Das könnte Ihnen auch gefallen
- Lab 7Dokument4 SeitenLab 7Rayder S VasquezNoch keine Bewertungen
- Modulación FSKDokument6 SeitenModulación FSKRayder S VasquezNoch keine Bewertungen
- PLC ProbDokument26 SeitenPLC ProbRayder S VasquezNoch keine Bewertungen
- 2 Amplificador InstrumentacionDokument7 Seiten2 Amplificador InstrumentacionRayder S VasquezNoch keine Bewertungen
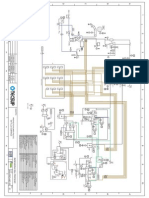
- Planos Planta PilotoDokument1 SeitePlanos Planta PilotoRayder S VasquezNoch keine Bewertungen
- Aplicación N°6Dokument5 SeitenAplicación N°6Rayder S VasquezNoch keine Bewertungen
- Ejercicios de IntegralesDokument6 SeitenEjercicios de Integralesfranz charlieNoch keine Bewertungen
- Problemas de números primos, fracciones, porcentajes y razonesDokument3 SeitenProblemas de números primos, fracciones, porcentajes y razonesNiko JudoNoch keine Bewertungen
- Integrales MúltiplesDokument70 SeitenIntegrales MúltiplesRodil Huillca AnccoNoch keine Bewertungen
- Curvatura de Una CurvaDokument8 SeitenCurvatura de Una CurvaAndrés HernándezNoch keine Bewertungen
- Transformada de LaplaceDokument2 SeitenTransformada de LaplaceJaime Gomez SerranoNoch keine Bewertungen
- Dosificaciones 1° Grado - CE22-23Dokument13 SeitenDosificaciones 1° Grado - CE22-23MATEMATICAS 123Noch keine Bewertungen
- Ejercicios Soluciones Teoriade Numeros 2022Dokument318 SeitenEjercicios Soluciones Teoriade Numeros 2022SEBASTIAN HENAONoch keine Bewertungen
- Unidad 1 - El Teorema Fundamental Del CalculoDokument10 SeitenUnidad 1 - El Teorema Fundamental Del CalculoGaby GaviothithaNoch keine Bewertungen
- Teoría de RamseyDokument7 SeitenTeoría de RamseyaaairplaneNoch keine Bewertungen
- Semántica Por Sustitución de La Lógica de Predicados de Primer OrdenDokument2 SeitenSemántica Por Sustitución de La Lógica de Predicados de Primer OrdenPablo Ariel GonzalezNoch keine Bewertungen
- Cálculo Infinitesimal - Wikipedia, La Enciclopedia LibreDokument9 SeitenCálculo Infinitesimal - Wikipedia, La Enciclopedia LibreVictor Fernando Baca RodriguezNoch keine Bewertungen
- 1.matematicas Con Excel y Con Wolfram Alpha PDFDokument27 Seiten1.matematicas Con Excel y Con Wolfram Alpha PDFPedro SUAREZ SANCHEZNoch keine Bewertungen
- Coordenadas Curvilineas y Calculo VectorialDokument89 SeitenCoordenadas Curvilineas y Calculo Vectorialsombrerodepaja100% (1)
- Unidad 4 (4.4-4.6)Dokument6 SeitenUnidad 4 (4.4-4.6)adrianNoch keine Bewertungen
- Calculo Diferencial e IntegralDokument5 SeitenCalculo Diferencial e IntegralchristianNoch keine Bewertungen
- Problemas de TransporteDokument4 SeitenProblemas de TransporteJhon Ipurre MamaniNoch keine Bewertungen
- Gottfried Leibniz ExposicionDokument7 SeitenGottfried Leibniz ExposicionPablo AlimañaNoch keine Bewertungen
- Origen de Los Numeros ComplejosDokument7 SeitenOrigen de Los Numeros ComplejosPaloma GarcíaNoch keine Bewertungen
- Examen Final - Semana 8 Investigacion de OperacionesDokument14 SeitenExamen Final - Semana 8 Investigacion de OperacionesDeibi Meneses100% (1)
- Semana 8Dokument24 SeitenSemana 8Pacco MaberickNoch keine Bewertungen
- Examen Final CF2C1 2020-I. SolucionarioDokument7 SeitenExamen Final CF2C1 2020-I. SolucionarioJOSE GABRIEL HUACACHI BAZANNoch keine Bewertungen
- Cadenas de Markov PDFDokument12 SeitenCadenas de Markov PDFMarco Andres Munoz AvilaNoch keine Bewertungen
- U3 - Matemáticas 1Dokument20 SeitenU3 - Matemáticas 1Carlos ParedesNoch keine Bewertungen
- Sumas de Riemann 1Dokument28 SeitenSumas de Riemann 1CharlyMuchaRoblesNoch keine Bewertungen
- Félix PalaciosDokument8 SeitenFélix PalaciosFuneraria de la Costa QuibdóNoch keine Bewertungen
- 1 FuncionesDokument14 Seiten1 FuncionesJaime RamirezNoch keine Bewertungen
- Ecuaciones Diferenciales Tarea 1Dokument10 SeitenEcuaciones Diferenciales Tarea 1Isaac Gutierrez SykesNoch keine Bewertungen
- Unidad 2 - Tarea 3 - Sistema de Ecuaciones Lineales Rectas, Planos y Espacios VectorialesDokument14 SeitenUnidad 2 - Tarea 3 - Sistema de Ecuaciones Lineales Rectas, Planos y Espacios VectorialesAngel SuarezNoch keine Bewertungen
- Índice: Tecnológico Nacional de MéxicoDokument12 SeitenÍndice: Tecnológico Nacional de MéxicoVasti GaliciaNoch keine Bewertungen