 - 41, KV-20V80, Kv-21se80, Kv-21se40, Kv-21me40... Service Manual)Dokument94 SeitenSony Chassis Ba-4 (C-TV KV-13M40 - 50 - 51, KV-14MB40, KV-20M40, KV-20S40 - 41, KV-20V80, Kv-21se80, Kv-21se40, Kv-21me40... Service Manual)Mauro Mendez100% (1)
- Capacitive Coupling of Gate Signals PDFDokument7 SeitenCapacitive Coupling of Gate Signals PDFVincent KorieNoch keine Bewertungen
- Energy MeterDokument43 SeitenEnergy MeterVincent KorieNoch keine Bewertungen
- Using Standard Control Ics To Generate Negative Gate Bias For Mosfets and IgbtsDokument4 SeitenUsing Standard Control Ics To Generate Negative Gate Bias For Mosfets and IgbtsVincent KorieNoch keine Bewertungen
- Programmable Battery ChargerDokument30 SeitenProgrammable Battery ChargerVincent Korie100% (1)
- Electronic Safe2Dokument50 SeitenElectronic Safe2Vincent KorieNoch keine Bewertungen
- Waste Bin DisposalDokument43 SeitenWaste Bin DisposalVincent KorieNoch keine Bewertungen
- Digital ThermometerDokument34 SeitenDigital ThermometerVincent Korie100% (1)
- My Data Logger BodyDokument45 SeitenMy Data Logger BodyVincent KorieNoch keine Bewertungen
- Copmuter Controlled Traffic LightDokument39 SeitenCopmuter Controlled Traffic LightVincent KorieNoch keine Bewertungen
- 2-Way Wired IntercomDokument56 Seiten2-Way Wired IntercomVincent Korie100% (4)
- 2-Way Wired IntercomDokument56 Seiten2-Way Wired IntercomVincent Korie100% (4)
- Waste Bin DisposalDokument43 SeitenWaste Bin DisposalVincent KorieNoch keine Bewertungen
- Ac Frequency CounterDokument30 SeitenAc Frequency CounterVincent KorieNoch keine Bewertungen
- Anti TheftDokument27 SeitenAnti TheftVincent KorieNoch keine Bewertungen
- Auto Car Lock Using GSMDokument15 SeitenAuto Car Lock Using GSMVincent KorieNoch keine Bewertungen
- Construction of 0-3000 Watts Digital WattmeterDokument30 SeitenConstruction of 0-3000 Watts Digital WattmeterVincent KorieNoch keine Bewertungen
- Computer Controlled Gate With CameraDokument25 SeitenComputer Controlled Gate With CameraVincent KorieNoch keine Bewertungen
- DC Servo Motor Position SystemDokument28 SeitenDC Servo Motor Position SystemVincent Korie100% (2)
- Digital VoltmeterDokument17 SeitenDigital VoltmeterVincent KorieNoch keine Bewertungen
- Chapter Three Research and Design MethodologyDokument25 SeitenChapter Three Research and Design MethodologyVincent KorieNoch keine Bewertungen
- Construction of 0-3000 Watts Digital WattmeterDokument30 SeitenConstruction of 0-3000 Watts Digital WattmeterVincent KorieNoch keine Bewertungen
- Biometric Exam RegDokument41 SeitenBiometric Exam RegVincent KorieNoch keine Bewertungen
- Inverter Systems 2010Dokument74 SeitenInverter Systems 2010Vincent Korie100% (1)
- Electronic ComponentsDokument65 SeitenElectronic ComponentsVincent KorieNoch keine Bewertungen
- Digital Wall Clock Powerpoint2Dokument6 SeitenDigital Wall Clock Powerpoint2Vincent KorieNoch keine Bewertungen
- Digital MultimeterDokument53 SeitenDigital MultimeterVincent KorieNoch keine Bewertungen
- Automated Power Dist BoardDokument22 SeitenAutomated Power Dist BoardVincent KorieNoch keine Bewertungen
- 6 Digit Lock CodeDokument31 Seiten6 Digit Lock CodeVincent KorieNoch keine Bewertungen
- DC Motor Speed Control Using PWMDokument14 SeitenDC Motor Speed Control Using PWMVincent KorieNoch keine Bewertungen
- Infopack 2016 enDokument44 SeitenInfopack 2016 enAlbertoNoch keine Bewertungen
- Chip Scale Atomic Magnetometer Based On SERFDokument4 SeitenChip Scale Atomic Magnetometer Based On SERFluckystar83100% (2)
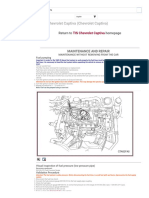
- Chevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.Dokument57 SeitenChevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.krisdiarto@gmail.com96% (23)
- Chapter5 Memory ManagementDokument78 SeitenChapter5 Memory ManagementJackYuan JinFengNoch keine Bewertungen
- 03 Transformers CT VTDokument10 Seiten03 Transformers CT VTEnrique G.Noch keine Bewertungen
- (4.5.0 ZULU Beta) (DUMP ALL) BTFL - Cli - 20230916 - 172153Dokument27 Seiten(4.5.0 ZULU Beta) (DUMP ALL) BTFL - Cli - 20230916 - 172153Dan MultiNoch keine Bewertungen
- Battery CatalogueDokument6 SeitenBattery CataloguerantaroNoch keine Bewertungen
- ORT ReportDokument71 SeitenORT ReportNaveen ChodagiriNoch keine Bewertungen
- TCRT5000 PDFDokument9 SeitenTCRT5000 PDFmazhar940Noch keine Bewertungen
- VSSUT (EEE) SyllabusDokument47 SeitenVSSUT (EEE) SyllabusAshutosh GuptaNoch keine Bewertungen
- Brain Controlled Car For Disabled Using Artificial IntelligenceDokument17 SeitenBrain Controlled Car For Disabled Using Artificial IntelligenceMdkhanzNoch keine Bewertungen
- Vector VII 104-561kVA User Manual 6.6.1Dokument165 SeitenVector VII 104-561kVA User Manual 6.6.1juliocanel2009100% (3)
- ABM Chain HoistDokument14 SeitenABM Chain HoistZuwairi NawawiNoch keine Bewertungen
- AC ResumeDokument2 SeitenAC Resumesampaguita_r7166Noch keine Bewertungen
- Catalog C60H-DCDokument6 SeitenCatalog C60H-DCNae MocioiNoch keine Bewertungen
- Patrol Box PlansDokument6 SeitenPatrol Box PlansPePe ProjectsNoch keine Bewertungen
- Scope: Ferritic Heat-Resistant Steel TK 1.4762Dokument5 SeitenScope: Ferritic Heat-Resistant Steel TK 1.4762Siis IngenieriaNoch keine Bewertungen
- A Study of Chemical Structure of Soft and Hardwood andDokument7 SeitenA Study of Chemical Structure of Soft and Hardwood andBruna BarraNoch keine Bewertungen
- Pre Check: 1. Vgrs System DescriptionDokument8 SeitenPre Check: 1. Vgrs System DescriptionNickNoch keine Bewertungen
- PSD Installation Manual Moore IndustriesDokument16 SeitenPSD Installation Manual Moore IndustriesnohjadNoch keine Bewertungen
- Module 3 Density Altitude ExperimentDokument3 SeitenModule 3 Density Altitude ExperimentIvan100% (1)
- NC100HDokument2 SeitenNC100HDouglas GilbNoch keine Bewertungen
- Maxstar140str (KK013519)Dokument52 SeitenMaxstar140str (KK013519)mrtans0% (1)
- Chapter 1 Introduction To Green BuildingsDokument19 SeitenChapter 1 Introduction To Green BuildingsSunil BeheraNoch keine Bewertungen
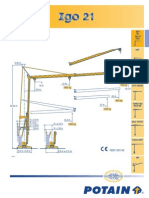
- Potain Igo 21 PDFDokument4 SeitenPotain Igo 21 PDFMarco CruzNoch keine Bewertungen
- Eee25 2018syllabusDokument4 SeitenEee25 2018syllabusEmman Joshua BustoNoch keine Bewertungen
- EVI DC Inverter Technical Manual 2 Capacity TableDokument67 SeitenEVI DC Inverter Technical Manual 2 Capacity TableMouyed Al QasemNoch keine Bewertungen
- Safety Inventory ExercisesDokument12 SeitenSafety Inventory ExercisesParnabho KunduNoch keine Bewertungen
- Hydraulic Home ElevatorDokument38 SeitenHydraulic Home ElevatorPatrisha SantosNoch keine Bewertungen
- Magnetic Separation PDFDokument12 SeitenMagnetic Separation PDFmitzoskyNoch keine Bewertungen
- Chip War: The Quest to Dominate the World's Most Critical TechnologyVon EverandChip War: The Quest to Dominate the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (227)
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsVon EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsNoch keine Bewertungen
- Chip War: The Fight for the World's Most Critical TechnologyVon EverandChip War: The Fight for the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (82)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsVon EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsBewertung: 5 von 5 Sternen5/5 (2)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Von EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Bewertung: 5 von 5 Sternen5/5 (2)
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Von EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Bewertung: 5 von 5 Sternen5/5 (1)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Von EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Bewertung: 5 von 5 Sternen5/5 (2)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XVon EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XBewertung: 3 von 5 Sternen3/5 (2)
- How to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideVon EverandHow to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideBewertung: 1 von 5 Sternen1/5 (1)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Von EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Bewertung: 5 von 5 Sternen5/5 (1)
- Computer Science: A Concise IntroductionVon EverandComputer Science: A Concise IntroductionBewertung: 4.5 von 5 Sternen4.5/5 (14)
- Amazon Web Services (AWS) Interview Questions and AnswersVon EverandAmazon Web Services (AWS) Interview Questions and AnswersBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Programming with STM32: Getting Started with the Nucleo Board and C/C++Von EverandProgramming with STM32: Getting Started with the Nucleo Board and C/C++Bewertung: 3.5 von 5 Sternen3.5/5 (3)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxVon EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNoch keine Bewertungen
- iWoz: How I Invented the Personal Computer and Had Fun Along the WayVon EverandiWoz: How I Invented the Personal Computer and Had Fun Along the WayBewertung: 3.5 von 5 Sternen3.5/5 (317)
- Raspberry Pi for Python Programmers Cookbook - Second EditionVon EverandRaspberry Pi for Python Programmers Cookbook - Second EditionNoch keine Bewertungen
- Mastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFVon EverandMastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFNoch keine Bewertungen
- Windows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertVon EverandWindows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertBewertung: 3.5 von 5 Sternen3.5/5 (6)
- Amazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesVon EverandAmazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesNoch keine Bewertungen