Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Abrasive Blast Nozzle Catalog: Bringing Ceramic Technology To Industry Boride P Roduct SDokument46 SeitenAbrasive Blast Nozzle Catalog: Bringing Ceramic Technology To Industry Boride P Roduct SSamsu SamsNoch keine Bewertungen
- AutoCAD Mechanical 2015 Overview Brochure - A4Dokument4 SeitenAutoCAD Mechanical 2015 Overview Brochure - A4Raul ReynosoNoch keine Bewertungen
- Excel Gantt Chart Template: Enter Your Project Details HereDokument14 SeitenExcel Gantt Chart Template: Enter Your Project Details HereBarselaNoch keine Bewertungen
- Java10 PDFDokument137 SeitenJava10 PDFswarup sarkarNoch keine Bewertungen
- Design & Fabrication of a Cost-Effective Agricultural DroneDokument57 SeitenDesign & Fabrication of a Cost-Effective Agricultural DroneFatima Nasir R:29Noch keine Bewertungen
- Create an access point for non-RouterOS laptop clientsDokument8 SeitenCreate an access point for non-RouterOS laptop clientsGorgeus WaffleNoch keine Bewertungen
- InGaN Quad-Junction Solar Cell SimulationDokument113 SeitenInGaN Quad-Junction Solar Cell SimulationMamoona BashirNoch keine Bewertungen
- Anglais Technique 1Dokument1 SeiteAnglais Technique 1mn13hhNoch keine Bewertungen
- الانجليزية CopieDokument7 Seitenالانجليزية Copiemn13hhNoch keine Bewertungen
- Genie - Electrique 3mt19 3trim9Dokument17 SeitenGenie - Electrique 3mt19 3trim9mn13hhNoch keine Bewertungen
- Genie Electrique 3mt19 3trim9Dokument17 SeitenGenie Electrique 3mt19 3trim9mn13hhNoch keine Bewertungen
- قياساتDokument23 SeitenقياساتМохамед ДиибNoch keine Bewertungen
- 17 AllamDokument10 Seiten17 Allammn13hhNoch keine Bewertungen
- Silvaco Manual - 1 PDFDokument18 SeitenSilvaco Manual - 1 PDFmn13hhNoch keine Bewertungen
- KidfthDokument1 SeiteKidfthmn13hhNoch keine Bewertungen
- Ada 457716Dokument75 SeitenAda 457716mn13hhNoch keine Bewertungen
- Simulation Study of Blue Ingan Multiple Quantum Well Light-Emitting Diodes With Different Hole Injection LayersDokument5 SeitenSimulation Study of Blue Ingan Multiple Quantum Well Light-Emitting Diodes With Different Hole Injection Layersmn13hhNoch keine Bewertungen
- Comparative Study of Simulation - OAMDokument4 SeitenComparative Study of Simulation - OAMGabby GabrielNoch keine Bewertungen
- Heterojunction Organic Solar Cell in Sentaurus TCADDokument9 SeitenHeterojunction Organic Solar Cell in Sentaurus TCADmn13hhNoch keine Bewertungen
- Introduction to Silvaco ATLAS Simulation ToolDokument13 SeitenIntroduction to Silvaco ATLAS Simulation ToolRajesh AgarwalNoch keine Bewertungen
- Introduction to Silvaco ATLAS Simulation ToolDokument13 SeitenIntroduction to Silvaco ATLAS Simulation ToolRajesh AgarwalNoch keine Bewertungen
- Compo2 InfoDokument1 SeiteCompo2 Infomn13hhNoch keine Bewertungen
- Serial UART TransmitterDokument9 SeitenSerial UART Transmittermn13hhNoch keine Bewertungen
- مشارع الماجستير في الجامعت الجزائرية 2014 2015Dokument24 Seitenمشارع الماجستير في الجامعت الجزائرية 2014 2015عبد العزيز تقيةNoch keine Bewertungen
- Flow CodeDokument112 SeitenFlow Codereddylogin100% (1)
- مشارع الماجستير في الجامعت الجزائرية 2014 2015Dokument24 Seitenمشارع الماجستير في الجامعت الجزائرية 2014 2015عبد العزيز تقيةNoch keine Bewertungen
- Synplify UGDokument222 SeitenSynplify UGmn13hhNoch keine Bewertungen
- WebControls - TabStripDokument38 SeitenWebControls - TabStripProkopis PrNoch keine Bewertungen
- Ferrites and AccessoriesDokument11 SeitenFerrites and AccessoriesMaulik ShahNoch keine Bewertungen
- Login Form: User Name Password Remember MeDokument8 SeitenLogin Form: User Name Password Remember MeBridget Anne BenitezNoch keine Bewertungen
- Handout 06 - Geothermometry PDFDokument7 SeitenHandout 06 - Geothermometry PDFOg LocabaNoch keine Bewertungen
- Apex Ch10c1 Chassis At2408s Ch04t1002 Om8839ps Tda4605 TV SMDokument61 SeitenApex Ch10c1 Chassis At2408s Ch04t1002 Om8839ps Tda4605 TV SMAlejo Alex CondeNoch keine Bewertungen
- Proper Fluid Selection Maintenance For Heat Transfer TNTCFLUIDS PDFDokument12 SeitenProper Fluid Selection Maintenance For Heat Transfer TNTCFLUIDS PDFAnonymous bHh1L1Noch keine Bewertungen
- Massive MIMO For Communications With Drone SwarmsDokument26 SeitenMassive MIMO For Communications With Drone SwarmsAsher Suranjith JayakumarNoch keine Bewertungen
- Probability Statistics and Random Processes Third Edition T Veerarajan PDFDokument3 SeitenProbability Statistics and Random Processes Third Edition T Veerarajan PDFbhavyamNoch keine Bewertungen
- Sample Question Paper Provides Practice for Class 9 Science ExamDokument5 SeitenSample Question Paper Provides Practice for Class 9 Science ExamViswak BalajiNoch keine Bewertungen
- Solution of Homework 4Dokument4 SeitenSolution of Homework 4Kamalakar Reddy100% (2)
- TIM Fungsi 1Dokument40 SeitenTIM Fungsi 1lilikNoch keine Bewertungen
- Capsule Proposal TemplateDokument5 SeitenCapsule Proposal Templatematain elementary SchoolNoch keine Bewertungen
- Uncompacted Void Content of Fine Aggregate (As Influenced by Particle Shape, Surface Texture, and Grading)Dokument5 SeitenUncompacted Void Content of Fine Aggregate (As Influenced by Particle Shape, Surface Texture, and Grading)ROBERTO MIRANDANoch keine Bewertungen
- Ey-H3l Yh1576Dokument44 SeitenEy-H3l Yh1576jorgeNoch keine Bewertungen
- BetaDokument16 SeitenBetaAkshita Saxena100% (2)
- Design Plan: A Performance Task in GeometryDokument12 SeitenDesign Plan: A Performance Task in GeometryRobert Ryan SantiagoNoch keine Bewertungen
- Hydrocarbons NotesDokument15 SeitenHydrocarbons Notesarjunrkumar2024Noch keine Bewertungen
- Astm A6 A6m-08Dokument62 SeitenAstm A6 A6m-08Vũ Nhân HòaNoch keine Bewertungen
- MTech Information Security FINAL 10052018Dokument20 SeitenMTech Information Security FINAL 10052018sirisha vNoch keine Bewertungen
- Visualizing Interstellar WormholesDokument14 SeitenVisualizing Interstellar WormholesFranciscoNoch keine Bewertungen
- Pneumatic Tyres: CMR Engineering CollegeDokument17 SeitenPneumatic Tyres: CMR Engineering CollegeHemanth Rama Krishna YernagulaNoch keine Bewertungen
- Microstation V8I Accudraw Basics: Bentley Institute Course GuideDokument80 SeitenMicrostation V8I Accudraw Basics: Bentley Institute Course Guideh_eijy2743Noch keine Bewertungen
- Blowfish Encryption AlgorithmDokument3 SeitenBlowfish Encryption AlgorithmParkerAllisonNoch keine Bewertungen
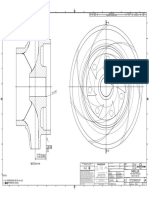
- Impeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLDokument1 SeiteImpeller: REV Rev by Description PCN / Ecn Date CHK'D A JMM Released For Production N/A 18/11/2019 PDLSenthilkumar RamalingamNoch keine Bewertungen