Das könnte Ihnen auch gefallen
- Sistemas LinearesDokument30 SeitenSistemas LinearesMaria DuarteNoch keine Bewertungen
- Linsis PDFDokument10 SeitenLinsis PDFdhiegoNoch keine Bewertungen
- Sistemas Lineares FinalDokument29 SeitenSistemas Lineares FinalnicholasjpNoch keine Bewertungen
- TeoremaRF e SistLinDokument9 SeitenTeoremaRF e SistLinGabriel Mendes MedeirosNoch keine Bewertungen
- Frações ParciaisDokument24 SeitenFrações Parciaisrosalina2Noch keine Bewertungen
- Lista 3 - Calculo NumericoDokument5 SeitenLista 3 - Calculo NumericoDiego santiago de lima0% (1)
- Apostila CAL NUMDokument18 SeitenApostila CAL NUMRodrigo CunhaNoch keine Bewertungen
- Sistemas LinearesDokument7 SeitenSistemas LinearesSamuel SilvaNoch keine Bewertungen
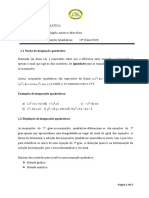
- 10@-Ficha-INEQUACOES QUADRATICAS-MatematicaDokument5 Seiten10@-Ficha-INEQUACOES QUADRATICAS-MatematicaAngelo Americo MarcelinoNoch keine Bewertungen
- Resumo de Matemática BásicaDokument14 SeitenResumo de Matemática BásicaUbirajara da S Santos75% (12)
- 1912 DDokument61 Seiten1912 Ddietaatkins2Noch keine Bewertungen
- Exercicios Matrizes Determinantes Sistemas Lineares ResolvidosDokument0 SeitenExercicios Matrizes Determinantes Sistemas Lineares ResolvidospangIoss100% (1)
- CN Revisao2Dokument4 SeitenCN Revisao2DenilsonNoch keine Bewertungen
- 5-CN Material 03 SistemaslinearesDokument27 Seiten5-CN Material 03 SistemaslinearesRodolfo Oliveira de SouzaNoch keine Bewertungen
- Sistemas Lineares Final-1Dokument25 SeitenSistemas Lineares Final-1joão_camilo_11Noch keine Bewertungen
- Dicas Completas Eear PDFDokument65 SeitenDicas Completas Eear PDFWellington Silva75% (4)
- Determinantes v1 5 PDFDokument6 SeitenDeterminantes v1 5 PDFmarcosboaNoch keine Bewertungen
- Norma de Vetores e MatrizesDokument57 SeitenNorma de Vetores e MatrizesEster Ferreira DiasNoch keine Bewertungen
- Gabarito Prova2 Sexta NoturnoDokument8 SeitenGabarito Prova2 Sexta NoturnoElelelNoch keine Bewertungen
- Lista 04Dokument5 SeitenLista 04__fabricioNoch keine Bewertungen
- 6 - Integral Por Frações Parciais - 20130510203351Dokument4 Seiten6 - Integral Por Frações Parciais - 20130510203351Silas GualbertoNoch keine Bewertungen
- Matrizes e Sistemas LinearesDokument14 SeitenMatrizes e Sistemas LinearesRicardo MarlusNoch keine Bewertungen
- 135 - 1528509 - Subst Trigonometricas - ITA-IME PDFDokument2 Seiten135 - 1528509 - Subst Trigonometricas - ITA-IME PDFGeovanna HollandaNoch keine Bewertungen
- Atividade 7 - 8º Ano - MAT - Equações Do 1º Grau - Sistemas Com Duas Equações e Duas IncógnitasDokument4 SeitenAtividade 7 - 8º Ano - MAT - Equações Do 1º Grau - Sistemas Com Duas Equações e Duas IncógnitasManuella MarianoNoch keine Bewertungen
- EquadiofantinasDokument11 SeitenEquadiofantinasapi-3799370100% (1)
- Aula02 Fatoração LUDokument27 SeitenAula02 Fatoração LUGersica CristineNoch keine Bewertungen
- Manual - MN - 2015 - Cap V PDFDokument11 SeitenManual - MN - 2015 - Cap V PDFabednegoNoch keine Bewertungen
- Aula A Aula AlgeLinDokument323 SeitenAula A Aula AlgeLinFabrício Trindade FigueredoNoch keine Bewertungen
- Apostila Álgebra Linear ComputacionalDokument55 SeitenApostila Álgebra Linear ComputacionalkatyzeniNoch keine Bewertungen
- Projeto 3 - Rafael Thomé FinalDokument21 SeitenProjeto 3 - Rafael Thomé FinalRAFAEL THOME LEITENoch keine Bewertungen
- Gab List Seg Matriz Sis DanteDokument9 SeitenGab List Seg Matriz Sis DanteDébora FreitasNoch keine Bewertungen
- Resumo Calculo NumericoDokument5 SeitenResumo Calculo NumericoGabriela SantosNoch keine Bewertungen
- Apostila Algebra Linear Computacional PDFDokument55 SeitenApostila Algebra Linear Computacional PDFVanessa BorgesNoch keine Bewertungen
- 2 Sistema LinearesDokument59 Seiten2 Sistema LinearesRaul GabrielNoch keine Bewertungen
- Aula 01 - Álgebra Linear - Sistemas Lineares - 2023 - AtualDokument22 SeitenAula 01 - Álgebra Linear - Sistemas Lineares - 2023 - AtualKerly Monroe PontesNoch keine Bewertungen
- Exercicios PED 2018 0Dokument11 SeitenExercicios PED 2018 0Zygmund BaumanNoch keine Bewertungen
- Programação LinearDokument19 SeitenProgramação LinearMatheus LimaNoch keine Bewertungen
- Sequência 4Dokument2 SeitenSequência 4Gilmara e Lauro SantosNoch keine Bewertungen
- Resumo Trigonometria BasicoDokument7 SeitenResumo Trigonometria BasicoMarcos EspelletNoch keine Bewertungen
- Aula D HojeDokument3 SeitenAula D HojeJorge Pilal RodriguesNoch keine Bewertungen
- Apostila Algebra Linear (Estudar)Dokument25 SeitenApostila Algebra Linear (Estudar)Renan AmorimNoch keine Bewertungen
- Metodos NumericosDokument3 SeitenMetodos NumericosCristian Uchasara CasavilcaNoch keine Bewertungen
- Resolução - Lista - UFRJ - Limites e ContinuidadeDokument6 SeitenResolução - Lista - UFRJ - Limites e ContinuidadeTiago PimentaNoch keine Bewertungen
- Colégio Estadual José Rodrigues Naves: Diagonal Principal - Diagonal SecundáriaDokument2 SeitenColégio Estadual José Rodrigues Naves: Diagonal Principal - Diagonal Secundáriamahrodrigues455Noch keine Bewertungen
- 2.3. Proglinear3Dokument8 Seiten2.3. Proglinear3FranciscoLibeleNoch keine Bewertungen
- Matemática - Modulo 02Dokument72 SeitenMatemática - Modulo 02fabiowalan100% (1)
- Sistema LinearesDokument33 SeitenSistema LinearesDavidson Leandro Silva dos SantosNoch keine Bewertungen
- MA Unidade 4 Equação 2°Dokument4 SeitenMA Unidade 4 Equação 2°Carlos MirandaNoch keine Bewertungen
- Apostila de Equações ExponenciaisDokument7 SeitenApostila de Equações ExponenciaisRobson O Prett'uNoch keine Bewertungen
- Equações-e-Inequações-Algebricas e ExerciciosDokument13 SeitenEquações-e-Inequações-Algebricas e ExerciciosTiago Neves100% (1)
- Métodos para Solução de Sistemas LinearesDokument10 SeitenMétodos para Solução de Sistemas LinearesRobinson Kazy SomNoch keine Bewertungen
- Controle GeométricoDokument18 SeitenControle GeométricoRenan FigueiredoNoch keine Bewertungen
- Como Trabalhar Com o OpenGLDokument382 SeitenComo Trabalhar Com o OpenGLadilson9230Noch keine Bewertungen
- Paula Eschholz Ribeiro Brofman PDFDokument144 SeitenPaula Eschholz Ribeiro Brofman PDFfvg50Noch keine Bewertungen
- Aula 5 Circuitos Elétricos II - Circuitos Trifásicos EquilibradosDokument26 SeitenAula 5 Circuitos Elétricos II - Circuitos Trifásicos EquilibradosfelipebozoNoch keine Bewertungen
- Guia Definitivo Procentagem para ConcursosDokument17 SeitenGuia Definitivo Procentagem para ConcursosTatiana SantosNoch keine Bewertungen
- A Polissema 2009Dokument337 SeitenA Polissema 2009Jussara Rauen RibasNoch keine Bewertungen
- Asep1-2018 1Dokument83 SeitenAsep1-2018 1renatofcortes100% (1)
- PLANO DE ENSINO - Unicid (Semestre)Dokument2 SeitenPLANO DE ENSINO - Unicid (Semestre)Pedro HenriqueNoch keine Bewertungen
- Apostila capacidade-HCM2010Dokument36 SeitenApostila capacidade-HCM2010Filipe Souza de Jesus100% (1)
- Livro PDF - Estatistica e Probabilidade (Exercícios Resolvidos) - Prof MSC Uanderson RebulaDokument35 SeitenLivro PDF - Estatistica e Probabilidade (Exercícios Resolvidos) - Prof MSC Uanderson RebulaProf MSc Uanderson Rébula100% (1)
- Leitura de NumerosDokument20 SeitenLeitura de NumerosMaria De Fátima FerreiraNoch keine Bewertungen
- Bases de DadosDokument107 SeitenBases de Dadospccardoso@gmail.comNoch keine Bewertungen
- Cap 6 - Propriedades Termodinâmica de FluidosDokument59 SeitenCap 6 - Propriedades Termodinâmica de FluidosTallita Arielle100% (3)
- AP1 - Álgebra LinearDokument3 SeitenAP1 - Álgebra LinearThiago MedeirosNoch keine Bewertungen
- Emai 4 Ano Aluno Vol.2Dokument34 SeitenEmai 4 Ano Aluno Vol.2lareth100% (2)
- facuminasCONCEITOS DE ENSINO E A APRENDIZAGEM DA MATEMÁTICA INICIALDokument34 SeitenfacuminasCONCEITOS DE ENSINO E A APRENDIZAGEM DA MATEMÁTICA INICIALMarlon MaresNoch keine Bewertungen
- 2 Série MatematicaDokument2 Seiten2 Série MatematicaRegiane DiasNoch keine Bewertungen
- Atividade Discursiva de Matemática InstrumentalDokument4 SeitenAtividade Discursiva de Matemática InstrumentalLeandro SilvaNoch keine Bewertungen
- Trabalho - 8º Ano (4º Bimestre)Dokument2 SeitenTrabalho - 8º Ano (4º Bimestre)Guilherme Ribeiro SouzaNoch keine Bewertungen
- Capitulo 2 - Regressão Linear SimplesDokument45 SeitenCapitulo 2 - Regressão Linear SimplesandreiaNoch keine Bewertungen
- 1 - Exercicio - Conceitos Gerais - 2019.1Dokument2 Seiten1 - Exercicio - Conceitos Gerais - 2019.1Gedeon DelgadilloNoch keine Bewertungen
- Relatório Lei de Snell Lab IVDokument4 SeitenRelatório Lei de Snell Lab IVAugusto LimaNoch keine Bewertungen
- Teoria Da Escolha Racional. Fernando MeirelesDokument10 SeitenTeoria Da Escolha Racional. Fernando MeirelesRodrigo Ferreira100% (1)
- Aula05 FUNDACAO (Tensão Admissível Do Solo Fundacoess Diretas)Dokument54 SeitenAula05 FUNDACAO (Tensão Admissível Do Solo Fundacoess Diretas)camilaeng23Noch keine Bewertungen
- Tu Te Tornas Eternamente Responsável Por Aquilo Que CativasDokument3 SeitenTu Te Tornas Eternamente Responsável Por Aquilo Que CativasMarlene Pereira LimaNoch keine Bewertungen
- Filosofia e Educação - Confluências PDFDokument544 SeitenFilosofia e Educação - Confluências PDFMorhamed DiasNoch keine Bewertungen
- Indique de Forma Legível A Versão Da Questão AulaDokument4 SeitenIndique de Forma Legível A Versão Da Questão AulaMarta RibeiroNoch keine Bewertungen
- PsicomotricidadeDokument107 SeitenPsicomotricidademercury1946100% (2)
- Tabela - Numeros RacionaisDokument8 SeitenTabela - Numeros RacionaisSandra Pedra50% (2)
- Nomenclatura TipográficaDokument12 SeitenNomenclatura TipográficaAlexandre Mota100% (2)