Das könnte Ihnen auch gefallen
- Pdms To Caesarii Interface Stress-CDokument29 SeitenPdms To Caesarii Interface Stress-CvinvqNoch keine Bewertungen
- Katebi Et Al Pipeline PaperDokument13 SeitenKatebi Et Al Pipeline PaperCurtis PattersonNoch keine Bewertungen
- DNV-CG-0493 2023-01Dokument13 SeitenDNV-CG-0493 2023-01wfxNoch keine Bewertungen
- Anayo Ogazi Thesis 2011Dokument306 SeitenAnayo Ogazi Thesis 2011Ton PhichitNoch keine Bewertungen
- Examples Applying Fea Results With Caesar II Models Webinar PDFDokument36 SeitenExamples Applying Fea Results With Caesar II Models Webinar PDFkorbelNoch keine Bewertungen
- PSV CatalogDokument60 SeitenPSV Catalogbuler empatsatuduaNoch keine Bewertungen
- Client: Medco E & P Lematang Project Title: Singa Gas Development Project Location: Lematang Block, South SumateraDokument7 SeitenClient: Medco E & P Lematang Project Title: Singa Gas Development Project Location: Lematang Block, South SumateraRohmat Benny IsmantoNoch keine Bewertungen
- Nozzle Load - Air CoolerDokument1 SeiteNozzle Load - Air Coolerduf fu0% (1)
- Web Using FesifDokument3 SeitenWeb Using FesifnurilmuNoch keine Bewertungen
- M0237 01 RBP PD RP 3013Dokument159 SeitenM0237 01 RBP PD RP 3013harishNoch keine Bewertungen
- Modeling For Caesar Ii Piping Stress AnalysisDokument37 SeitenModeling For Caesar Ii Piping Stress Analysisrajeevfa100% (1)
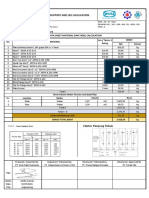
- Support and Leg Calculation: Data Sheet Material Dan Tabel CalculationDokument3 SeitenSupport and Leg Calculation: Data Sheet Material Dan Tabel CalculationliusNoch keine Bewertungen
- FE107 Experimental ResultsDokument11 SeitenFE107 Experimental ResultsEsapermana RiyanNoch keine Bewertungen
- PSV Closed System ForceDokument6 SeitenPSV Closed System ForceSharun SureshNoch keine Bewertungen
- CAESAR II Modeling Thin-Walled PipeDokument2 SeitenCAESAR II Modeling Thin-Walled Pipebee4manu100% (1)
- PSV Reaction Force Calculation: For Any Gas, Vapor, or SteamDokument1 SeitePSV Reaction Force Calculation: For Any Gas, Vapor, or Steam20jose12luisNoch keine Bewertungen
- Thermal BowingDokument8 SeitenThermal BowingA. VenugopalNoch keine Bewertungen
- Pipeline Virtual AnchorDokument15 SeitenPipeline Virtual AnchormaninventorNoch keine Bewertungen
- Fatigue Analysis Using CAESAR IIDokument7 SeitenFatigue Analysis Using CAESAR IIayoungaNoch keine Bewertungen
- Pipng Stress Analysis Design Guide: Pagmi Phase I Project PROJECT NO.3235-200Dokument11 SeitenPipng Stress Analysis Design Guide: Pagmi Phase I Project PROJECT NO.3235-200Salma BacharNoch keine Bewertungen
- 2009W ENGI 8673 L17 Ex 17 01 PDFDokument3 Seiten2009W ENGI 8673 L17 Ex 17 01 PDFThyago de LellysNoch keine Bewertungen
- Cobalch Aps - PTFE DetailDokument25 SeitenCobalch Aps - PTFE DetailMorteza DianatfarNoch keine Bewertungen
- Local Stress CheckDokument7 SeitenLocal Stress Checkprabhakaran.cNoch keine Bewertungen
- Conserve - Simulation &analysis - Project ReferenceDokument41 SeitenConserve - Simulation &analysis - Project ReferenceHatem AbdallahNoch keine Bewertungen
- 1Dokument7 Seiten1sri9987Noch keine Bewertungen
- CAESAR II Software BasicsDokument28 SeitenCAESAR II Software BasicsanishsrNoch keine Bewertungen
- Dry Gas Rapid Valve OpeningCheckDokument1 SeiteDry Gas Rapid Valve OpeningCheckDhia SlamaNoch keine Bewertungen
- The Art of Designing Pipe Support SystemsDokument6 SeitenThe Art of Designing Pipe Support SystemsguluuNoch keine Bewertungen
- Bakhrabad Siddhirganj Pipeline Project Piping / Equipment Specifications For Launcher and ReceiverDokument8 SeitenBakhrabad Siddhirganj Pipeline Project Piping / Equipment Specifications For Launcher and ReceiverIbad AlamNoch keine Bewertungen
- Pipeng Toolbox - ASME B31.3 Process Piping Thermal Expansion Data ModuleDokument2 SeitenPipeng Toolbox - ASME B31.3 Process Piping Thermal Expansion Data ModuleHabib ur RehmanNoch keine Bewertungen
- Equipment NoiseDokument17 SeitenEquipment Noiseaslam.ambNoch keine Bewertungen
- Role of PressureDokument4 SeitenRole of PressureTumu MarakanNoch keine Bewertungen
- Pipe Loading - Pipe BridgeDokument3 SeitenPipe Loading - Pipe BridgeSrishti Project ConsultantsNoch keine Bewertungen
- StressISO TroubleshootingDokument31 SeitenStressISO TroubleshootingDarren Kam100% (1)
- Case Study To Find Tank Nozzle Stiffness, Flexibility and Allowable Loads by API650 Using PASS START PROFDokument15 SeitenCase Study To Find Tank Nozzle Stiffness, Flexibility and Allowable Loads by API650 Using PASS START PROFJafer SayedNoch keine Bewertungen
- Applicability of Caesar II For Stress Analysis of Lines Having DT Ratio More Than 100 PDFDokument2 SeitenApplicability of Caesar II For Stress Analysis of Lines Having DT Ratio More Than 100 PDFBogdan ChivulescuNoch keine Bewertungen
- Pvp1998-Vol368 1Dokument5 SeitenPvp1998-Vol368 1Nisarg PatelNoch keine Bewertungen
- EEMUA Calculation ReportDokument3 SeitenEEMUA Calculation Reportduf fuNoch keine Bewertungen
- Seismic AnalysisDokument4 SeitenSeismic AnalysisAnkithNoch keine Bewertungen
- Volume - IIDokument585 SeitenVolume - IIRaji VargheseNoch keine Bewertungen
- 4-PU101-PR-DI-029 14 SheetsDokument16 Seiten4-PU101-PR-DI-029 14 SheetsBurhan Ayub100% (1)
- Stress Range Histories and Rain FlowcountingDokument13 SeitenStress Range Histories and Rain FlowcountingM AYGULNoch keine Bewertungen
- Buried Pipe ModelingDokument22 SeitenBuried Pipe ModelingPeter Rodriguez100% (1)
- FlangeDokument7 SeitenFlangenandhamech25Noch keine Bewertungen
- Caesar II Soil Modeler - American Lifelines Alliance - Intergraph CADWorx - Analysis PDFDokument4 SeitenCaesar II Soil Modeler - American Lifelines Alliance - Intergraph CADWorx - Analysis PDFSharun SureshNoch keine Bewertungen
- Nozzle PDFDokument8 SeitenNozzle PDFtavo1293Noch keine Bewertungen
- WRC 107 WRC 297 Co MP PDFDokument11 SeitenWRC 107 WRC 297 Co MP PDFIqbal Muhammad100% (1)
- COADE Friction StiffnessDokument1 SeiteCOADE Friction Stiffnessniteshk_45Noch keine Bewertungen
- Free Span Design According To The DNV-RP-F105 For Free Spanning PipelinesDokument24 SeitenFree Span Design According To The DNV-RP-F105 For Free Spanning PipelinesconanbhNoch keine Bewertungen
- Asme Steam Hammer CritiqueDokument11 SeitenAsme Steam Hammer Critique이승원100% (1)
- Modeling Spring Cans With FrictionDokument1 SeiteModeling Spring Cans With FrictionKirana SbNoch keine Bewertungen
- Finite Element Analysis For PipingDokument9 SeitenFinite Element Analysis For PipingMahesh RathoreNoch keine Bewertungen
- YS2-03-C10017-TL-BOD-L-001 Rev A0 - Piping Design BasisDokument26 SeitenYS2-03-C10017-TL-BOD-L-001 Rev A0 - Piping Design BasisameerNoch keine Bewertungen
- Estudo de Caso - Asme 2398Dokument6 SeitenEstudo de Caso - Asme 2398biancogallazziNoch keine Bewertungen
- Avoiding Acoustic-Induced VibrationDokument4 SeitenAvoiding Acoustic-Induced VibrationRajesh RagoobirNoch keine Bewertungen
- Anchor Block (Combined)Dokument210 SeitenAnchor Block (Combined)Bishnu Thapa MagarNoch keine Bewertungen
- DummyDokument12 SeitenDummyrajkamal eshwarNoch keine Bewertungen
- G-P-Pi 270 enDokument10 SeitenG-P-Pi 270 endeicaNoch keine Bewertungen
- CAEPIPE Users ManualDokument257 SeitenCAEPIPE Users ManualFATIMA TORRADO CASASNoch keine Bewertungen
- Non Convergence in Caesar IIDokument11 SeitenNon Convergence in Caesar IIarjunprasannan7Noch keine Bewertungen
- KB1250F1Dokument2 SeitenKB1250F1Peter PeterNoch keine Bewertungen
- What Is An AtheistDokument62 SeitenWhat Is An AtheistLBL_LowkeeNoch keine Bewertungen
- 15CV553 PDFDokument2 Seiten15CV553 PDFDeepak OraonNoch keine Bewertungen
- Introduction To The Visual Basic Programming LanguageDokument24 SeitenIntroduction To The Visual Basic Programming Languageapi-3749038100% (1)
- Icc Esr-1385 Kb3 MasonryDokument4 SeitenIcc Esr-1385 Kb3 MasonryxpertsteelNoch keine Bewertungen
- Ondemand: Key SpecificationsDokument2 SeitenOndemand: Key SpecificationsNUBIA DIAZNoch keine Bewertungen
- Lucifer's Mirror and The Emancipation of OnenessDokument23 SeitenLucifer's Mirror and The Emancipation of OnenessTony BermansederNoch keine Bewertungen
- CH 13Dokument27 SeitenCH 13Shaivy TyagiNoch keine Bewertungen
- Lipid WorksheetDokument2 SeitenLipid WorksheetMANUELA VENEGAS ESCOVARNoch keine Bewertungen
- Tutorial On SchedulingDokument14 SeitenTutorial On Schedulingrktiwary256034Noch keine Bewertungen
- Danfoss FC 301-302 AngDokument268 SeitenDanfoss FC 301-302 AngkudakwasheNoch keine Bewertungen
- Disomat Tersus: Instruction ManualDokument268 SeitenDisomat Tersus: Instruction ManualMohamed Hamad100% (1)
- Ecs448 Chapter 5a ArchDokument28 SeitenEcs448 Chapter 5a Archdixn__Noch keine Bewertungen
- Che 243 Fluid Dynamics: Problem Set #4 Solutions: SolutionDokument9 SeitenChe 243 Fluid Dynamics: Problem Set #4 Solutions: SolutionKyungtae Park100% (2)
- Discovery of A New Energy VortexDokument4 SeitenDiscovery of A New Energy Vortexnblack3335140Noch keine Bewertungen
- An Analysis of Stravinsky's Symphony of Psalms Focusing On Tonality and HarmonyDokument68 SeitenAn Analysis of Stravinsky's Symphony of Psalms Focusing On Tonality and Harmonyr-c-a-d100% (2)
- Opsis Technique Eng 2007Dokument4 SeitenOpsis Technique Eng 2007sukumariicbNoch keine Bewertungen
- On The Way To Zero Defect of Plastic-Encapsulated Electronic Power DevicesPart III Chip Coating Passivation and DesignDokument8 SeitenOn The Way To Zero Defect of Plastic-Encapsulated Electronic Power DevicesPart III Chip Coating Passivation and DesignJiyang WangNoch keine Bewertungen
- Important Notes of 10th Class Math Exercise 3.2Dokument12 SeitenImportant Notes of 10th Class Math Exercise 3.2Tayyabah ShahNoch keine Bewertungen
- Crater Lichtenberg and Young Lunar Basalts Tracked by SMARTDokument2 SeitenCrater Lichtenberg and Young Lunar Basalts Tracked by SMARTArcadie BodaleNoch keine Bewertungen
- Fisher 9500 Butterfly Control ValveDokument12 SeitenFisher 9500 Butterfly Control ValveOscarNoch keine Bewertungen
- RoboticsDokument41 SeitenRoboticsMark Jason100% (3)
- PartIII Semiconductor at Equilibrium PrintDokument22 SeitenPartIII Semiconductor at Equilibrium PrintK.bhogendranathareddy KuppireddyNoch keine Bewertungen
- Anatomia Del Pie en Insuficiencia VenosaDokument13 SeitenAnatomia Del Pie en Insuficiencia VenosaDinOritha AtiLanoNoch keine Bewertungen
- Magnetic Resonant Coupling Based Wireless PowerDokument7 SeitenMagnetic Resonant Coupling Based Wireless PowerHartantoNoch keine Bewertungen
- Design of Absorber: 5.1 AbsorptionsDokument13 SeitenDesign of Absorber: 5.1 AbsorptionsNaya Septri HanaNoch keine Bewertungen
- Pfaff Hobbymatic 917 Sewing Machine Instruction ManualDokument88 SeitenPfaff Hobbymatic 917 Sewing Machine Instruction ManualiliiexpugnansNoch keine Bewertungen
- Bis 12894 - 2002Dokument7 SeitenBis 12894 - 2002rabindora6588100% (1)
- Job Salary PredictionDokument23 SeitenJob Salary PredictionShah Momtaj Ala Hriday 171-15-8834Noch keine Bewertungen