Das könnte Ihnen auch gefallen
- Guide 8 - RAPID Programming LanguageDokument44 SeitenGuide 8 - RAPID Programming LanguageAna Julia AndradeNoch keine Bewertungen
- Pt31 COSIMIR EducationalDokument27 SeitenPt31 COSIMIR EducationalclaromeisNoch keine Bewertungen
- LECTURE - 08-Robot ProgrammingDokument19 SeitenLECTURE - 08-Robot Programmingking0o0.652Noch keine Bewertungen
- Scorbot Er 4uDokument12 SeitenScorbot Er 4uYogeshSinghLatherNoch keine Bewertungen
- Rapid ProgrammingDokument18 SeitenRapid ProgrammingCarlosNoch keine Bewertungen
- Tutorial 5 Robot Studio - IO SignalsDokument8 SeitenTutorial 5 Robot Studio - IO SignalsadilsonnjNoch keine Bewertungen
- Roboplus TutorialDokument71 SeitenRoboplus Tutorialrnepology100% (3)
- Tutorial Active RobotDokument11 SeitenTutorial Active RobotClaudio Rodríguez100% (1)
- ABB Basic: Trường Đại học Bách khoa Hà NộiDokument30 SeitenABB Basic: Trường Đại học Bách khoa Hà NộiVăn Trường NguyễnNoch keine Bewertungen
- Lab manuals-CIM LabDokument34 SeitenLab manuals-CIM LabzxcvbnmNoch keine Bewertungen
- Teach Pendant Programming 2020Dokument64 SeitenTeach Pendant Programming 2020Sky CarrilNoch keine Bewertungen
- Robotic Arm Manipulation - MUGUNTHANDokument7 SeitenRobotic Arm Manipulation - MUGUNTHANMugun ThanNoch keine Bewertungen
- Moving Platforms and Checkpoints Teacher Guide q1 2022 2f356e3d2d06Dokument23 SeitenMoving Platforms and Checkpoints Teacher Guide q1 2022 2f356e3d2d06Daniel Sánchez Jiménez-PajareroNoch keine Bewertungen
- Unit Ii Robotic: Practice 1Dokument17 SeitenUnit Ii Robotic: Practice 1Cinthya CoronaNoch keine Bewertungen
- Introduction To Logixpro - Lab: PurposeDokument8 SeitenIntroduction To Logixpro - Lab: PurposeAli JawadNoch keine Bewertungen
- Introduction To Logixpro - Lab: PurposeDokument8 SeitenIntroduction To Logixpro - Lab: PurposeAli JawadNoch keine Bewertungen
- RobotHandbook PDFDokument12 SeitenRobotHandbook PDFToscotronixNoch keine Bewertungen
- Robotics Lab Report Group 8 PDFDokument16 SeitenRobotics Lab Report Group 8 PDFSourabh AgrawalNoch keine Bewertungen
- Menu Driven Control of The Mini Mover 5 Robot PDFDokument5 SeitenMenu Driven Control of The Mini Mover 5 Robot PDFLita Eduard ConstantinNoch keine Bewertungen
- Rhinoceros: Academic Year 2010/2011Dokument68 SeitenRhinoceros: Academic Year 2010/2011Miguel RebeloNoch keine Bewertungen
- Lab 3 RoboticsDokument35 SeitenLab 3 RoboticsWafiNoch keine Bewertungen
- Primeros EjrcicosDokument9 SeitenPrimeros EjrcicosRodrigo Alonso Ayala BelisarioNoch keine Bewertungen
- EPSON Scara Robot User DocumentationDokument16 SeitenEPSON Scara Robot User Documentationmarkus_stark3137Noch keine Bewertungen
- RoboticsDokument26 SeitenRoboticsmkmnawaz972Noch keine Bewertungen
- Robotics SeminarDokument38 SeitenRobotics SeminarMohamed AbdirahmanNoch keine Bewertungen
- How To Start A Scobot III Level 5Dokument6 SeitenHow To Start A Scobot III Level 5nishant1984Noch keine Bewertungen
- Robotmaster Tutorials V3.0.1200.1Dokument204 SeitenRobotmaster Tutorials V3.0.1200.1phutthawongdanchai041215Noch keine Bewertungen
- Logixpro ManualDokument10 SeitenLogixpro ManualSobiNoch keine Bewertungen
- Robotics Programming and ApplicationsDokument35 SeitenRobotics Programming and Applicationssuneel kumar rathoreNoch keine Bewertungen
- Using An External TCP: Visual Components 4.1 Version: November 7, 2018Dokument24 SeitenUsing An External TCP: Visual Components 4.1 Version: November 7, 2018anupNoch keine Bewertungen
- Basics of Debugging in SAPDokument12 SeitenBasics of Debugging in SAPriteshNoch keine Bewertungen
- LogixPro Intro LabDokument10 SeitenLogixPro Intro LabJuan Carlos GonzálezNoch keine Bewertungen
- Curso Basico MastercamDokument38 SeitenCurso Basico MastercamAbraham GrimNoch keine Bewertungen
- Multi Axis Lesson 1Dokument41 SeitenMulti Axis Lesson 1Packo PerezNoch keine Bewertungen
- MastercamX7 Intro To Multiaxis Bai 2Dokument38 SeitenMastercamX7 Intro To Multiaxis Bai 2MastercamToolpathNoch keine Bewertungen
- Robotic Pw1Dokument7 SeitenRobotic Pw1AKMAL HAKIMINoch keine Bewertungen
- Practice 3 Robot PracticeDokument11 SeitenPractice 3 Robot PracticeCamilo HerreraNoch keine Bewertungen
- Robotics Programming and ApplicationsDokument38 SeitenRobotics Programming and ApplicationsShanti Lal MeenaNoch keine Bewertungen
- Industrial Robot Laboratory StaeubliDokument17 SeitenIndustrial Robot Laboratory StaeubliJesus Said Mercado VegaNoch keine Bewertungen
- Scorbot TutorialDokument9 SeitenScorbot TutorialPeru HayaNoch keine Bewertungen
- First Steps With CodesysDokument10 SeitenFirst Steps With CodesystynizNoch keine Bewertungen
- Dr. Shuguang Li and Associates: Interactive Groundwater Modeling 3 (Igw 3) Quick TutorialDokument3 SeitenDr. Shuguang Li and Associates: Interactive Groundwater Modeling 3 (Igw 3) Quick TutorialmikiprofaNoch keine Bewertungen
- CoSpace Rescue 2014 - Getting StartedDokument10 SeitenCoSpace Rescue 2014 - Getting StartedDanijel RakićNoch keine Bewertungen
- Moving Platforms and Checkpoints Student Guide q1 2022 0ec15ce5e3a1Dokument23 SeitenMoving Platforms and Checkpoints Student Guide q1 2022 0ec15ce5e3a1Daniel Sánchez Jiménez-PajareroNoch keine Bewertungen
- CIM Lab Tasks According To Lab ExercisesDokument5 SeitenCIM Lab Tasks According To Lab Exercisessaadbinsadaqat123456Noch keine Bewertungen
- Running Your Program Files On The Kuka RobotDokument8 SeitenRunning Your Program Files On The Kuka RobotPablo Moises Lucero OtorongoNoch keine Bewertungen
- Robix Familiarisation Guide: School of Information Technology and Engineering University of OttawaDokument14 SeitenRobix Familiarisation Guide: School of Information Technology and Engineering University of OttawaYen BaoNoch keine Bewertungen
- Control of A Minisumo Robot - CompressDokument7 SeitenControl of A Minisumo Robot - CompressElvio LaoNoch keine Bewertungen
- Pro-E Part 2Dokument20 SeitenPro-E Part 2sjaichandranNoch keine Bewertungen
- Autocad Project ReportDokument44 SeitenAutocad Project ReportSanjay Rawat0% (1)
- Tutorial Win Pro LadderDokument32 SeitenTutorial Win Pro Ladderkiedinho100% (2)
- Hacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesVon EverandHacks To Crush Plc Program Fast & Efficiently Everytime... : Coding, Simulating & Testing Programmable Logic Controller With ExamplesBewertung: 5 von 5 Sternen5/5 (1)
- SolidWorks 2016 Learn by doing 2016 - Part 3Von EverandSolidWorks 2016 Learn by doing 2016 - Part 3Bewertung: 3.5 von 5 Sternen3.5/5 (3)
- NX 9 for Beginners - Part 3 (Additional Features and Multibody Parts, Modifying Parts)Von EverandNX 9 for Beginners - Part 3 (Additional Features and Multibody Parts, Modifying Parts)Noch keine Bewertungen
- Android Design Patterns: Interaction Design Solutions for DevelopersVon EverandAndroid Design Patterns: Interaction Design Solutions for DevelopersBewertung: 4.5 von 5 Sternen4.5/5 (3)
- SolidWorks 2018 Learn by doing - Part 2: Surface Design, Mold Tools, WeldmentsVon EverandSolidWorks 2018 Learn by doing - Part 2: Surface Design, Mold Tools, WeldmentsBewertung: 2 von 5 Sternen2/5 (1)
- Expert Advisor Programming for BeginnersVon EverandExpert Advisor Programming for BeginnersBewertung: 4.5 von 5 Sternen4.5/5 (4)
- Cylindrical Type BR SeriesDokument6 SeitenCylindrical Type BR SeriesPeru HayaNoch keine Bewertungen
- Readme eDokument3 SeitenReadme eJosé Antonio Velásquez CostaNoch keine Bewertungen
- Teach Pendant Manual ER4u PDFDokument19 SeitenTeach Pendant Manual ER4u PDFnamnp2007Noch keine Bewertungen
- Scorbot Er4u User ManualDokument41 SeitenScorbot Er4u User Manualdaniel2442Noch keine Bewertungen
- PLC ApplicationDokument56 SeitenPLC ApplicationMohamed Gawad ARaya88% (8)
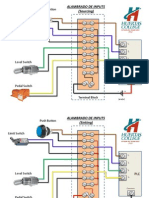
- Alambrado de Inputs OutputsDokument4 SeitenAlambrado de Inputs OutputsIñaki EseberriNoch keine Bewertungen
- Lab Volt Trainer Allen Bradley Micologix 1200 Rslogix 500 Screen FotoDokument2 SeitenLab Volt Trainer Allen Bradley Micologix 1200 Rslogix 500 Screen FotoPeru HayaNoch keine Bewertungen
- Flagword 5 of CPU Address 58: 3555 Flagword 5 Is To Be Modified 3555Dokument1 SeiteFlagword 5 of CPU Address 58: 3555 Flagword 5 Is To Be Modified 3555Peru HayaNoch keine Bewertungen
- InstallDokument1 SeiteInstallRaúl Leonel Castañeda AguilarNoch keine Bewertungen
- Program CreditsDokument1 SeiteProgram CreditsPeru HayaNoch keine Bewertungen
- Teach PendDokument1 SeiteTeach PendPeru HayaNoch keine Bewertungen
- Teach Pendant Manual ER4u PDFDokument19 SeitenTeach Pendant Manual ER4u PDFnamnp2007Noch keine Bewertungen
- InstallDokument1 SeiteInstallRaúl Leonel Castañeda AguilarNoch keine Bewertungen
- Experiment 1 Robocell & Scorbase: 1.objectiveDokument9 SeitenExperiment 1 Robocell & Scorbase: 1.objectivePeru HayaNoch keine Bewertungen
- Scorbot TutorialDokument9 SeitenScorbot TutorialPeru HayaNoch keine Bewertungen
- Teach Pendant Manual ER4u PDFDokument19 SeitenTeach Pendant Manual ER4u PDFnamnp2007Noch keine Bewertungen
- ACLmanual (English)Dokument203 SeitenACLmanual (English)Peru HayaNoch keine Bewertungen
- 100343-b ER - 4u - 1Dokument45 Seiten100343-b ER - 4u - 1Peru HayaNoch keine Bewertungen
- ACLmanual (English)Dokument203 SeitenACLmanual (English)Peru HayaNoch keine Bewertungen
- Readme eDokument3 SeitenReadme eJosé Antonio Velásquez CostaNoch keine Bewertungen
- Automatic Control ExercisesDokument183 SeitenAutomatic Control ExercisesFrancesco Vasturzo100% (1)
- CHAPTER 2 - ALGEBRA (Latest)Dokument41 SeitenCHAPTER 2 - ALGEBRA (Latest)FirdausNoch keine Bewertungen
- Module 1 Inclusive Education Lecture 1 & Introduction - OnlineDokument32 SeitenModule 1 Inclusive Education Lecture 1 & Introduction - OnlineSharon ShenNoch keine Bewertungen
- Engine Torque Settings and Spec's 3.0L V6 SCDokument4 SeitenEngine Torque Settings and Spec's 3.0L V6 SCMario MaravillaNoch keine Bewertungen
- Hilfswerk Wien-Salzburg - 11. Meio 2018Dokument9 SeitenHilfswerk Wien-Salzburg - 11. Meio 2018FreieEnergieNoch keine Bewertungen
- Wakit, Nico P.Dokument5 SeitenWakit, Nico P.yeng botzNoch keine Bewertungen
- ENGLISH TOEFL Structure (3rd Exercise)Dokument5 SeitenENGLISH TOEFL Structure (3rd Exercise)susannnnnnNoch keine Bewertungen
- Pradeep Kshetrapal - Genius Physics (Class 12) - For IIT-JEE and CBSE 2 - Libgen - LiDokument338 SeitenPradeep Kshetrapal - Genius Physics (Class 12) - For IIT-JEE and CBSE 2 - Libgen - Lisujan subediNoch keine Bewertungen
- Is There Any Way To Download The Whole Package of Asphalt 8 Airborne So That I Can Install It On Any Android Device Without An Internet Connection - QuoraDokument4 SeitenIs There Any Way To Download The Whole Package of Asphalt 8 Airborne So That I Can Install It On Any Android Device Without An Internet Connection - QuoraMounir2105Noch keine Bewertungen
- ASME Geometric Dimension Ing and Tolerance Professional CertificationDokument20 SeitenASME Geometric Dimension Ing and Tolerance Professional CertificationPaul Anthony Red60% (5)
- Addressing Diversity Through The Years Special and Inclusive EducationDokument6 SeitenAddressing Diversity Through The Years Special and Inclusive EducationJiezel SurinNoch keine Bewertungen
- Functional Materials For Sustainable Energy TechnologiesDokument15 SeitenFunctional Materials For Sustainable Energy TechnologiesChristhy Vanessa Ruiz MadroñeroNoch keine Bewertungen
- VSR Trans. PPT3Dokument16 SeitenVSR Trans. PPT3VSR TRANSNoch keine Bewertungen
- Response 2000 IntroductionDokument24 SeitenResponse 2000 IntroductionRory Cristian Cordero RojoNoch keine Bewertungen
- One Wavelength To Loop SkywireDokument2 SeitenOne Wavelength To Loop SkywireRobert TurnerNoch keine Bewertungen
- FMS 427 BusinessPolicy1Dokument279 SeitenFMS 427 BusinessPolicy1Adeniyi Adedolapo OLanrewajuNoch keine Bewertungen
- 141 ISACA NACACS Auditing IT Projects Audit ProgramDokument86 Seiten141 ISACA NACACS Auditing IT Projects Audit Programkautaliya100% (6)
- Steam TableDokument3 SeitenSteam TableMUHAMAD SAUKINoch keine Bewertungen
- THE REFUND - Frigyes Karinthy: AuthorDokument6 SeitenTHE REFUND - Frigyes Karinthy: AuthorMilind JamnekarNoch keine Bewertungen
- Exposure: The PhotoreactionDokument16 SeitenExposure: The PhotoreactionGeetha ThiruvengadamNoch keine Bewertungen
- Ground Architecture (Mourad Medhat)Dokument146 SeitenGround Architecture (Mourad Medhat)Aída SousaNoch keine Bewertungen
- Researchpaper Should Removable Media Be Encrypted - PDF - ReportDokument15 SeitenResearchpaper Should Removable Media Be Encrypted - PDF - ReportSakshi Dhananjay KambleNoch keine Bewertungen
- Rexroth Hd2 ControlairDokument15 SeitenRexroth Hd2 ControlairRafaelNoch keine Bewertungen
- KV Class 3 Half Yearly Previous Year Question Paper 2019 ComputerDokument2 SeitenKV Class 3 Half Yearly Previous Year Question Paper 2019 Computer02 Aanya Gupta VII CNoch keine Bewertungen
- Lubricants - McMaster-CarrDokument8 SeitenLubricants - McMaster-CarrjeanyoperNoch keine Bewertungen
- TCS3400 DS000411 4-00Dokument34 SeitenTCS3400 DS000411 4-00Miguel_Angel92Noch keine Bewertungen
- Review. Applications of Ecogeography and Geographic Information Systems in Conservation and Utilization of Plant Genetic ResourcesDokument11 SeitenReview. Applications of Ecogeography and Geographic Information Systems in Conservation and Utilization of Plant Genetic ResourcesEmilio Patané SpataroNoch keine Bewertungen
- John Hopkins Evidence Table - Systematic ReviewDokument2 SeitenJohn Hopkins Evidence Table - Systematic Reviewsandy ThylsNoch keine Bewertungen
- LogDokument67 SeitenLogRudhi Al GhaisanNoch keine Bewertungen
- Fire Alarm SymbolsDokument6 SeitenFire Alarm Symbolscarlos vasquezNoch keine Bewertungen