Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Lab NumDokument29 SeitenLab NumNavjot Wadhwa0% (1)
- Evaluate: Homework and Practice: x9 - X' (X' - x9)Dokument2 SeitenEvaluate: Homework and Practice: x9 - X' (X' - x9)EnwvNoch keine Bewertungen
- Rohini 93803270119Dokument5 SeitenRohini 93803270119Sareddy KirankumarreddyNoch keine Bewertungen
- AlphaGo Tutorial SlidesDokument16 SeitenAlphaGo Tutorial SlidesDaniel Andrés CrespoNoch keine Bewertungen
- CA Question BankDokument13 SeitenCA Question Bankaryanbamane2003Noch keine Bewertungen
- Matemática PPT - PolynomialsDokument3 SeitenMatemática PPT - Polynomials4gen_5Noch keine Bewertungen
- R-K MethodDokument16 SeitenR-K Method064 Jayapratha P RNoch keine Bewertungen
- Aijy Aj RJ: 5 Y X 7 22 Ily 2 Min 13 T Ily 22 241Dokument2 SeitenAijy Aj RJ: 5 Y X 7 22 Ily 2 Min 13 T Ily 22 241David ToledoNoch keine Bewertungen
- Building Blocks of DNN PDFDokument21 SeitenBuilding Blocks of DNN PDFAmbreen Abdul razzaqueNoch keine Bewertungen
- Chapter 7 - Neural-NetworksDokument60 SeitenChapter 7 - Neural-NetworksBulmi Hilme100% (1)
- Direct MethodsDokument46 SeitenDirect MethodsZambuk TeaNoch keine Bewertungen
- MENDOZADokument3 SeitenMENDOZAbulanangelica19Noch keine Bewertungen
- Graeffe Root-Squaring MethodDokument5 SeitenGraeffe Root-Squaring MethodRania sulaiman100% (1)
- MAN304T Operations Research Practice Problems1 SimplexDokument4 SeitenMAN304T Operations Research Practice Problems1 SimplexP PujethNoch keine Bewertungen
- Energy MinimizationDokument13 SeitenEnergy MinimizationSheetal ThomasNoch keine Bewertungen
- Lec41 (Constrained Optimization)Dokument12 SeitenLec41 (Constrained Optimization)John PintoNoch keine Bewertungen
- 7 Rational Functions Equations InequalitiesDokument27 Seiten7 Rational Functions Equations InequalitiesNathan Kim CastilloNoch keine Bewertungen
- Econometrics Final Paper QuestionDokument3 SeitenEconometrics Final Paper QuestionkhanjiNoch keine Bewertungen
- Euler Method For Solving Differential Equations PDFDokument2 SeitenEuler Method For Solving Differential Equations PDFGaryNoch keine Bewertungen
- Hill Climbing Algorithm in Artificial IntelligenceDokument6 SeitenHill Climbing Algorithm in Artificial IntelligenceNirmal Varghese Babu 2528Noch keine Bewertungen
- Addition of PolynomialsDokument22 SeitenAddition of PolynomialsJudith CuevaNoch keine Bewertungen
- M2 Genomics Informatics and Mathematics For Health and Environment Université Paris-SaclayDokument3 SeitenM2 Genomics Informatics and Mathematics For Health and Environment Université Paris-SaclayJoseph El KhouryNoch keine Bewertungen
- Difference Between Ansys Fluent and Ansys CFX and Ansys CFDDokument1 SeiteDifference Between Ansys Fluent and Ansys CFX and Ansys CFDArtitaya PatniboonNoch keine Bewertungen
- Rift Valley Uiversity Operational Research: Final Exam (2014) Name: - ID - Part One: Multiple ChoicesDokument3 SeitenRift Valley Uiversity Operational Research: Final Exam (2014) Name: - ID - Part One: Multiple ChoicestesfaNoch keine Bewertungen
- Artificial Intelligence For Engineers KMC 101 PDFDokument1 SeiteArtificial Intelligence For Engineers KMC 101 PDFavinas_3marNoch keine Bewertungen
- KIET Group of Institutions: CT-1 Examination (2021-2022) EVEN SemesterDokument3 SeitenKIET Group of Institutions: CT-1 Examination (2021-2022) EVEN SemesterakttripathiNoch keine Bewertungen
- Gaussian Elimination With Partial PivotingDokument4 SeitenGaussian Elimination With Partial PivotingNi SienNoch keine Bewertungen
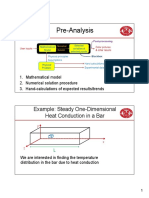
- Pre-Analysis: Example: Steady One-Dimensional Heat Conduction in A BarDokument12 SeitenPre-Analysis: Example: Steady One-Dimensional Heat Conduction in A BarJhuliani CristinaNoch keine Bewertungen
- Back PropagationDokument20 SeitenBack PropagationShame BopeNoch keine Bewertungen