Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Aerodynamics II - Lecture NotesDokument17 SeitenAerodynamics II - Lecture NotestherealslimNoch keine Bewertungen
- Positive Displacement Pumps (Handout)Dokument3 SeitenPositive Displacement Pumps (Handout)Kim GinesNoch keine Bewertungen
- Hess SmithDokument26 SeitenHess SmithhakimkaskusNoch keine Bewertungen
- Analysis of WCSPH Laminar Viscosity Models:, IncludingDokument26 SeitenAnalysis of WCSPH Laminar Viscosity Models:, IncludingManuel AyalaNoch keine Bewertungen
- PIM300 Piping System Design PDFDokument66 SeitenPIM300 Piping System Design PDFmika cabelloNoch keine Bewertungen
- Design and Fabrication of Solar Powered Unmanned Aerial VehicleDokument64 SeitenDesign and Fabrication of Solar Powered Unmanned Aerial VehicleImtiazAliShaukatNoch keine Bewertungen
- Contents Auction Qfpira0198ht Qfpira019bj2 !qfpira019blglot Details For 435ch-1007tvDokument3 SeitenContents Auction Qfpira0198ht Qfpira019bj2 !qfpira019blglot Details For 435ch-1007tvharryNoch keine Bewertungen
- Aerodynamics of Airfoil & WingsDokument38 SeitenAerodynamics of Airfoil & WingsaerochirishNoch keine Bewertungen
- Atomization Challenges for Complex Fluids in Spray DryingDokument6 SeitenAtomization Challenges for Complex Fluids in Spray DryingNicolas Pardo AlvarezNoch keine Bewertungen
- Negash 1Dokument5 SeitenNegash 1abuabe51Noch keine Bewertungen
- ANALYSIS OF WAY BESAI RIVER FLOODING WITH MATHEMATICAL MODELINGDokument16 SeitenANALYSIS OF WAY BESAI RIVER FLOODING WITH MATHEMATICAL MODELINGsugendengalNoch keine Bewertungen
- AA - End Sem Question BankDokument8 SeitenAA - End Sem Question BankPilot UtsavNoch keine Bewertungen
- Steam Trap - Wikipedia, The Free EncyclopediaDokument2 SeitenSteam Trap - Wikipedia, The Free EncyclopediaAnbu Ayyappan100% (1)
- Tractor d8 TDokument2 SeitenTractor d8 TAkira TamashiroNoch keine Bewertungen
- Fluid Mechanics: Learner's Module 2 (Module 2A, 2B, 2C & 2D) Bsed Science 1GDokument8 SeitenFluid Mechanics: Learner's Module 2 (Module 2A, 2B, 2C & 2D) Bsed Science 1GCarlo Jay BasulNoch keine Bewertungen
- Sonic Nozzle DesignDokument86 SeitenSonic Nozzle Designsb ali100% (1)
- Tim1 KelasADokument5 SeitenTim1 KelasARiatus SNoch keine Bewertungen
- Pump Maintenance EssentialsDokument29 SeitenPump Maintenance EssentialsnaushadmnnitNoch keine Bewertungen
- SedimentationDokument5 SeitenSedimentationAduchelab AdamsonuniversityNoch keine Bewertungen
- Abu PembahasanDokument55 SeitenAbu PembahasanshasaNoch keine Bewertungen
- Exp6 Air Flow Velocity and Pressure Coefficient Around The 90o Rectangular DuctDokument7 SeitenExp6 Air Flow Velocity and Pressure Coefficient Around The 90o Rectangular DuctKawar Abid100% (1)
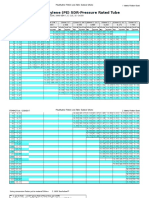
- Polyethylene friction loss chartDokument18 SeitenPolyethylene friction loss chartprasadnn2001Noch keine Bewertungen
- Vapor Pockets Formation & Column Separation: Design of Pipelines and Pumping Stations (IHD-443)Dokument19 SeitenVapor Pockets Formation & Column Separation: Design of Pipelines and Pumping Stations (IHD-443)mohamed ahmedNoch keine Bewertungen
- Chapter Summary and Study Guide for Control Volume Analysis Using EnergyDokument24 SeitenChapter Summary and Study Guide for Control Volume Analysis Using Energykrntomboy25% (4)
- Gujarat Technological University: W.E.F. AY 2018-19Dokument3 SeitenGujarat Technological University: W.E.F. AY 2018-19SURAJ NAKUMNoch keine Bewertungen
- FLUENT-Intro 14.0 WS07b Vortex SheddingDokument39 SeitenFLUENT-Intro 14.0 WS07b Vortex Sheddingyoners1691Noch keine Bewertungen
- Laminar and Turbulent FlowDokument305 SeitenLaminar and Turbulent Flowjochem_ligthartNoch keine Bewertungen
- Appendix-5: Design of UndersluiceDokument8 SeitenAppendix-5: Design of UndersluicekkgbkjNoch keine Bewertungen
- Experiment 13 Open Channel FlowDokument16 SeitenExperiment 13 Open Channel FlowBam BinoNoch keine Bewertungen
- Centrifugal PumpDokument20 SeitenCentrifugal PumpHENRYGALLEGOSNoch keine Bewertungen