Das könnte Ihnen auch gefallen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Pnbcontr0223en (Web)Dokument308 SeitenPnbcontr0223en (Web)James GeorgeNoch keine Bewertungen
- Cutting Room Agility and ExcellenceDokument8 SeitenCutting Room Agility and Excellenceperro perezNoch keine Bewertungen
- Method Statement - Refrigerant PipingDokument7 SeitenMethod Statement - Refrigerant PipingGirithar M SundaramNoch keine Bewertungen
- Monitoring:: Steps of Adding New SiteDokument8 SeitenMonitoring:: Steps of Adding New SiteMohammad ZakoutNoch keine Bewertungen
- Carbon Emissions Don't Cause Global Warming: BackgroundDokument5 SeitenCarbon Emissions Don't Cause Global Warming: BackgroundLibertyAustraliaNoch keine Bewertungen
- Stratigraphy MCQs With AnswerDokument10 SeitenStratigraphy MCQs With Answerkumar Harsh67% (3)
- Conduit 5Dokument42 SeitenConduit 5dediNoch keine Bewertungen
- KRC1 Start-Up PDFDokument29 SeitenKRC1 Start-Up PDFRafael50% (2)
- Opti Turn Tu 2004 V ManualDokument80 SeitenOpti Turn Tu 2004 V ManualCharu NavneetNoch keine Bewertungen
- BiosintezaDokument8 SeitenBiosintezaLovin BiancaNoch keine Bewertungen
- Anil Singh Rathore: Career HighlightsDokument4 SeitenAnil Singh Rathore: Career HighlightsHRD CORP CONSULTANCYNoch keine Bewertungen
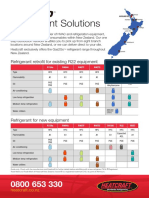
- Refrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentDokument2 SeitenRefrigerant Solutions: Refrigerant Retrofit For Existing R22 EquipmentpriyoNoch keine Bewertungen
- Boil-Off Gas CalculationsDokument14 SeitenBoil-Off Gas CalculationsAlberto100% (1)
- HellforgedDokument89 SeitenHellforgedBrian Rae100% (1)
- Servo Controlled FBW With Power Boost Control, Operations & Maint. ManualDokument126 SeitenServo Controlled FBW With Power Boost Control, Operations & Maint. ManualKota NatarajanNoch keine Bewertungen
- Chapter - 2 - Unit Hydrograph2Dokument33 SeitenChapter - 2 - Unit Hydrograph2Abhilekh PaudelNoch keine Bewertungen
- Shi Et Al-2019-Intensive Care MedicineDokument11 SeitenShi Et Al-2019-Intensive Care MedicineJavier BlancNoch keine Bewertungen
- Lesson 2 Arts of East AsiaDokument21 SeitenLesson 2 Arts of East Asiarenaldo ocampoNoch keine Bewertungen
- Modeling of Conducted EMI (Model Motor Simulink Bun)Dokument8 SeitenModeling of Conducted EMI (Model Motor Simulink Bun)Ioan ŢileaNoch keine Bewertungen
- High Performance Liquid Chromatography: University of Santo Tomas Faculty of Pharmacy Department of BiochemistryDokument32 SeitenHigh Performance Liquid Chromatography: University of Santo Tomas Faculty of Pharmacy Department of BiochemistryMa. Ellah Patricia M. GutierrezNoch keine Bewertungen
- Kingdom Fungi: - Characteristics of Fungi - Oomycota - Zygomycota - Ascomycota - Basidiomycota - DeuteromycotaDokument15 SeitenKingdom Fungi: - Characteristics of Fungi - Oomycota - Zygomycota - Ascomycota - Basidiomycota - DeuteromycotaLeah Rice100% (1)
- Here Is Why Skincare Is ImportantDokument3 SeitenHere Is Why Skincare Is ImportantKevin OkunguNoch keine Bewertungen
- Materi Asking and Offering For HelpDokument9 SeitenMateri Asking and Offering For HelpFranky ArdanaNoch keine Bewertungen
- Miltel - Case Study, Steven Age, UKDokument2 SeitenMiltel - Case Study, Steven Age, UKAnit SahuNoch keine Bewertungen
- Integration of Phodi Process With Mutation in Bhoomi (Simultaneous Approval of Phodi and The Mutation)Dokument19 SeitenIntegration of Phodi Process With Mutation in Bhoomi (Simultaneous Approval of Phodi and The Mutation)seshadrimn seshadrimnNoch keine Bewertungen
- Igorot Village: Get To Know..Dokument11 SeitenIgorot Village: Get To Know..Elain RagosNoch keine Bewertungen
- LC Magna Leaflet 2019Dokument2 SeitenLC Magna Leaflet 2019saemiNoch keine Bewertungen
- SCM 025-108 M2Dokument8 SeitenSCM 025-108 M2kazdanoNoch keine Bewertungen
- Modern Residential Housing in UAEDokument15 SeitenModern Residential Housing in UAEBee Dan BudhachettriNoch keine Bewertungen
- DattadasDokument4 SeitenDattadasJéssica NatáliaNoch keine Bewertungen