Das könnte Ihnen auch gefallen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
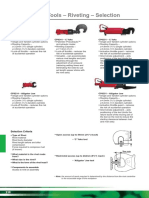
- Compression Tools RivetingDokument8 SeitenCompression Tools RivetingsacalaseniNoch keine Bewertungen
- Stainless Steel I1i1 enDokument6 SeitenStainless Steel I1i1 ensacalaseniNoch keine Bewertungen
- Fire Woodshed PlansDokument1 SeiteFire Woodshed PlanssacalaseniNoch keine Bewertungen
- 300 X 300 X 3Dokument1 Seite300 X 300 X 3sacalaseniNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Enerparc - India - Company Profile - September 23Dokument15 SeitenEnerparc - India - Company Profile - September 23AlokNoch keine Bewertungen
- Income Statement, Its Elements, Usefulness and LimitationsDokument5 SeitenIncome Statement, Its Elements, Usefulness and LimitationsDipika tasfannum salamNoch keine Bewertungen
- Mid Term Exam 1Dokument2 SeitenMid Term Exam 1Anh0% (1)
- Financial Derivatives: Prof. Scott JoslinDokument44 SeitenFinancial Derivatives: Prof. Scott JoslinarnavNoch keine Bewertungen
- The Rise of Populism and The Crisis of Globalization: Brexit, Trump and BeyondDokument11 SeitenThe Rise of Populism and The Crisis of Globalization: Brexit, Trump and Beyondalpha fiveNoch keine Bewertungen
- SCDT0315 PDFDokument80 SeitenSCDT0315 PDFGCMediaNoch keine Bewertungen
- Powerpoint Presentation: Calcium Sulphate in Cement ManufactureDokument7 SeitenPowerpoint Presentation: Calcium Sulphate in Cement ManufactureDhruv PrajapatiNoch keine Bewertungen
- Unit 1Dokument3 SeitenUnit 1beharenbNoch keine Bewertungen
- TSB 120Dokument7 SeitenTSB 120patelpiyushbNoch keine Bewertungen
- Ajp Project (1) MergedDokument22 SeitenAjp Project (1) MergedRohit GhoshtekarNoch keine Bewertungen
- 4th Sem Electrical AliiedDokument1 Seite4th Sem Electrical AliiedSam ChavanNoch keine Bewertungen
- Lockbox Br100 v1.22Dokument36 SeitenLockbox Br100 v1.22Manoj BhogaleNoch keine Bewertungen
- Profile On Sheep and Goat FarmDokument14 SeitenProfile On Sheep and Goat FarmFikirie MogesNoch keine Bewertungen
- How To Create A Powerful Brand Identity (A Step-by-Step Guide) PDFDokument35 SeitenHow To Create A Powerful Brand Identity (A Step-by-Step Guide) PDFCaroline NobreNoch keine Bewertungen
- Simoreg ErrorDokument30 SeitenSimoreg Errorphth411Noch keine Bewertungen
- Gender Ratio of TeachersDokument80 SeitenGender Ratio of TeachersT SiddharthNoch keine Bewertungen
- Star Link SafetyDokument2 SeitenStar Link SafetyJeronimo FernandezNoch keine Bewertungen
- BYJU's July PayslipDokument2 SeitenBYJU's July PayslipGopi ReddyNoch keine Bewertungen
- Review of Related LiteratureDokument4 SeitenReview of Related LiteratureCarlo Mikhail Santiago25% (4)
- Water Hookup Kit User Manual (For L20 Ultra - General (Except EU&US)Dokument160 SeitenWater Hookup Kit User Manual (For L20 Ultra - General (Except EU&US)Aldrian PradanaNoch keine Bewertungen
- JAZEL Resume-2-1-2-1-3-1Dokument2 SeitenJAZEL Resume-2-1-2-1-3-1GirlieJoyGayoNoch keine Bewertungen
- SME-Additional Matter As Per Latest Syllabus Implementation WorkshopDokument14 SeitenSME-Additional Matter As Per Latest Syllabus Implementation WorkshopAvijeet BanerjeeNoch keine Bewertungen
- PFI High Flow Series Single Cartridge Filter Housing For CleaningDokument2 SeitenPFI High Flow Series Single Cartridge Filter Housing For Cleaningbennypartono407Noch keine Bewertungen
- Engine Diesel PerfomanceDokument32 SeitenEngine Diesel PerfomancerizalNoch keine Bewertungen
- CSEC Jan 2011 Paper 1Dokument8 SeitenCSEC Jan 2011 Paper 1R.D. KhanNoch keine Bewertungen
- Ishares Core S&P/TSX Capped Composite Index Etf: Key FactsDokument2 SeitenIshares Core S&P/TSX Capped Composite Index Etf: Key FactsChrisNoch keine Bewertungen
- Unit-5 Shell ProgrammingDokument11 SeitenUnit-5 Shell ProgrammingLinda BrownNoch keine Bewertungen
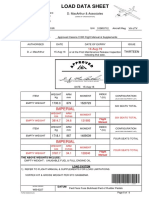
- Load Data Sheet: ImperialDokument3 SeitenLoad Data Sheet: ImperialLaurean Cub BlankNoch keine Bewertungen
- LOG-2-8-FLEETWAREHOUSE-TEMPLATE-Waybill-Delivery Note-IFRCDokument1 SeiteLOG-2-8-FLEETWAREHOUSE-TEMPLATE-Waybill-Delivery Note-IFRCMNoch keine Bewertungen
- LMU-2100™ Gprs/Cdmahspa Series: Insurance Tracking Unit With Leading TechnologiesDokument2 SeitenLMU-2100™ Gprs/Cdmahspa Series: Insurance Tracking Unit With Leading TechnologiesRobert MateoNoch keine Bewertungen