Das könnte Ihnen auch gefallen
- Control Systems Formula SheetDokument12 SeitenControl Systems Formula SheetliamhrNoch keine Bewertungen
- White Paper: Intro Ducti On To RF Fundamentals of A N RF DesignDokument46 SeitenWhite Paper: Intro Ducti On To RF Fundamentals of A N RF DesignYousuf ShaikhNoch keine Bewertungen
- Bode Lesson1Dokument32 SeitenBode Lesson1Fairus AffiniNoch keine Bewertungen
- Block Diagrams Control SystemsDokument25 SeitenBlock Diagrams Control SystemsSingappuliNoch keine Bewertungen
- Bode Plot - EC 502Dokument37 SeitenBode Plot - EC 502ajay meena100% (2)
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesVon EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesBewertung: 1.5 von 5 Sternen1.5/5 (2)
- Spectrum Report ColeagoDokument49 SeitenSpectrum Report Coleagowalia_anujNoch keine Bewertungen
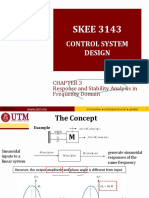
- Response and Stability Analysis in Frequency DomainDokument54 SeitenResponse and Stability Analysis in Frequency DomainMYNAMENoch keine Bewertungen
- NavtechGPS Course CatalogDokument19 SeitenNavtechGPS Course CatalogNavtechGPSNoch keine Bewertungen
- Root Locus 2 N. MagajiDokument12 SeitenRoot Locus 2 N. MagajiNuraddeen MagajiNoch keine Bewertungen
- Lect 9 Overall Transfer Function of A Closed-Loop Control SystemDokument8 SeitenLect 9 Overall Transfer Function of A Closed-Loop Control SystemZaidoon MohsinNoch keine Bewertungen
- Quiz in Data Communications and Networking ECE Board ExamDokument4 SeitenQuiz in Data Communications and Networking ECE Board ExamMAPUA EDUCATIONAL FILESNoch keine Bewertungen
- Bode PlotDokument30 SeitenBode PlotSatya SuryaNoch keine Bewertungen
- 5G Antennas Comscope Webinar PDFDokument25 Seiten5G Antennas Comscope Webinar PDFuttuttimail100% (1)
- GSM Indoor Coverage SolutionDokument11 SeitenGSM Indoor Coverage SolutiongintuksNoch keine Bewertungen
- TNEB FUSE OF CALL Contact CoimbatoreDokument10 SeitenTNEB FUSE OF CALL Contact CoimbatoreiddrxNoch keine Bewertungen
- Notes Tee602 Polar PlotDokument33 SeitenNotes Tee602 Polar PlottansnvarmaNoch keine Bewertungen
- Notes Tee602 Bode PlotDokument23 SeitenNotes Tee602 Bode PlottansnvarmaNoch keine Bewertungen
- Mi L T Ici It Microelectronic Circuits: AmplifierDokument19 SeitenMi L T Ici It Microelectronic Circuits: AmplifierVishal JohriNoch keine Bewertungen
- Yeek08 2014 IIIB5Dokument41 SeitenYeek08 2014 IIIB5LeungSiuYapNoch keine Bewertungen
- 5.0 Frequency ResponseDokument80 Seiten5.0 Frequency ResponseIka PriyantiNoch keine Bewertungen
- Prestige Institute of Engineering & Science Indore (M.P.)Dokument3 SeitenPrestige Institute of Engineering & Science Indore (M.P.)SagarManjrekarNoch keine Bewertungen
- Tutorial 11Dokument25 SeitenTutorial 11Yang ElvisQUNoch keine Bewertungen
- 08 Frequency Response Methods MechDokument21 Seiten08 Frequency Response Methods MechMamodiNoch keine Bewertungen
- LCS Lab 11Dokument9 SeitenLCS Lab 11SaRosh RaeesNoch keine Bewertungen
- Lecture 14Dokument35 SeitenLecture 14AhsabNoch keine Bewertungen
- Notes Tee602 Bode Plot PDFDokument23 SeitenNotes Tee602 Bode Plot PDFtansnvarmaNoch keine Bewertungen
- Freq ResponseDokument23 SeitenFreq Responselili aboudNoch keine Bewertungen
- Exercise 3 LinearDokument5 SeitenExercise 3 LinearWajih AbboudNoch keine Bewertungen
- Control System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorDokument76 SeitenControl System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorSudhanshu Singh0% (1)
- Chapter 31ADokument43 SeitenChapter 31AHafidz HmaNoch keine Bewertungen
- Regulation and Control: by Tewedage SileshiDokument12 SeitenRegulation and Control: by Tewedage SileshihermelaNoch keine Bewertungen
- Solution Assignment 3Dokument7 SeitenSolution Assignment 3sushant sharmaNoch keine Bewertungen
- Lect 9-Frequency-Response-techniques 1Dokument68 SeitenLect 9-Frequency-Response-techniques 1Tarik ZiadNoch keine Bewertungen
- Frequency ResponseDokument9 SeitenFrequency ResponseAnanda RamanNoch keine Bewertungen
- Exercises 05 Block Diagram ReductionDokument3 SeitenExercises 05 Block Diagram ReductionKabo MphanyaneNoch keine Bewertungen
- Lesson 11Dokument24 SeitenLesson 11KhuleedShaikhNoch keine Bewertungen
- Lesson Plan: S.N Date Planne D Topics Date Engage D Remark SDokument28 SeitenLesson Plan: S.N Date Planne D Topics Date Engage D Remark SVARUN B MNoch keine Bewertungen
- Module 2 - 2Dokument68 SeitenModule 2 - 2abcdNoch keine Bewertungen
- Block Diagram Dan Signal Flow GraphDokument6 SeitenBlock Diagram Dan Signal Flow GraphAira WongNoch keine Bewertungen
- Frequency ResponseDokument62 SeitenFrequency ResponseSujin PrajapatiNoch keine Bewertungen
- Tutorial On Unit 2Dokument3 SeitenTutorial On Unit 2Vishal DeshpandeNoch keine Bewertungen
- Convolutional Codes: N, K, M K-N MDokument18 SeitenConvolutional Codes: N, K, M K-N MKishore KrishnanNoch keine Bewertungen
- Notes Tee602 Polar PlotDokument33 SeitenNotes Tee602 Polar PlotAnonymous kj9KW15CQnNoch keine Bewertungen
- Ass4 PDFDokument7 SeitenAss4 PDFbinu10eeeNoch keine Bewertungen
- Goldberg PolyhedronDokument5 SeitenGoldberg Polyhedronnoris del pilarNoch keine Bewertungen
- Mw05 Python 강의Dokument11 SeitenMw05 Python 강의ELECTRO MECHNoch keine Bewertungen
- CB1 SI CorRGRGrectionDokument9 SeitenCB1 SI CorRGRGrectionLouis BruyelleNoch keine Bewertungen
- Homework Chapter 03-2Dokument3 SeitenHomework Chapter 03-2Miguel RobalinoNoch keine Bewertungen
- Polar Plot and Its Analysis - GATE Study Material in PDFDokument6 SeitenPolar Plot and Its Analysis - GATE Study Material in PDFnidhi tripathiNoch keine Bewertungen
- JB W4 DPP10Dokument5 SeitenJB W4 DPP10AAVANINoch keine Bewertungen
- Controls Systems ExamplesDokument67 SeitenControls Systems ExamplesUpender Rao SunkishalaNoch keine Bewertungen
- Module 6Dokument34 SeitenModule 6Debasis ChandraNoch keine Bewertungen
- Bilangan KompleksDokument35 SeitenBilangan KompleksFandi WaldaniNoch keine Bewertungen
- Root Locus Analysis TutorialsDokument1 SeiteRoot Locus Analysis TutorialsTeophelus HamutenyaNoch keine Bewertungen
- Bode Plots: Multiple Choice Questions For Online ExamDokument23 SeitenBode Plots: Multiple Choice Questions For Online ExamRajeev Singh BishtNoch keine Bewertungen
- Cf01 Tut SolDokument5 SeitenCf01 Tut SolLao MjieNoch keine Bewertungen
- Control Systems Theory: Sinusoidal Tools STB 35103Dokument42 SeitenControl Systems Theory: Sinusoidal Tools STB 35103Akula VeerrajuNoch keine Bewertungen
- Polos Cuadraticos ResonanciaDokument6 SeitenPolos Cuadraticos ResonanciajaronjerNoch keine Bewertungen
- Winter Ap Quiz One AnswersDokument3 SeitenWinter Ap Quiz One AnswersteachopensourceNoch keine Bewertungen
- Mid SampleDokument8 SeitenMid SampleZahin Tazwar 1921486642Noch keine Bewertungen
- Schematic Representation of DC-DC Buck Converter: % D 0.5 e 12/D 2 J 12 G MDokument11 SeitenSchematic Representation of DC-DC Buck Converter: % D 0.5 e 12/D 2 J 12 G Mswati priyaNoch keine Bewertungen
- ME311 Autumn2021 T5Dokument5 SeitenME311 Autumn2021 T5Varun PathakNoch keine Bewertungen
- Nyquist Stability ProofDokument4 SeitenNyquist Stability Proofsaggu1991Noch keine Bewertungen
- Online Control Lecture - 8.pdfDokument13 SeitenOnline Control Lecture - 8.pdfAmylia NatashaNoch keine Bewertungen
- Tables of Coulomb Wave Functions: Whittaker FunctionsVon EverandTables of Coulomb Wave Functions: Whittaker FunctionsNoch keine Bewertungen
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Von EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Noch keine Bewertungen
- MAEG3920 - Chapter 3Dokument38 SeitenMAEG3920 - Chapter 3LeungSiuYapNoch keine Bewertungen
- Yeek01 2014 I.A-I.EDokument77 SeitenYeek01 2014 I.A-I.ELeungSiuYapNoch keine Bewertungen
- MAEG3050Dokument5 SeitenMAEG3050LeungSiuYapNoch keine Bewertungen
- Yeek04 2014 Iic IidDokument23 SeitenYeek04 2014 Iic IidLeungSiuYapNoch keine Bewertungen
- Ii. Feedback Control SystemsDokument32 SeitenIi. Feedback Control SystemsLeungSiuYapNoch keine Bewertungen
- ADU451720Dokument2 SeitenADU451720Raluca Roxana SzaszNoch keine Bewertungen
- Lab Manual 1Dokument12 SeitenLab Manual 1KOJANoch keine Bewertungen
- Wimax Technology: Worldwide Interoperability For Microwave AccessDokument28 SeitenWimax Technology: Worldwide Interoperability For Microwave AccessAyeshkhanNoch keine Bewertungen
- Beam Forming@001Dokument3 SeitenBeam Forming@001Srikumar T BNoch keine Bewertungen
- Traffic Grooming in Optical NetworksDokument2 SeitenTraffic Grooming in Optical NetworksashfaqiNoch keine Bewertungen
- AD9852Dokument42 SeitenAD9852cbernal73Noch keine Bewertungen
- Rohde Schwarz EVS300 DatasheetDokument16 SeitenRohde Schwarz EVS300 Datasheetliu5031Noch keine Bewertungen
- ZTE Ultra-High-Precision Time Synchronization Network Provides Technical Support For 5G CommercializationDokument5 SeitenZTE Ultra-High-Precision Time Synchronization Network Provides Technical Support For 5G CommercializationJose ValenzuelaNoch keine Bewertungen
- GPRS White PaperDokument18 SeitenGPRS White Paperanon-728131100% (1)
- Question BankDokument3 SeitenQuestion BankREjosh BonifacioNoch keine Bewertungen
- Error Detection Unit 3Dokument13 SeitenError Detection Unit 3Aryaman TiwariNoch keine Bewertungen
- Gprs Umts AuthDokument6 SeitenGprs Umts AuthmiloabhiNoch keine Bewertungen
- 5g Mobile TechnologyDokument6 Seiten5g Mobile TechnologyVikas KapoorNoch keine Bewertungen
- Airband Radio Operator Certificate ManualDokument14 SeitenAirband Radio Operator Certificate ManualhantupegadaianNoch keine Bewertungen
- Marking Scheme Computer NetworksDokument3 SeitenMarking Scheme Computer NetworksWilberforce MurikahNoch keine Bewertungen
- Determining PCB Trace Impedance by TDR: Challenges and Possible SolutionsDokument43 SeitenDetermining PCB Trace Impedance by TDR: Challenges and Possible Solutionspacot24Noch keine Bewertungen
- PRACH - PresentationDokument32 SeitenPRACH - PresentationSukshith ShettyNoch keine Bewertungen
- hw2 SolDokument11 Seitenhw2 SolSaied Aly SalamahNoch keine Bewertungen
- Act 17300Dokument371 SeitenAct 17300muhammad abdussalamNoch keine Bewertungen
- UNIT-2 Signal Analyzers: AF Wave AnalyzerDokument15 SeitenUNIT-2 Signal Analyzers: AF Wave Analyzersonuchary100% (1)
- WI FI VikramDokument13 SeitenWI FI VikramSyed NaseerNoch keine Bewertungen
- Troubleshooting 1 - NOKIADokument13 SeitenTroubleshooting 1 - NOKIAmanu waliaNoch keine Bewertungen
- 03 Data and SignalsDokument40 Seiten03 Data and SignalsKishor KadelNoch keine Bewertungen