Das könnte Ihnen auch gefallen
- Controls Lab 2Dokument10 SeitenControls Lab 2VIKAS JAATNoch keine Bewertungen
- Obstacle Avoiding RobotDokument17 SeitenObstacle Avoiding RobotNishant Kamal93% (15)
- Obstacle Avoiding RobotDokument17 SeitenObstacle Avoiding Robotukavnganesh2002Noch keine Bewertungen
- Obstacle Avoiding RobotDokument18 SeitenObstacle Avoiding RobotAJIN KNoch keine Bewertungen
- Taxi Fare MeterDokument6 SeitenTaxi Fare MeterJawad malik0% (2)
- Engr2105 Lab3Dokument8 SeitenEngr2105 Lab3SUPER AMAZINGNoch keine Bewertungen
- IR Sensor Infrared Obstacle Sensor Module Has Builtin IR Transmitter and IR Receiver That Sends Out IR Energy and Looks ForDokument12 SeitenIR Sensor Infrared Obstacle Sensor Module Has Builtin IR Transmitter and IR Receiver That Sends Out IR Energy and Looks ForRavi RajanNoch keine Bewertungen
- Obstacle Avoiding RobotDokument17 SeitenObstacle Avoiding RobotSmiley Boy Aanand100% (1)
- Report FinaleDokument16 SeitenReport Finalewtpqk87nxcNoch keine Bewertungen
- ReportDokument11 SeitenReportAkash GolwalkarNoch keine Bewertungen
- ReportDokument11 SeitenReportAkash GolwalkarNoch keine Bewertungen
- The Ultrasonic SensorDokument14 SeitenThe Ultrasonic SensorAdalberto Sharpley100% (1)
- Ir Proximity Sensor: Purpose & Overview of This ProjectDokument11 SeitenIr Proximity Sensor: Purpose & Overview of This ProjectKirti GuptaNoch keine Bewertungen
- From Mech: Jump ToDokument16 SeitenFrom Mech: Jump ToMohammed Abu SufianNoch keine Bewertungen
- Obstacle Robot ModuleDokument10 SeitenObstacle Robot ModuleSir MannyNoch keine Bewertungen
- Cep Micro2 170857Dokument13 SeitenCep Micro2 170857Ramsha MalikNoch keine Bewertungen
- LilyBot Obstacle Avoidance Using 4 HC SR04 Sonar SDokument13 SeitenLilyBot Obstacle Avoidance Using 4 HC SR04 Sonar SFranco PalumboNoch keine Bewertungen
- PIC18 Pulse Width ModulationDokument16 SeitenPIC18 Pulse Width ModulationAnoj Pahathkumbura100% (1)
- Project Report: TitleDokument9 SeitenProject Report: TitlejboluwadeNoch keine Bewertungen
- Crankshaft Sensor CodeDokument28 SeitenCrankshaft Sensor Codejvazquez50160% (5)
- Sony Sirc ProtocolDokument10 SeitenSony Sirc ProtocolFrancisco HernandezNoch keine Bewertungen
- Robot Semovente Line FollowingDokument6 SeitenRobot Semovente Line FollowingGiacomo RealeNoch keine Bewertungen
- Project ReportDokument17 SeitenProject ReportDhruv KapadiaNoch keine Bewertungen
- Group 7 FinalReportDokument27 SeitenGroup 7 FinalReportJust4 Shop100% (1)
- How To Program An Arduino Based Metal DetectorDokument18 SeitenHow To Program An Arduino Based Metal DetectorSarah HadjadjNoch keine Bewertungen
- 01 EncoderDokument4 Seiten01 EncoderAngel ChicchonNoch keine Bewertungen
- Obstacle Avoiding Robot ReportDokument10 SeitenObstacle Avoiding Robot ReportMuneeb0% (1)
- My Arduino Line Following Robot !!! - With Pololu QTR-6A IR Reflectance Sensor ArrayDokument4 SeitenMy Arduino Line Following Robot !!! - With Pololu QTR-6A IR Reflectance Sensor ArraySadiq AhmadNoch keine Bewertungen
- Floor Cleaning RobotDokument13 SeitenFloor Cleaning RobotPrajjwal NegiNoch keine Bewertungen
- ARM Embedded Controller ManualDokument28 SeitenARM Embedded Controller ManualGagan NaiduNoch keine Bewertungen
- Tassaduq 46Dokument5 SeitenTassaduq 46Xyed Haider BukhariNoch keine Bewertungen
- Automatic Navigating VehicleDokument16 SeitenAutomatic Navigating VehicleNarvasa, YsavelleNoch keine Bewertungen
- Ramakrishna Mission Shilpamandira: IR Remote Mains SwitchingDokument29 SeitenRamakrishna Mission Shilpamandira: IR Remote Mains SwitchingDebabrata AdakNoch keine Bewertungen
- Real Time Digital Clock ReportDokument14 SeitenReal Time Digital Clock ReportNoor AhmedNoch keine Bewertungen
- RPMDokument18 SeitenRPMCarlos Alberto Venancio PerezNoch keine Bewertungen
- A Packrat GPS Receiver ProjectDokument31 SeitenA Packrat GPS Receiver ProjectPJF100% (1)
- Arduino Sumo Robot: Before We Start .Dokument8 SeitenArduino Sumo Robot: Before We Start .Gede WiawanNoch keine Bewertungen
- Practical 7 Time DelayDokument3 SeitenPractical 7 Time DelayHet PatelNoch keine Bewertungen
- Project 9 Solar Tracking SystemDokument3 SeitenProject 9 Solar Tracking System19UEC074 Kalvaria DarlongNoch keine Bewertungen
- Joe Project RobotDokument19 SeitenJoe Project RobotTiruveedula RishendraNoch keine Bewertungen
- Fill 2Dokument15 SeitenFill 2mostafa.ahmd.ramdanNoch keine Bewertungen
- Control Lab3 ReportDokument14 SeitenControl Lab3 ReportSai Susrush KadiyalaNoch keine Bewertungen
- Ap Manual/experiment No 4 GPSDokument6 SeitenAp Manual/experiment No 4 GPSDakshata WaghNoch keine Bewertungen
- Obstacle Avoiding Robot Using Arduino and Ultrasonic SensorDokument10 SeitenObstacle Avoiding Robot Using Arduino and Ultrasonic SensorDwi Pranomo100% (3)
- Hexapod Master Slave CommunicationDokument22 SeitenHexapod Master Slave CommunicationDigvijay MaheshwariNoch keine Bewertungen
- Elec 562Dokument6 SeitenElec 562MOHAMMEDNoch keine Bewertungen
- Unsa Jan (033!19!0048) Robotics Lab 2Dokument7 SeitenUnsa Jan (033!19!0048) Robotics Lab 2hande ercelNoch keine Bewertungen
- Propeller ClockDokument18 SeitenPropeller ClockDeepanshu Arora67% (6)
- PID+Line Follower CodeDokument8 SeitenPID+Line Follower Codeanju120485Noch keine Bewertungen
- Lab06 Sheet K02 Deb3013Dokument10 SeitenLab06 Sheet K02 Deb3013Suhaimi ShahabNoch keine Bewertungen
- Griet DSP ProgramsDokument14 SeitenGriet DSP ProgramsJaipaul CheernamNoch keine Bewertungen
- Bus Tracking SystemDokument19 SeitenBus Tracking SystemErole Technologies Pvt ltd Homemade EngineerNoch keine Bewertungen
- Digital Dice Using At89C51: A Report Submitt Ed To MSRIT Bangalore, For Partial Requirement of Award of Degree ofDokument21 SeitenDigital Dice Using At89C51: A Report Submitt Ed To MSRIT Bangalore, For Partial Requirement of Award of Degree ofHimica KhuranaNoch keine Bewertungen
- Digital Theromometer Using 8051Dokument17 SeitenDigital Theromometer Using 8051BALASUBRAMANIAN N BALASUBRAMANIAN NNoch keine Bewertungen
- Robot Pengantar Barang Otomatis Berbasis Mikrokontroler Avr Atmega16Dokument34 SeitenRobot Pengantar Barang Otomatis Berbasis Mikrokontroler Avr Atmega16therenkNoch keine Bewertungen
- Obstacle Avoiding Robot Using ArduinoDokument10 SeitenObstacle Avoiding Robot Using ArduinoSir MannyNoch keine Bewertungen
- Obstacle Avoiding Robot Using Ultrasonic SensorDokument10 SeitenObstacle Avoiding Robot Using Ultrasonic SensorANIL KUMAR CSTSERVICESNoch keine Bewertungen
- Project 1Dokument24 SeitenProject 1aeronautical rajasNoch keine Bewertungen
- Projects With Microcontrollers And PICCVon EverandProjects With Microcontrollers And PICCBewertung: 5 von 5 Sternen5/5 (1)
- Mcmaster-Carr Parts: Project Components Order Form MAE 3780 MechatronicsDokument12 SeitenMcmaster-Carr Parts: Project Components Order Form MAE 3780 MechatronicsFrancisco BennettNoch keine Bewertungen
- 5000 10000 15000 20000 25000 30000 35000 ObservedDokument5 Seiten5000 10000 15000 20000 25000 30000 35000 ObservedFrancisco BennettNoch keine Bewertungen
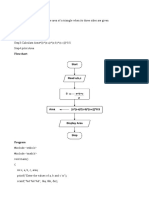
- Flow ChartDokument1 SeiteFlow ChartFrancisco BennettNoch keine Bewertungen
- Peer Review FormDokument1 SeitePeer Review FormFrancisco BennettNoch keine Bewertungen
- Lab 3 Part 2Dokument1 SeiteLab 3 Part 2Francisco BennettNoch keine Bewertungen
- Low Pass Filter High Pass Filter: Amplitude (DB) Amplitude (DB)Dokument2 SeitenLow Pass Filter High Pass Filter: Amplitude (DB) Amplitude (DB)Francisco BennettNoch keine Bewertungen
- Lab 5Dokument3 SeitenLab 5Francisco BennettNoch keine Bewertungen
- Lab 1 - Analysis of A TrussDokument4 SeitenLab 1 - Analysis of A TrussFrancisco BennettNoch keine Bewertungen
- Meal Swipe CostsDokument1 SeiteMeal Swipe CostsFrancisco BennettNoch keine Bewertungen
- Lab 4Dokument5 SeitenLab 4Francisco BennettNoch keine Bewertungen
- Policies For Undergraduate ProjectsDokument9 SeitenPolicies For Undergraduate ProjectsFrancisco BennettNoch keine Bewertungen
- Combustion TablesDokument6 SeitenCombustion TablesFrancisco BennettNoch keine Bewertungen
- Lab 2Dokument1 SeiteLab 2Francisco BennettNoch keine Bewertungen
- Lab 3Dokument1 SeiteLab 3Francisco BennettNoch keine Bewertungen
- Lab 3Dokument1 SeiteLab 3Francisco BennettNoch keine Bewertungen
- Liberal Studies ListDokument1 SeiteLiberal Studies ListFrancisco BennettNoch keine Bewertungen
- Install Guide MatlabDokument163 SeitenInstall Guide MatlabSlodnuliusNoch keine Bewertungen
- Cornell Engineering Handbook 2012 13Dokument158 SeitenCornell Engineering Handbook 2012 13Anas BachiriNoch keine Bewertungen
- Nikon D3200Dokument228 SeitenNikon D3200Mieczysław MichalczewskiNoch keine Bewertungen
- Iot Security (Internet of Things Security)Dokument7 SeitenIot Security (Internet of Things Security)RajNoch keine Bewertungen
- FacilityPro SCADA NG Software User Guide Rev BDokument217 SeitenFacilityPro SCADA NG Software User Guide Rev BDaniel FuentesNoch keine Bewertungen
- Study On Greening Cloud Computing and Electronic Communications Services and NetworksDokument356 SeitenStudy On Greening Cloud Computing and Electronic Communications Services and NetworksSelima BEN MAHMOUDNoch keine Bewertungen
- Anchs Shstvlict12 Q1 M1 L02 WK4 6Dokument22 SeitenAnchs Shstvlict12 Q1 M1 L02 WK4 6Ella Mae GadianNoch keine Bewertungen
- GATE Data Base Management System BookDokument12 SeitenGATE Data Base Management System BookMims12Noch keine Bewertungen
- Computer Science (Fe) Mcq'sDokument41 SeitenComputer Science (Fe) Mcq'scutyverma100% (1)
- Implementing Cisco Service Provider Next-Generation Core Network ServicesDokument9 SeitenImplementing Cisco Service Provider Next-Generation Core Network ServicesPak ChannNoch keine Bewertungen
- WD19DC Dell Docking Station TroubleshootDokument6 SeitenWD19DC Dell Docking Station TroubleshootTiffany DacinoNoch keine Bewertungen
- Project ReportDokument29 SeitenProject ReportSathishkumarNoch keine Bewertungen
- CP FinalDokument165 SeitenCP FinalVikki KotaNoch keine Bewertungen
- Worksheet: Fioofile AppsDokument1 SeiteWorksheet: Fioofile AppsedaragagansridweepNoch keine Bewertungen
- M037 Exaquantum Administrator Course Day 1Dokument112 SeitenM037 Exaquantum Administrator Course Day 1Saulius ŽilinskasNoch keine Bewertungen
- Pyqt5 Project 2Dokument11 SeitenPyqt5 Project 2Yash RajputNoch keine Bewertungen
- ProjectDokument10 SeitenProjectgvnviki17Noch keine Bewertungen
- Google China Hit by Cyber Attack: What Happened?Dokument10 SeitenGoogle China Hit by Cyber Attack: What Happened?Umasankar JenaNoch keine Bewertungen
- Java Training AssignmentsDokument11 SeitenJava Training AssignmentsTushar Gupta100% (1)
- Cdac PrepareDokument2 SeitenCdac PrepareKushagra Singh50% (2)
- Day One - Automating Junos® With AnsibleDokument318 SeitenDay One - Automating Junos® With Ansibleopenid_dr4OPAdENoch keine Bewertungen
- Sy 2017-2018 Basic Education Department: La Salette of Roxas CollegeDokument2 SeitenSy 2017-2018 Basic Education Department: La Salette of Roxas CollegeRichard Melvin GarciaNoch keine Bewertungen
- Computing Project: Topic 1Dokument45 SeitenComputing Project: Topic 1Kay TunNoch keine Bewertungen
- Directx SDK EulaDokument6 SeitenDirectx SDK Eulaanon-117073100% (1)
- SahanaDokument6 SeitenSahanaSavari RajNoch keine Bewertungen
- Incremental Migration (IMIG) : Before You Begin 1Dokument7 SeitenIncremental Migration (IMIG) : Before You Begin 1jaleelpeace9157Noch keine Bewertungen
- CodersTrust Responsive Web Design - DecDokument2 SeitenCodersTrust Responsive Web Design - DecclementNoch keine Bewertungen
- DLMIGCR01-01 - E - Reading ListDokument6 SeitenDLMIGCR01-01 - E - Reading ListPabitra RoyNoch keine Bewertungen
- RCP Technical Bulletin 20-2013-115 PDFDokument13 SeitenRCP Technical Bulletin 20-2013-115 PDFRogelio RodriguezNoch keine Bewertungen
- Glossary - Chapter 18 Artistic EffectsDokument4 SeitenGlossary - Chapter 18 Artistic EffectsBuse 7Noch keine Bewertungen
- 25882506Dokument5 Seiten25882506swarajdesh251044Noch keine Bewertungen
- Important Sap Basis TcodesDokument8 SeitenImportant Sap Basis Tcodessairam898Noch keine Bewertungen
- Classical IPC ProblemsDokument15 SeitenClassical IPC ProblemsFariha Nuzhat MajumdarNoch keine Bewertungen