Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- OFF-LINE Registration Form: 3 International Conference On Microwave and Photonics (ICMAP) - 2018Dokument1 SeiteOFF-LINE Registration Form: 3 International Conference On Microwave and Photonics (ICMAP) - 2018avi0341Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Cryptographic Hash FunctionsDokument55 SeitenCryptographic Hash Functionsavi0341Noch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Hash Functions: A Gentle Introduction: Palash SarkarDokument74 SeitenHash Functions: A Gentle Introduction: Palash Sarkaravi0341Noch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- At The Time of Admission or Latest by September 15, 2016Dokument1 SeiteAt The Time of Admission or Latest by September 15, 2016avi0341Noch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Role of Wickability On The Critical Heat Flux of Structured Superhydrophilic SurfacesDokument10 SeitenRole of Wickability On The Critical Heat Flux of Structured Superhydrophilic Surfacesavi0341Noch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Studies On Cryptosystem by Applying Chaos: Avishek KumarDokument1 SeiteStudies On Cryptosystem by Applying Chaos: Avishek Kumaravi0341Noch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Notice M.tech. (MKM)Dokument1 SeiteNotice M.tech. (MKM)avi0341Noch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Shift-Tolerance Property of An Optical Double-Random Phase-Encoding Encryption SystemDokument7 SeitenShift-Tolerance Property of An Optical Double-Random Phase-Encoding Encryption Systemavi0341Noch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- An Introduction To Cryptography and Digital Signatures: Author: Ian Curry March 2001Dokument6 SeitenAn Introduction To Cryptography and Digital Signatures: Author: Ian Curry March 2001avi0341Noch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Energies: Battery Management Systems in Electric and Hybrid VehiclesDokument18 SeitenEnergies: Battery Management Systems in Electric and Hybrid Vehiclesavi0341Noch keine Bewertungen
- Hindi Poems and Motivation PDFDokument6 SeitenHindi Poems and Motivation PDFavi0341Noch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Department of Instrumention Science University of Pune List of JournalDokument2 SeitenDepartment of Instrumention Science University of Pune List of Journalavi0341Noch keine Bewertungen
- Compressive Optical Image Encryption: Jun Li, Jiao Sheng Li, Yang Yang Pan & Rong LiDokument10 SeitenCompressive Optical Image Encryption: Jun Li, Jiao Sheng Li, Yang Yang Pan & Rong Liavi0341Noch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Motivation: 100584R - W.A.H.R.WeerathungeDokument2 SeitenMotivation: 100584R - W.A.H.R.Weerathungeavi0341Noch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- El Gamal PDFDokument2 SeitenEl Gamal PDFavi0341Noch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Rotary Club of Asansol: 3240 R I DistrictDokument4 SeitenRotary Club of Asansol: 3240 R I Districtavi0341Noch keine Bewertungen
- HTCH QR$ S (F-/E-Mail: QffiffirDokument2 SeitenHTCH QR$ S (F-/E-Mail: Qffiffiravi0341Noch keine Bewertungen
- MidSem 2016Dokument2 SeitenMidSem 2016avi0341Noch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- ReadMe PDFDokument2 SeitenReadMe PDFavi0341Noch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Death Related EncountersDokument4 SeitenDeath Related Encountersavi034167% (3)
- Agency Canvas Ing PresentationDokument27 SeitenAgency Canvas Ing Presentationkhushi jaiswalNoch keine Bewertungen
- Production of Bioethanol From Empty Fruit Bunch (Efb) of Oil PalmDokument26 SeitenProduction of Bioethanol From Empty Fruit Bunch (Efb) of Oil PalmcelestavionaNoch keine Bewertungen
- Blockchains: Architecture, Design and Use CasesDokument26 SeitenBlockchains: Architecture, Design and Use Caseseira kNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Practising Modern English For Life Sciences Students Caiet Exercitii-1Dokument77 SeitenPractising Modern English For Life Sciences Students Caiet Exercitii-1Robert BobiaNoch keine Bewertungen
- JFC 180BBDokument2 SeitenJFC 180BBnazmulNoch keine Bewertungen
- 2 To 20 Years - Girls Stature-For-Age and Weight-For-Age PercentilesDokument1 Seite2 To 20 Years - Girls Stature-For-Age and Weight-For-Age PercentilesRajalakshmi Vengadasamy0% (1)
- Automatic Gearbox ZF 4HP 20Dokument40 SeitenAutomatic Gearbox ZF 4HP 20Damien Jorgensen100% (3)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Form Expense ClaimDokument2 SeitenForm Expense Claimviedelamonde_3868443Noch keine Bewertungen
- 3 Diversion&CareDokument2 Seiten3 Diversion&CareRyan EncomiendaNoch keine Bewertungen
- VMP 930 Veterinary Parasitology: Paragonimus KellicottiDokument63 SeitenVMP 930 Veterinary Parasitology: Paragonimus KellicottiRenien Khim BahayaNoch keine Bewertungen
- Faa Data On B 777 PDFDokument104 SeitenFaa Data On B 777 PDFGurudutt PaiNoch keine Bewertungen
- CAA Safety Plan 2011 To 2013Dokument46 SeitenCAA Safety Plan 2011 To 2013cookie01543Noch keine Bewertungen
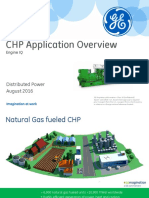
- 52 - JB CHP Trigen - V01Dokument33 Seiten52 - JB CHP Trigen - V01July E. Maldonado M.Noch keine Bewertungen
- Recruitment SelectionDokument11 SeitenRecruitment SelectionMOHAMMED KHAYYUMNoch keine Bewertungen
- Introduction To DifferentiationDokument10 SeitenIntroduction To DifferentiationaurennosNoch keine Bewertungen
- When A Snobbish Gangster Meets A Pervert CassanovaDokument62 SeitenWhen A Snobbish Gangster Meets A Pervert CassanovaMaria Shiela Mae Baratas100% (1)
- Axera D06Dokument2 SeitenAxera D06Cristián Fernando Cristóbal RoblesNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Feed-Pump Hydraulic Performance and Design Improvement, Phase I: J2esearch Program DesignDokument201 SeitenFeed-Pump Hydraulic Performance and Design Improvement, Phase I: J2esearch Program DesignJonasNoch keine Bewertungen
- DFo 2 1Dokument15 SeitenDFo 2 1Donna HernandezNoch keine Bewertungen
- ETAP Power Station ErrorDokument5 SeitenETAP Power Station ErroryogacruiseNoch keine Bewertungen
- Ci Thai RiceDokument4 SeitenCi Thai RiceMakkah Madina riceNoch keine Bewertungen
- Biology Key Stage 4 Lesson PDFDokument4 SeitenBiology Key Stage 4 Lesson PDFAleesha AshrafNoch keine Bewertungen
- Introduction - Livspace - RenoDokument12 SeitenIntroduction - Livspace - RenoMêghnâ BîswâsNoch keine Bewertungen
- Module6 Quiz1Dokument4 SeitenModule6 Quiz1karthik1555Noch keine Bewertungen
- Moquerio - Defense Mechanism ActivityDokument3 SeitenMoquerio - Defense Mechanism ActivityRoxan MoquerioNoch keine Bewertungen
- Seabank Statement 20220726Dokument4 SeitenSeabank Statement 20220726Alesa WahabappNoch keine Bewertungen
- Computers in Industry: Hugh Boyes, Bil Hallaq, Joe Cunningham, Tim Watson TDokument12 SeitenComputers in Industry: Hugh Boyes, Bil Hallaq, Joe Cunningham, Tim Watson TNawabMasidNoch keine Bewertungen
- How To Convert Files To Binary FormatDokument1 SeiteHow To Convert Files To Binary FormatAhmed Riyadh100% (1)
- Curriculum Guide Ay 2021-2022: Dr. Gloria Lacson Foundation Colleges, IncDokument9 SeitenCurriculum Guide Ay 2021-2022: Dr. Gloria Lacson Foundation Colleges, IncJean Marie Itang GarciaNoch keine Bewertungen
- Case Study Single Sign On Solution Implementation Software Luxoft For Ping IdentityDokument5 SeitenCase Study Single Sign On Solution Implementation Software Luxoft For Ping IdentityluxoftNoch keine Bewertungen
- The Future of Geography: How the Competition in Space Will Change Our WorldVon EverandThe Future of Geography: How the Competition in Space Will Change Our WorldBewertung: 4 von 5 Sternen4/5 (6)
- Generative AI: The Insights You Need from Harvard Business ReviewVon EverandGenerative AI: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyVon EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyBewertung: 3.5 von 5 Sternen3.5/5 (111)