Das könnte Ihnen auch gefallen
- CHAPITRE 8 Machines SynchroneDokument6 SeitenCHAPITRE 8 Machines SynchroneHakim Dokmane100% (1)
- Machines A Courant AlternatifDokument4 SeitenMachines A Courant AlternatifMohamed Yacine RachediNoch keine Bewertungen
- 1.1 Le Moteur À Réluctance Variable PDFDokument18 Seiten1.1 Le Moteur À Réluctance Variable PDFmabialaNoch keine Bewertungen
- Les Machines AsynhronesDokument37 SeitenLes Machines AsynhronessnowleoNoch keine Bewertungen
- Sectionneur PDFDokument21 SeitenSectionneur PDFAyoub AyayNoch keine Bewertungen
- 09 Principe de Fonctionnement Machine AsynchroneDokument16 Seiten09 Principe de Fonctionnement Machine AsynchroneTaoufiqBaouchNoch keine Bewertungen
- TP Auto PercageDokument21 SeitenTP Auto PercagekaoutarNoch keine Bewertungen
- 5.cours MCCDokument27 Seiten5.cours MCCDadi AzizNoch keine Bewertungen
- Etude de L'impact de Démarrage Des Moteurs Électriques Sur La Qualité Du Réseau ÉlectriqueDokument110 SeitenEtude de L'impact de Démarrage Des Moteurs Électriques Sur La Qualité Du Réseau Électriquemomo sali100% (1)
- Moteurs LsDokument56 SeitenMoteurs LsYEKINI Abdul MadjidNoch keine Bewertungen
- Chap1-Sys Monophasé Et TriphaséDokument18 SeitenChap1-Sys Monophasé Et TriphasémahdiNoch keine Bewertungen
- Le Moteur Pas A Pas PDFDokument23 SeitenLe Moteur Pas A Pas PDFKhaled OuniNoch keine Bewertungen
- Note de Cours Commande de MachineDokument43 SeitenNote de Cours Commande de MachineBahriNoch keine Bewertungen
- Machine À Courant ContinuDokument6 SeitenMachine À Courant ContinuAli_Ghom_9843100% (1)
- Pole LisseDokument2 SeitenPole Lisseaissa bsbNoch keine Bewertungen
- tp2 Ci3 Doshydro PDFDokument12 Seitentp2 Ci3 Doshydro PDFÕůśśmãŞįmőNoch keine Bewertungen
- Cours Electromecanique Analyse de Circuits Electroniques de PuissanceDokument136 SeitenCours Electromecanique Analyse de Circuits Electroniques de PuissanceAlabi OlihideNoch keine Bewertungen
- Modélisation Du Moteur Synchrone À Aimant PermanentDokument16 SeitenModélisation Du Moteur Synchrone À Aimant PermanentHichem BourasNoch keine Bewertungen
- Demarrage Des Moteurs - V2k6Dokument28 SeitenDemarrage Des Moteurs - V2k6Jamel Riahi100% (1)
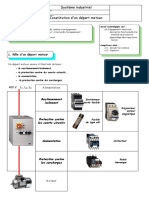
- Depart Moteur PDokument6 SeitenDepart Moteur PLaymen DibNoch keine Bewertungen
- Generalites Sur Le Transformateur PDFDokument7 SeitenGeneralites Sur Le Transformateur PDFAbdou Metidji100% (1)
- TD5 2021Dokument5 SeitenTD5 2021Abdou ElakNoch keine Bewertungen
- Cours ContacteurDokument7 SeitenCours ContacteurOussema ElloumiNoch keine Bewertungen
- Mini Projet Moteur AsynchroneDokument3 SeitenMini Projet Moteur AsynchronehamidaNoch keine Bewertungen
- Theoreme de FerarriDokument4 SeitenTheoreme de FerarriKamita Medias100% (1)
- Sujet Corrige-Moteur Asynchrone PDFDokument3 SeitenSujet Corrige-Moteur Asynchrone PDFAmine LôrênzoNoch keine Bewertungen
- Machine AsynchroneDokument5 SeitenMachine AsynchronemidoNoch keine Bewertungen
- Examen Variateurs 2 Juillet 2021Dokument16 SeitenExamen Variateurs 2 Juillet 2021Mo BaLaNoch keine Bewertungen
- Moteur Asynchrone Triphas1Dokument5 SeitenMoteur Asynchrone Triphas1i kNoch keine Bewertungen
- L'Électricité - Découvreurs et Inventeurs: Tome IVVon EverandL'Électricité - Découvreurs et Inventeurs: Tome IVBewertung: 3 von 5 Sternen3/5 (2)
- Demarrage Des Moteurs Prof V 2k6Dokument16 SeitenDemarrage Des Moteurs Prof V 2k6havoc2012100% (1)
- Machine Asynchrone TriphaséeDokument26 SeitenMachine Asynchrone TriphaséekeylogNoch keine Bewertungen
- Crrection ExamenDokument7 SeitenCrrection ExamenHØu ÇîNeNoch keine Bewertungen
- Demmarage Et Freinage Des Moteurs AsynchroneDokument6 SeitenDemmarage Et Freinage Des Moteurs AsynchroneerzrzretgertfertgeNoch keine Bewertungen
- Transformateur TriphaseDokument16 SeitenTransformateur TriphaseAlain Tsemogne Sado100% (2)
- Machine Synchrone Cours TGMDokument6 SeitenMachine Synchrone Cours TGMSaid Mamou100% (3)
- TPDokument12 SeitenTPAhmed AttaouiNoch keine Bewertungen
- Exercices Corrigés Moteur Synchrone - Cours TechProDokument4 SeitenExercices Corrigés Moteur Synchrone - Cours TechProImane ZahiriNoch keine Bewertungen
- TD Modelisation MCCDokument6 SeitenTD Modelisation MCCcours importantNoch keine Bewertungen
- Ch3 Régime SinusoïdalDokument23 SeitenCh3 Régime SinusoïdalHamza NajarNoch keine Bewertungen
- Machine À Courant Continu I PDFDokument60 SeitenMachine À Courant Continu I PDFhafidNoch keine Bewertungen
- Machine Synchrone: I. DescriptionDokument1 SeiteMachine Synchrone: I. DescriptionKawther BenNoch keine Bewertungen
- Chapitre 2 Circuits Electriques Et Ses ComposantsDokument54 SeitenChapitre 2 Circuits Electriques Et Ses ComposantsElhadji Mayacine NguiraneNoch keine Bewertungen
- Transformateur TriphaséDokument8 SeitenTransformateur TriphaséHamdiNoch keine Bewertungen
- CONVEMAG - Machines AsynchronesDokument25 SeitenCONVEMAG - Machines AsynchronesMehdi Mansouri100% (1)
- Cours Electronique PuissanceDokument50 SeitenCours Electronique PuissanceAmine DaoudiNoch keine Bewertungen
- Pas A Pas PDFDokument20 SeitenPas A Pas PDFBentchikou MohNoch keine Bewertungen
- Moteur À Courant Continu 2016Dokument12 SeitenMoteur À Courant Continu 2016basmaNoch keine Bewertungen
- 0 - Moteur Asynchrone A Cage Final - Docx Li ELM-1Dokument15 Seiten0 - Moteur Asynchrone A Cage Final - Docx Li ELM-1Salim BelkhirNoch keine Bewertungen
- Machine Asynchrone Du Schema Equivalent FinaleDokument11 SeitenMachine Asynchrone Du Schema Equivalent FinaleOtman StariNoch keine Bewertungen
- TP BobinageDokument3 SeitenTP BobinageYazid AbouchihabeddineNoch keine Bewertungen
- Cours Machines AsynchronesDokument53 SeitenCours Machines Asynchronesminoungou constantNoch keine Bewertungen
- MAS Cours CompletDokument39 SeitenMAS Cours Completطنين نسنسNoch keine Bewertungen
- 6 Exercices Le Transformateur Triphase 2 Bac Science Dingenieur PDFDokument5 Seiten6 Exercices Le Transformateur Triphase 2 Bac Science Dingenieur PDFNarutoNoch keine Bewertungen
- Les Enroulements À Une CoucheDokument8 SeitenLes Enroulements À Une Couchefayssal22Noch keine Bewertungen
- Cours Machine AsynchroneDokument28 SeitenCours Machine AsynchroneMeryem El MennaouyNoch keine Bewertungen
- Chapitre 4 Transformateur Monophasé TriphaséDokument11 SeitenChapitre 4 Transformateur Monophasé TriphaséMohamed Yacine Rachedi100% (2)
- Tp3 Etude Montages Redresseurs CommandesDokument5 SeitenTp3 Etude Montages Redresseurs CommandesDjalal Eddine HammachiNoch keine Bewertungen
- Le système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoVon EverandLe système d'approvisionnement en terres dans les villes d'Afrique de l'Ouest: L’exemple de BamakoNoch keine Bewertungen
- AdetsDokument8 SeitenAdetsAllNightLong77Noch keine Bewertungen
- Maçonerie Revetements MurauxDokument8 SeitenMaçonerie Revetements MurauxMouhsineAtb100% (1)
- Cours Mécanique - Fatigue Des MatériauxDokument107 SeitenCours Mécanique - Fatigue Des Matériauxengineer1940Noch keine Bewertungen
- ParasismiqueDokument82 SeitenParasismiqueMouhsineAtbNoch keine Bewertungen
- Structures Élastiques Composées de Poutres PDFDokument24 SeitenStructures Élastiques Composées de Poutres PDFMouhsineAtb100% (1)
- RdmtheoDokument61 SeitenRdmtheoMouhsineAtb100% (1)
- Efforts Intérieurs PDFDokument15 SeitenEfforts Intérieurs PDFMouhsineAtbNoch keine Bewertungen
- Machines Asynchrones - Choix Et Problèmes ConnexesDokument27 SeitenMachines Asynchrones - Choix Et Problèmes ConnexesMouhsineAtb50% (2)
- RDM MMCDokument57 SeitenRDM MMCMouhsineAtb100% (1)
- RDM Théorie Des PoutresDokument30 SeitenRDM Théorie Des PoutresMouhsineAtb100% (2)
- 05 Exercices PDFDokument5 Seiten05 Exercices PDFNunoNoch keine Bewertungen
- Machines ÉlectrostatiquesDokument26 SeitenMachines ÉlectrostatiquesMouhsineAtb100% (6)
- Mathieu Le Nel 33359 Kergourlay Le-Nel Pince-Hgw Notice-CalculDokument15 SeitenMathieu Le Nel 33359 Kergourlay Le-Nel Pince-Hgw Notice-CalculMouhsineAtbNoch keine Bewertungen
- Rehabilitation InstallationsDokument81 SeitenRehabilitation InstallationsMouhsineAtb100% (1)
- Chapitre Transformateur MonophaseDokument14 SeitenChapitre Transformateur MonophaseImen SaidiNoch keine Bewertungen
- Systèmes Ongrid Pour Les Industriels Raccordés en Moyenne Tension - 2Dokument111 SeitenSystèmes Ongrid Pour Les Industriels Raccordés en Moyenne Tension - 2nabil basbousNoch keine Bewertungen
- Machine À Reluctance VariableDokument21 SeitenMachine À Reluctance Variablesoraya ssouNoch keine Bewertungen
- Base de CalculDokument4 SeitenBase de CalculTafita HeritianaNoch keine Bewertungen
- BE AlimDokument36 SeitenBE AlimMoez HannachiNoch keine Bewertungen
- L3 EltDokument1 SeiteL3 EltAbdou ElakNoch keine Bewertungen
- Photoelectricite PDFDokument4 SeitenPhotoelectricite PDFRima NoraNoch keine Bewertungen
- Chapitre 2Dokument6 SeitenChapitre 2Divin SEÏDOU100% (1)
- En Cas de Problème D'images - Technique de Réparation TVDokument1 SeiteEn Cas de Problème D'images - Technique de Réparation TVArmand EssNoch keine Bewertungen
- TD N°02 Elec1 - 221016 - 155204Dokument6 SeitenTD N°02 Elec1 - 221016 - 155204Rayen MlaouhiaNoch keine Bewertungen
- HYDRAULIQUE DistributeursDokument9 SeitenHYDRAULIQUE DistributeursACHRAFNoch keine Bewertungen
- Memoire JulianoDokument105 SeitenMemoire JulianoHarold AMADJI100% (1)
- Examens Et CC 2013 2014 2015Dokument20 SeitenExamens Et CC 2013 2014 2015HakimAgüeroNoch keine Bewertungen
- ThevninDokument69 SeitenThevninAbdel Ilah El AzzabNoch keine Bewertungen
- coursELP-Av A.DendougaDokument43 SeitencoursELP-Av A.DendougaMohamed Amine FakhfakhNoch keine Bewertungen
- Fiches de Revision MPSIDokument169 SeitenFiches de Revision MPSIJeanaime360Noch keine Bewertungen
- Activite n-3 PermutateurDokument5 SeitenActivite n-3 PermutateurKANTE SOUMNoch keine Bewertungen
- Bac Blanc N4 BiofDokument9 SeitenBac Blanc N4 BiofAnas TalhiNoch keine Bewertungen
- CemDokument36 SeitenCemHakunaMatataNoch keine Bewertungen
- Devoir Maison: Les Lois de L'électricitéDokument2 SeitenDevoir Maison: Les Lois de L'électriciténassermk117Noch keine Bewertungen
- Mémoire de Fin D'étude PDFDokument77 SeitenMémoire de Fin D'étude PDFAbdollah El AissiNoch keine Bewertungen
- Les Régulateurs de TensionDokument3 SeitenLes Régulateurs de TensionMage84Noch keine Bewertungen
- 1 - Antennes CompactesDokument45 Seiten1 - Antennes Compactesbomar_89Noch keine Bewertungen
- Manuel TP ELN L2 ST S4 ElectriciteDokument65 SeitenManuel TP ELN L2 ST S4 ElectriciteYassine KurokochiNoch keine Bewertungen
- Chapitre IIDokument24 SeitenChapitre IIYasmine HammamiNoch keine Bewertungen
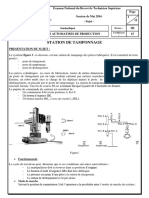
- Sap - 2016 - Sujet BTSDokument15 SeitenSap - 2016 - Sujet BTSagvv6886Noch keine Bewertungen
- BUP Ferrofluide PartieA Finale V4Dokument9 SeitenBUP Ferrofluide PartieA Finale V4agabuskasepaNoch keine Bewertungen
- Sans TitreDokument7 SeitenSans Titreqh7ps6r4b8Noch keine Bewertungen
- Exam Capt Eurs 2018Dokument5 SeitenExam Capt Eurs 2018Michel AchkarNoch keine Bewertungen
- NFM87 202Dokument3 SeitenNFM87 202Brahim JEBRINoch keine Bewertungen