Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Ch4 HW2 Homework on Ball-Spring Model and Tension ForcesDokument5 SeitenCh4 HW2 Homework on Ball-Spring Model and Tension ForcesKevin YuanNoch keine Bewertungen
- Lab ReportDokument6 SeitenLab Report'Izzad AfifNoch keine Bewertungen
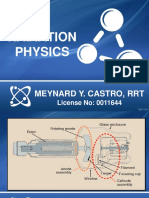
- Radiation Physics: Meynard Y. Castro, RRTDokument84 SeitenRadiation Physics: Meynard Y. Castro, RRTCyrlle Miranda100% (1)
- Geometry For High Speed RailwaysDokument17 SeitenGeometry For High Speed RailwaysRajesh Paralkar100% (1)
- Viva Schedule P2 - CS 13Dokument1 SeiteViva Schedule P2 - CS 13Arnav Anuj KasarNoch keine Bewertungen
- S. No. Centre Member Proposed Speaker Tentative Topic 1 2 3 4Dokument1 SeiteS. No. Centre Member Proposed Speaker Tentative Topic 1 2 3 4Arnav Anuj KasarNoch keine Bewertungen
- Viva Schedule - IT 11 - IT 12 - 21 01 2022Dokument1 SeiteViva Schedule - IT 11 - IT 12 - 21 01 2022Arnav Anuj KasarNoch keine Bewertungen
- 3.flyer - Hands On Design of Composite Beams - JUITDokument1 Seite3.flyer - Hands On Design of Composite Beams - JUITArnav Anuj KasarNoch keine Bewertungen
- Samrat Ashok Technological Institute, Vidisha: Recent PhotoDokument7 SeitenSamrat Ashok Technological Institute, Vidisha: Recent PhotoArnav Anuj KasarNoch keine Bewertungen
- Blood Donation Certificate - AdaniDokument2 SeitenBlood Donation Certificate - AdaniArnav Anuj KasarNoch keine Bewertungen
- Corrigendum RECDokument1 SeiteCorrigendum RECArnav Anuj KasarNoch keine Bewertungen
- IIITN - ANNEXURE 2 - Credit Point Calculation - Arnav Anuj Kasar PDFDokument3 SeitenIIITN - ANNEXURE 2 - Credit Point Calculation - Arnav Anuj Kasar PDFArnav Anuj KasarNoch keine Bewertungen
- IQACAQAR Guideline Autonomous PDFDokument30 SeitenIQACAQAR Guideline Autonomous PDFtarunchatNoch keine Bewertungen
- Terms and Conditions for Faculty RecruitmentDokument4 SeitenTerms and Conditions for Faculty RecruitmentArnav Anuj KasarNoch keine Bewertungen
- Teaching Plan For The Next Three Years: Structural Analysis and Earthquake Engineering. I Would Also Like To Take Up SomeDokument1 SeiteTeaching Plan For The Next Three Years: Structural Analysis and Earthquake Engineering. I Would Also Like To Take Up SomeArnav Anuj KasarNoch keine Bewertungen
- Research Plan For The Next Five YearsDokument3 SeitenResearch Plan For The Next Five YearsArnav Anuj KasarNoch keine Bewertungen
- Lec1 FOJJFDLJDokument31 SeitenLec1 FOJJFDLJ2010civ164Noch keine Bewertungen
- IIT Indore Faculty Recruitment in Civil, Mech, ECE, MathDokument5 SeitenIIT Indore Faculty Recruitment in Civil, Mech, ECE, MathArnav Anuj KasarNoch keine Bewertungen
- 2003-CUREE Excerpt PDFDokument24 Seiten2003-CUREE Excerpt PDFArnav Anuj KasarNoch keine Bewertungen
- A36a36m 11136Dokument3 SeitenA36a36m 11136Arnav Anuj KasarNoch keine Bewertungen
- Large Capacity Reaction FloorWall Assembly for Lateral Load TestingDokument12 SeitenLarge Capacity Reaction FloorWall Assembly for Lateral Load TestingArnav Anuj KasarNoch keine Bewertungen
- Session-July - December 2018: Lab Course FileDokument4 SeitenSession-July - December 2018: Lab Course FileArnav Anuj KasarNoch keine Bewertungen
- Telephone Directory Form ADokument22 SeitenTelephone Directory Form AArnav Anuj KasarNoch keine Bewertungen
- FTD139Dokument16 SeitenFTD139Arnav Anuj KasarNoch keine Bewertungen
- FTD139Dokument16 SeitenFTD139Arnav Anuj KasarNoch keine Bewertungen
- RDSO Testing BrochureDokument4 SeitenRDSO Testing BrochureArnav Anuj KasarNoch keine Bewertungen
- 0093Dokument8 Seiten0093Arnav Anuj KasarNoch keine Bewertungen
- Pages From 2. Earthquake Engineering Theory and Implementation-Second-Edition-International-Code-Council-2006Dokument34 SeitenPages From 2. Earthquake Engineering Theory and Implementation-Second-Edition-International-Code-Council-2006Arnav Anuj KasarNoch keine Bewertungen
- Telephone Directory Form ADokument22 SeitenTelephone Directory Form AArnav Anuj KasarNoch keine Bewertungen
- Ramanuja Gita Bhashya PDFDokument241 SeitenRamanuja Gita Bhashya PDFJSK100% (2)
- Cyclic BehaviorDokument27 SeitenCyclic BehaviorArnav Anuj KasarNoch keine Bewertungen
- Flat Slab DesignDokument76 SeitenFlat Slab Designyunuswsa97% (36)
- Steel Moment FramesDokument6 SeitenSteel Moment FramesLeonardo PimentelNoch keine Bewertungen
- Master Reference ListDokument3 SeitenMaster Reference ListArnav Anuj KasarNoch keine Bewertungen
- San Carlos University of Guatemala Faculty of Engineering School of Sciences Technical language Inga. Soraya Martinez Final project Guatemala. April 22st 2019 Goldberg MachineDokument15 SeitenSan Carlos University of Guatemala Faculty of Engineering School of Sciences Technical language Inga. Soraya Martinez Final project Guatemala. April 22st 2019 Goldberg MachineMaria Renee MiraldaNoch keine Bewertungen
- Evaluation of Welded Clad Pipe PDFDokument120 SeitenEvaluation of Welded Clad Pipe PDFthepcromNoch keine Bewertungen
- Height & Distance-10Dokument26 SeitenHeight & Distance-10mad_sudrocksNoch keine Bewertungen
- IN 227 Control Systems DesignDokument13 SeitenIN 227 Control Systems DesignAbhinavNoch keine Bewertungen
- Dom TutorialDokument7 SeitenDom TutorialsrishashankNoch keine Bewertungen
- Robotics Workshop Practice #1 ReportDokument6 SeitenRobotics Workshop Practice #1 ReportDavid MateusNoch keine Bewertungen
- Mock Exam Revision - Paper 1 Part 2 PDFDokument29 SeitenMock Exam Revision - Paper 1 Part 2 PDFMelia HanumNoch keine Bewertungen
- Chemical Basbvbms of Pharmacology An Introduction To Pharmacodynamics 1000160027Dokument394 SeitenChemical Basbvbms of Pharmacology An Introduction To Pharmacodynamics 1000160027Andres ZareNoch keine Bewertungen
- De Thi ThuDokument8 SeitenDe Thi ThuQuynh TrangNoch keine Bewertungen
- Chemical Reactors - Problems of Reactor Association 47-60: (Exam Jan'09)Dokument6 SeitenChemical Reactors - Problems of Reactor Association 47-60: (Exam Jan'09)Alfredo ZuñigaNoch keine Bewertungen
- Battery Manual en-GAZ1Dokument24 SeitenBattery Manual en-GAZ1Anonymous eOWJ2HNoch keine Bewertungen
- The Initial Stall in Span Wise DirectionDokument8 SeitenThe Initial Stall in Span Wise DirectionpareshnathNoch keine Bewertungen
- VCE Chemistry Unit 3Dokument484 SeitenVCE Chemistry Unit 3Danny GoldstoneNoch keine Bewertungen
- Building Mat 08-09Dokument39 SeitenBuilding Mat 08-09takishiNoch keine Bewertungen
- Physics ElasticityDokument23 SeitenPhysics ElasticityDaniel Danille KristianNoch keine Bewertungen
- Chem-Bonding AnswersDokument31 SeitenChem-Bonding AnswersSahaj SinghNoch keine Bewertungen
- The "Meselson-Stahl Experiment"Dokument5 SeitenThe "Meselson-Stahl Experiment"Atika AnggrainiNoch keine Bewertungen
- Defects in Crystals-Che222Dokument18 SeitenDefects in Crystals-Che222mgfmhcvjhj;Noch keine Bewertungen
- Photon and Quantized EnrgyDokument15 SeitenPhoton and Quantized EnrgykayNoch keine Bewertungen
- Reactor Physics Calculations On Mox Fuel in Boiling Water Reactors (BWRS)Dokument14 SeitenReactor Physics Calculations On Mox Fuel in Boiling Water Reactors (BWRS)Ditzsu tzsuDiNoch keine Bewertungen
- Test For Xii EngkDokument5 SeitenTest For Xii EngkKamran AliNoch keine Bewertungen
- Extreme Grain DeformationDokument36 SeitenExtreme Grain DeformationTao Veloz VazquezNoch keine Bewertungen
- Transport Phenomena CH40102Dokument2 SeitenTransport Phenomena CH40102Moeen Khan RisaldarNoch keine Bewertungen
- Essential University Physics 3rd Edition Richard Wolfson Test BankDokument11 SeitenEssential University Physics 3rd Edition Richard Wolfson Test Bankfelixedanafte5n100% (30)
- GPSA Engineering Data Book 14th Edition: Revision Date Reason (S) For RevisionDokument9 SeitenGPSA Engineering Data Book 14th Edition: Revision Date Reason (S) For Revisionrkm_rkmNoch keine Bewertungen
- Mineral ProcessingDokument10 SeitenMineral ProcessingMahmoud MahmoudmNoch keine Bewertungen