Das könnte Ihnen auch gefallen
- SIA-ContactIDCodes ProtocolDokument27 SeitenSIA-ContactIDCodes ProtocolCarlos Jesus Torres BrachoNoch keine Bewertungen
- HIGH PERFORMANCE RESONANT CONTROLLERSDokument12 SeitenHIGH PERFORMANCE RESONANT CONTROLLERSNegru P. PlantatieNoch keine Bewertungen
- Top221 227Dokument20 SeitenTop221 227JEVG1Noch keine Bewertungen
- TSP g2k Rev15Dokument4 SeitenTSP g2k Rev15watt madessNoch keine Bewertungen
- 32-Zone Wireless Transceiver Control Panel: User's GuideDokument20 Seiten32-Zone Wireless Transceiver Control Panel: User's GuideNegru P. PlantatieNoch keine Bewertungen
- Manual Utilizare Paradox Spectra MagellanDokument32 SeitenManual Utilizare Paradox Spectra MagellanRadu ReluNoch keine Bewertungen
- AdemCo Contact IdDokument6 SeitenAdemCo Contact IdRafael RicciNoch keine Bewertungen
- The Secure Way of LivingDokument4 SeitenThe Secure Way of LivingNegru P. PlantatieNoch keine Bewertungen
- TSP g2k Rev15Dokument4 SeitenTSP g2k Rev15watt madessNoch keine Bewertungen
- SP7000 ManualDokument72 SeitenSP7000 ManualMatas DoviltisNoch keine Bewertungen
- Ghid de Programare ParadoxDokument72 SeitenGhid de Programare ParadoxRaducu BaetuNoch keine Bewertungen
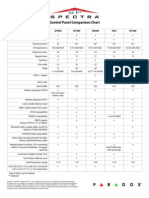
- Control Panel Comparison Chart: Feature SP4000 SP5500 SP6000 SP65 SP7000Dokument1 SeiteControl Panel Comparison Chart: Feature SP4000 SP5500 SP6000 SP65 SP7000Yew Toh TatNoch keine Bewertungen
- MG SP - Programming Guide PDFDokument76 SeitenMG SP - Programming Guide PDFEdgar BazánNoch keine Bewertungen
- Manual Utilizare Paradox Spectra MagellanDokument32 SeitenManual Utilizare Paradox Spectra MagellanRadu ReluNoch keine Bewertungen
- Living with StayD Home Security SystemDokument2 SeitenLiving with StayD Home Security SystemHans DubarryNoch keine Bewertungen
- Õåìîòåõíèêà, äèàãíîñòèêà è ðåìîíò èñòî÷íèêîâ áåñïåðåáîéíîãî ïèòàíèÿDokument1 SeiteÕåìîòåõíèêà, äèàãíîñòèêà è ðåìîíò èñòî÷íèêîâ áåñïåðåáîéíîãî ïèòàíèÿNegru P. PlantatieNoch keine Bewertungen
- Apcupsd ManualDokument115 SeitenApcupsd ManualDinh Viet ThangNoch keine Bewertungen
- Smart UPSDokument20 SeitenSmart UPSHashimIdreesNoch keine Bewertungen
- Knowledge Calibration ValuesDokument18 SeitenKnowledge Calibration ValuesNegru P. PlantatieNoch keine Bewertungen
- SPECS UPS Link ProtocolDokument37 SeitenSPECS UPS Link Protocolindians jonesNoch keine Bewertungen
- Knowledge Calibration ValuesDokument18 SeitenKnowledge Calibration ValuesNegru P. PlantatieNoch keine Bewertungen
- Product CatalogueDokument40 SeitenProduct CatalogueNegru P. PlantatieNoch keine Bewertungen
- Service Manual For The APC Smart UPS 450 700 1000 1400 UPS PDFDokument44 SeitenService Manual For The APC Smart UPS 450 700 1000 1400 UPS PDFBubai BhattacharyyaNoch keine Bewertungen
- Uninterruptible Power Supply Circuitry Design Apc Smartups 1000Dokument19 SeitenUninterruptible Power Supply Circuitry Design Apc Smartups 1000Negru P. PlantatieNoch keine Bewertungen
- How To Fix An APC UPS That's Not Charging Its BatteryDokument3 SeitenHow To Fix An APC UPS That's Not Charging Its BatteryNegru P. PlantatieNoch keine Bewertungen
- HP ENVY Laptop 13-Ba0001nn: Ready Whenever Inspiration StrikesDokument4 SeitenHP ENVY Laptop 13-Ba0001nn: Ready Whenever Inspiration StrikesNegru P. PlantatieNoch keine Bewertungen
- Õåìîòåõíèêà, äèàãíîñòèêà è ðåìîíò èñòî÷íèêîâ áåñïåðåáîéíîãî ïèòàíèÿDokument1 SeiteÕåìîòåõíèêà, äèàãíîñòèêà è ðåìîíò èñòî÷íèêîâ áåñïåðåáîéíîãî ïèòàíèÿNegru P. PlantatieNoch keine Bewertungen
- Uninterruptible Power Supply Circuitry Design Apc Smartups 1000Dokument19 SeitenUninterruptible Power Supply Circuitry Design Apc Smartups 1000Negru P. PlantatieNoch keine Bewertungen
- SP 107595Dokument2 SeitenSP 107595Negru P. PlantatieNoch keine Bewertungen
- PCB B REV 2 schematic guideDokument1 SeitePCB B REV 2 schematic guideBussy PaulNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- PC & Tech Authority - November 2014 AU PDFDokument116 SeitenPC & Tech Authority - November 2014 AU PDFcarolcarl2012Noch keine Bewertungen
- Integration TechniqueDokument125 SeitenIntegration TechniqueShafi NibrajNoch keine Bewertungen
- ProUSB Card Lock Manual in ENGLISHDokument26 SeitenProUSB Card Lock Manual in ENGLISHNAEEM AL-HASSANNoch keine Bewertungen
- Sc2 Cissp test4prep 全真英文模擬題715題Dokument500 SeitenSc2 Cissp test4prep 全真英文模擬題715題bmnlthyukNoch keine Bewertungen
- Vampire WalkthorughDokument80 SeitenVampire Walkthorughal064017Noch keine Bewertungen
- CISSP Training Kit PDFDokument817 SeitenCISSP Training Kit PDFedu100% (1)
- It ProjectDokument6 SeitenIt Projectruchika singhNoch keine Bewertungen
- An Example of The RSA AlgorithmDokument4 SeitenAn Example of The RSA AlgorithmstephenrajNoch keine Bewertungen
- Dept of Internal Affairs V Mansfield Judgement 20130814Dokument25 SeitenDept of Internal Affairs V Mansfield Judgement 20130814Juha SaarinenNoch keine Bewertungen
- Scte 201 2018Dokument34 SeitenScte 201 2018Dognaldo JesusNoch keine Bewertungen
- Crime Analyst For Arcgis: Geographic Information Systems in Public SafetyDokument15 SeitenCrime Analyst For Arcgis: Geographic Information Systems in Public SafetyDavidNoch keine Bewertungen
- Psycho-Pass Legend - Shikkoukan Kougami Shinya - Risoukyou No Ryouken - Volume 01 Chapter 00-02 Part 1Dokument56 SeitenPsycho-Pass Legend - Shikkoukan Kougami Shinya - Risoukyou No Ryouken - Volume 01 Chapter 00-02 Part 1Fahmi nudin hidayatullohNoch keine Bewertungen
- 312-76 Sample Questions PDFDokument6 Seiten312-76 Sample Questions PDFSaad ShimjeeNoch keine Bewertungen
- LinksDokument4 SeitenLinksEduardo Pereira0% (1)
- Cyber-Security-Infographic - FCADokument1 SeiteCyber-Security-Infographic - FCAMousumi Utkarsh RayNoch keine Bewertungen
- DIDM NGIS PresentationDokument53 SeitenDIDM NGIS PresentationJan HuesNoch keine Bewertungen
- Lista Corp DiplomaticDokument140 SeitenLista Corp DiplomaticJeromy PerezNoch keine Bewertungen
- Consent Form Template 2Dokument2 SeitenConsent Form Template 2Vanya QuistoNoch keine Bewertungen
- Fundamentals of Network SecurityDokument475 SeitenFundamentals of Network Securitynave1010% (1)
- Handbook On European Data Protection LawDokument204 SeitenHandbook On European Data Protection LawMara RevkinNoch keine Bewertungen
- 2400 Codebreakers v1.1 B&WDokument2 Seiten2400 Codebreakers v1.1 B&WHernán JuárezNoch keine Bewertungen
- Android App Security Analysis of EATL Store AppsDokument22 SeitenAndroid App Security Analysis of EATL Store AppsSultan Ahmed SagorNoch keine Bewertungen
- UVM Tutorial For Candy Lovers - 24Dokument15 SeitenUVM Tutorial For Candy Lovers - 24VIKRAMNoch keine Bewertungen
- Warrants and Seizures Digest 23-24Dokument2 SeitenWarrants and Seizures Digest 23-24Steve Uy0% (1)
- Tracking GhostNet: Investigating A Cyber Espionage NetworkDokument53 SeitenTracking GhostNet: Investigating A Cyber Espionage NetworkThe SecDev Group99% (169)
- International Journal of Computer Science and Security (IJCSS), Volume (3), IssueDokument153 SeitenInternational Journal of Computer Science and Security (IJCSS), Volume (3), IssueAI Coordinator - CSC JournalsNoch keine Bewertungen
- UkkonenDokument14 SeitenUkkonenValentinNoch keine Bewertungen
- Master of Cybersecurity & Threat Intelligence:: Uoguelph - Ca/computing/mastercybersecurityDokument1 SeiteMaster of Cybersecurity & Threat Intelligence:: Uoguelph - Ca/computing/mastercybersecurityajajascNoch keine Bewertungen
- From: Hong Ji Yoon (Head.B 90F)Dokument2 SeitenFrom: Hong Ji Yoon (Head.B 90F)Josef PeñasNoch keine Bewertungen
- Virginia Tech Guide For Cyber Security Incident ResponseDokument41 SeitenVirginia Tech Guide For Cyber Security Incident Responsealamgir9100% (4)