Das könnte Ihnen auch gefallen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- AUTO CONTROLLER FOR PETROL (Revised)Dokument25 SeitenAUTO CONTROLLER FOR PETROL (Revised)Hamed RazaNoch keine Bewertungen
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDokument14 SeitenAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNoch keine Bewertungen
- 555 Applications NoteDokument19 Seiten555 Applications NoteIsaac Herrera100% (1)
- (212142518) Stepper Motor Control Using MicrocontrollerDokument4 Seiten(212142518) Stepper Motor Control Using MicrocontrollerraghavthakurjiNoch keine Bewertungen
- 555 Timer PDFDokument76 Seiten555 Timer PDFronaldo19940% (1)
- LM555 Single Timer: Features DescriptionDokument13 SeitenLM555 Single Timer: Features Descriptionduy2706Noch keine Bewertungen
- 555 TimerDokument76 Seiten555 TimerSai Krishna KodaliNoch keine Bewertungen
- Timer Ic Switch Using 555: Experiment #4Dokument7 SeitenTimer Ic Switch Using 555: Experiment #4Zeeshan RafiqNoch keine Bewertungen
- Automatic Ic Control of 3 Phase MotorsDokument5 SeitenAutomatic Ic Control of 3 Phase Motorsಶ್ರೀಕಾಂತ್ ತಿಪ್ಪೇರುದ್ರಪ್ಪNoch keine Bewertungen
- 555 Timer Operation With Internal CircuitDokument9 Seiten555 Timer Operation With Internal Circuitjanakiram473Noch keine Bewertungen
- LM555 Timer: General Description FeaturesDokument12 SeitenLM555 Timer: General Description FeaturesMark J A. OkyoNoch keine Bewertungen
- LM555 Timer: Literature Number: SNAS548BDokument14 SeitenLM555 Timer: Literature Number: SNAS548BKenly WallNoch keine Bewertungen
- Adjustable Timer Circuit Diagram With Relay OutputDokument3 SeitenAdjustable Timer Circuit Diagram With Relay Outputtim schroder100% (1)
- 00 Table of ContentsDokument26 Seiten00 Table of ContentsNana Agyeman AntwiNoch keine Bewertungen
- Single Timer: Features DescriptionDokument13 SeitenSingle Timer: Features DescriptionRicardo Pasquati PontarolliNoch keine Bewertungen
- PWM DC Motor Speed Control Using 555Dokument16 SeitenPWM DC Motor Speed Control Using 555Karthik Dm67% (3)
- What Is The 555 Timer?: Philips Components and Semiconductors AustraliaDokument15 SeitenWhat Is The 555 Timer?: Philips Components and Semiconductors AustraliaLorena RabinoNoch keine Bewertungen
- 555 PDFDokument14 Seiten555 PDFvpsampathNoch keine Bewertungen
- Introduction To Timer IC 555 & Its ApplicationsDokument13 SeitenIntroduction To Timer IC 555 & Its ApplicationsSamuditha YatiwellaNoch keine Bewertungen
- Control Systems Lab ManualDokument67 SeitenControl Systems Lab ManualRockstar Rich100% (1)
- MCGG OcrDokument14 SeitenMCGG OcrAgus BuchariNoch keine Bewertungen
- Introduction To IC 555 TimerDokument66 SeitenIntroduction To IC 555 TimermuraliNoch keine Bewertungen
- Paper 78Dokument8 SeitenPaper 78Sanker VikramNoch keine Bewertungen
- Design and Fabrication of 3-Phase Ac Voltage Controller Fed Speed Control of 3-Phase Sqim L. Joseph Anil Kumar B. Krishna ChaitanyaDokument5 SeitenDesign and Fabrication of 3-Phase Ac Voltage Controller Fed Speed Control of 3-Phase Sqim L. Joseph Anil Kumar B. Krishna ChaitanyaSahabat SimatupangNoch keine Bewertungen
- Single Phase Motor Controller For Washing Machine ApplicationDokument3 SeitenSingle Phase Motor Controller For Washing Machine ApplicationVenkata Rajkumar ChNoch keine Bewertungen
- LIC Unit IVDokument32 SeitenLIC Unit IVDINESH KUMAR DRAVIDAMANINoch keine Bewertungen
- Automatic Speed Control For Fans and CoolersDokument24 SeitenAutomatic Speed Control For Fans and CoolersMaddula SriluNoch keine Bewertungen
- MCVG 61Dokument10 SeitenMCVG 61Joel FigueroaNoch keine Bewertungen
- lm555 DatasheetDokument11 Seitenlm555 DatasheetKhu GhingNoch keine Bewertungen
- UC3845 Technical ExplanationDokument15 SeitenUC3845 Technical ExplanationankurmalviyaNoch keine Bewertungen
- 555 Timer and Its ApplicationsDokument48 Seiten555 Timer and Its ApplicationsJohnny Walker100% (8)
- Humidity ControllerDokument12 SeitenHumidity ControllerPooja GautamNoch keine Bewertungen
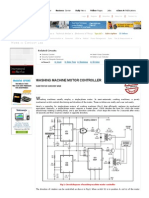
- Washing Machine Motor ControllerDokument3 SeitenWashing Machine Motor ControllerprabhyodhNoch keine Bewertungen
- Practical Application of Timer ICDokument5 SeitenPractical Application of Timer ICManojkumarNoch keine Bewertungen
- Lm555 555c TimerDokument12 SeitenLm555 555c TimerAlexis Orellana VediaNoch keine Bewertungen
- Microcontroller Based Speed Cntrol SystemDokument3 SeitenMicrocontroller Based Speed Cntrol Systemvinovictory8571Noch keine Bewertungen
- Electronics Projects Farhan ShakeelDokument236 SeitenElectronics Projects Farhan Shakeelfarhanshakeel100% (2)
- DC Motor Control ReportDokument21 SeitenDC Motor Control ReportNishant SinghNoch keine Bewertungen
- BUCK Driver: MicroprocessorDokument9 SeitenBUCK Driver: MicroprocessorMehroz KhanNoch keine Bewertungen
- UtbsDokument41 SeitenUtbsGaurav ChauhaanNoch keine Bewertungen
- BUCK Driver: MicroprocessorDokument9 SeitenBUCK Driver: MicroprocessorMehroz KhanNoch keine Bewertungen
- 555 Timer Monostable OperationDokument13 Seiten555 Timer Monostable OperationGrigore ManNoch keine Bewertungen
- Pe Seminar - 2Dokument7 SeitenPe Seminar - 2Abishek ReddyNoch keine Bewertungen
- UNIT-4 Special Ics The 555 Timer IcDokument10 SeitenUNIT-4 Special Ics The 555 Timer IcVerloves LoveNoch keine Bewertungen
- 555 Integrated Circuit (Timer Operation)Dokument5 Seiten555 Integrated Circuit (Timer Operation)Geet SehgalNoch keine Bewertungen
- MC3423 DDokument10 SeitenMC3423 DBryan PittmanNoch keine Bewertungen
- Lic Eec-501 Notes Unit5 Iftm UniversityDokument14 SeitenLic Eec-501 Notes Unit5 Iftm UniversitySougata GhoshNoch keine Bewertungen
- A Multi Vibrator Is An Electronic Circuit Used To Implement ADokument5 SeitenA Multi Vibrator Is An Electronic Circuit Used To Implement AbulkSoftNoch keine Bewertungen
- El Timer 555 PDFDokument28 SeitenEl Timer 555 PDFAnonymous 1LD5bpJ15dNoch keine Bewertungen
- SPEED CONTROL OF SINGLE PHASE INDUCTION MOTOR" BY USING TRIAC - PPTDokument30 SeitenSPEED CONTROL OF SINGLE PHASE INDUCTION MOTOR" BY USING TRIAC - PPTGökhan KAYA100% (2)
- The DC MOTOR SPEED CONTROL Circuit Is Primarily A 555 IC Based PWMDokument3 SeitenThe DC MOTOR SPEED CONTROL Circuit Is Primarily A 555 IC Based PWMSahil DhirNoch keine Bewertungen
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkVon EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNoch keine Bewertungen
- Power Systems-On-Chip: Practical Aspects of DesignVon EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNoch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Bewertung: 2.5 von 5 Sternen2.5/5 (3)
- 110 Waveform Generator Projects for the Home ConstructorVon Everand110 Waveform Generator Projects for the Home ConstructorBewertung: 4 von 5 Sternen4/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNoch keine Bewertungen
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetVon EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetBewertung: 2 von 5 Sternen2/5 (1)
- Genco 3Dokument30 SeitenGenco 3Junaid IqbalNoch keine Bewertungen
- Katara Celebrations During The World Cup 2022Dokument12 SeitenKatara Celebrations During The World Cup 2022Muhammad NaeemNoch keine Bewertungen
- Today Cable PlanDokument2 SeitenToday Cable PlanMuhammad NaeemNoch keine Bewertungen
- CV Sample PDFDokument1 SeiteCV Sample PDFMuhammad NaeemNoch keine Bewertungen
- HHHDokument1 SeiteHHHMuhammad NaeemNoch keine Bewertungen
- CANDIDATE-APPLICATION-FORM 2019 Germany PDFDokument1 SeiteCANDIDATE-APPLICATION-FORM 2019 Germany PDFsaqlain aNoch keine Bewertungen
- Hs - 02 Nasp Advanced Safety Health2Dokument4 SeitenHs - 02 Nasp Advanced Safety Health2Muhammad NaeemNoch keine Bewertungen
- Active and Passive Filter Synthesis Using MatlabDokument11 SeitenActive and Passive Filter Synthesis Using MatlabShreyash SillNoch keine Bewertungen
- Chinese UniversitiesDokument10 SeitenChinese UniversitiesAnyak2014Noch keine Bewertungen
- SSQP 116Dokument32 SeitenSSQP 116gideontargrave7Noch keine Bewertungen
- Basic Laplace Theory - LDokument13 SeitenBasic Laplace Theory - LMuhammad NaeemNoch keine Bewertungen
- Powe Supply Guidelines For Major Project June 2014Dokument21 SeitenPowe Supply Guidelines For Major Project June 2014Muhammad NaeemNoch keine Bewertungen
- Lab Manual 2: Embedded Systems DesignDokument3 SeitenLab Manual 2: Embedded Systems DesignMuhammad NaeemNoch keine Bewertungen
- Haar FunctionsDokument27 SeitenHaar FunctionsMuhammad NaeemNoch keine Bewertungen
- ADDC Electricity Wiring Regulations - Mar.2014Dokument276 SeitenADDC Electricity Wiring Regulations - Mar.2014hajimak89% (18)
- Electrical Manual L20077Dokument40 SeitenElectrical Manual L20077Phyllis BogleNoch keine Bewertungen
- GP130 HeatersDokument4 SeitenGP130 HeatersMuhammad NaeemNoch keine Bewertungen
- Fuzzy Logic Mesin CuciDokument5 SeitenFuzzy Logic Mesin Cuciputra-tzuNoch keine Bewertungen
- Civil Defense Training School LahoreDokument1 SeiteCivil Defense Training School LahoreMuhammad NaeemNoch keine Bewertungen
- Cost of Living in Mianyang, Sichuan, ChinaDokument2 SeitenCost of Living in Mianyang, Sichuan, ChinaMuhammad NaeemNoch keine Bewertungen
- A-1 Electricals Dewa Approval On Industrial Cable Gland For 132kv Sub StationDokument11 SeitenA-1 Electricals Dewa Approval On Industrial Cable Gland For 132kv Sub StationMuhammad NaeemNoch keine Bewertungen
- PVC Insulated Wiring Cables 2012Dokument11 SeitenPVC Insulated Wiring Cables 2012prabhakaran_hdecNoch keine Bewertungen
- Electrical Engineering 2008Dokument100 SeitenElectrical Engineering 2008Ateeb AkmalNoch keine Bewertungen
- Diagram.: From Mains From GeneratorDokument1 SeiteDiagram.: From Mains From GeneratorMuhammad NaeemNoch keine Bewertungen
- DWC ResidentialDistrict PlanningRegulations&DevelopmentGuidelines 012009Dokument50 SeitenDWC ResidentialDistrict PlanningRegulations&DevelopmentGuidelines 012009elsayedamrNoch keine Bewertungen
- Attachments Supply Electricity WaterDokument5 SeitenAttachments Supply Electricity WaterMuhammad NaeemNoch keine Bewertungen
- Lpfdesign FilterDokument30 SeitenLpfdesign FilterMuhammad NaeemNoch keine Bewertungen
- 3P8 1416Dokument5 Seiten3P8 1416Muhammad NaeemNoch keine Bewertungen
- Butterworth Filter DesignDokument0 SeitenButterworth Filter DesignAnkit ChudrahiNoch keine Bewertungen
- Sir VisvesvarayyaDokument1 SeiteSir VisvesvarayyaJohn SparrowNoch keine Bewertungen
- Parking BrakeDokument16 SeitenParking BrakeDat100% (1)
- q64DA PDFDokument1 Seiteq64DA PDFSebastián LozadaNoch keine Bewertungen
- UD150L-40E Ope M501-E053GDokument164 SeitenUD150L-40E Ope M501-E053GMahmoud Mady100% (3)
- Catalogo MQ HDG SsDokument56 SeitenCatalogo MQ HDG SsMiguel CamargoNoch keine Bewertungen
- Materials Science and Engineering.: Session 9 - The Eutectic Phase DiagramsDokument34 SeitenMaterials Science and Engineering.: Session 9 - The Eutectic Phase DiagramsfiestapaganaNoch keine Bewertungen
- RT-161 A1 PDFDokument8 SeitenRT-161 A1 PDFRaul Diaz100% (1)
- Power SteeringDokument31 SeitenPower SteeringpeskeirasNoch keine Bewertungen
- VAV CablingDokument2 SeitenVAV Cablingsripriya01Noch keine Bewertungen
- DocumentationDokument131 SeitenDocumentationm_adnane_dz3184Noch keine Bewertungen
- Octagonal Blender PDFDokument4 SeitenOctagonal Blender PDFMohsinShaikhNoch keine Bewertungen
- FRAP AssayDokument2 SeitenFRAP AssayMayank Tandon94% (17)
- Unit 1 Vehicle Components - BackDokument20 SeitenUnit 1 Vehicle Components - BackCarlos CabreraNoch keine Bewertungen
- Features: Self Reset Auxiliary Flag Relay - Two ElementDokument3 SeitenFeatures: Self Reset Auxiliary Flag Relay - Two ElementbledmikifrNoch keine Bewertungen
- 08aa301 Engineering Mathematics - IIIDokument2 Seiten08aa301 Engineering Mathematics - IIIVIGNESH L R60% (5)
- M795 Spare PartsDokument139 SeitenM795 Spare Partsวิรัตน์ อัครอภิโภคีNoch keine Bewertungen
- South Asia On ShortwaveDokument15 SeitenSouth Asia On ShortwaveKasi XswlNoch keine Bewertungen
- Microgels As Model Colloids Adv. Colloid. Interface Sci. 1999 SaundersDokument25 SeitenMicrogels As Model Colloids Adv. Colloid. Interface Sci. 1999 SaundersKevin PascualNoch keine Bewertungen
- Drying Kinetics and Characteristic Drying Curve of Lightly Salted Sardine (Sardinella Aurita)Dokument8 SeitenDrying Kinetics and Characteristic Drying Curve of Lightly Salted Sardine (Sardinella Aurita)Nguyen Thu HaNoch keine Bewertungen
- C Aj 1609Dokument2 SeitenC Aj 1609vhin84Noch keine Bewertungen
- ChemicalEq DroppersDokument13 SeitenChemicalEq DroppersUtkarsh SharmaNoch keine Bewertungen
- Peri Up Flex Core ComponentsDokument50 SeitenPeri Up Flex Core ComponentsDavid BourcetNoch keine Bewertungen
- Chapter3-Alkenes and CycloalkenesDokument73 SeitenChapter3-Alkenes and CycloalkenesIain Choong WKNoch keine Bewertungen
- Brushbond Ultraflex BFLDokument2 SeitenBrushbond Ultraflex BFLpeashNoch keine Bewertungen
- I20 Key Features Technical Specifications: DimensionsDokument4 SeitenI20 Key Features Technical Specifications: Dimensionsvaibhavsaini88Noch keine Bewertungen
- Hydrographic Survey: Ecg 305: Chapter 7Dokument24 SeitenHydrographic Survey: Ecg 305: Chapter 7Ahmad ZahirNoch keine Bewertungen
- Microsoft SQL Server 2005 Express Edition &Dokument95 SeitenMicrosoft SQL Server 2005 Express Edition &lgmep350Noch keine Bewertungen
- Is 2571-1970Dokument27 SeitenIs 2571-1970Deboline MitraNoch keine Bewertungen
- V 112Dokument4 SeitenV 112simon_someone217Noch keine Bewertungen
- Transmission - Approved List 26-09-2017Dokument554 SeitenTransmission - Approved List 26-09-2017bkhNoch keine Bewertungen