Das könnte Ihnen auch gefallen
- SS REPORT 1 BackgroundDokument3 SeitenSS REPORT 1 Backgroundang alexNoch keine Bewertungen
- Chapter 1 - Shear Forces and Bending MomentsDokument27 SeitenChapter 1 - Shear Forces and Bending Momentslinus 24kNoch keine Bewertungen
- Cie 136Dokument151 SeitenCie 136Sancho BilogNoch keine Bewertungen
- Bending Moment ExpDokument14 SeitenBending Moment ExpAitezaz AhsanNoch keine Bewertungen
- SS Report 1Dokument2 SeitenSS Report 1ang alexNoch keine Bewertungen
- Numerical Analysis of Beam Problems With MATLABDokument27 SeitenNumerical Analysis of Beam Problems With MATLABYonatan YakobNoch keine Bewertungen
- Assignment StaticDokument24 SeitenAssignment StaticSuhayl AzminNoch keine Bewertungen
- MD1 Topic 1 Simple StressesDokument8 SeitenMD1 Topic 1 Simple StressesIvan Jeremy AbilaNoch keine Bewertungen
- ES 122 NotesDokument4 SeitenES 122 NotesronieNoch keine Bewertungen
- Strength of MaterialDokument163 SeitenStrength of MaterialJackKiaNoch keine Bewertungen
- Self EvaluationDokument19 SeitenSelf EvaluationRheanna SalutanNoch keine Bewertungen
- MD1 Topic 1 Simple StressesDokument11 SeitenMD1 Topic 1 Simple StressesNowellNoch keine Bewertungen
- Simple Harmonic Motion and Free VibrationDokument25 SeitenSimple Harmonic Motion and Free VibrationSANJAY KUMAR MISHRANoch keine Bewertungen
- Ceg Lab 202Dokument73 SeitenCeg Lab 202Peace AdetunmibiNoch keine Bewertungen
- Calculating The Truss Member ForcesDokument31 SeitenCalculating The Truss Member ForcesOscar Rodríguez100% (1)
- Mechanics of Materia1 Combined Bending and TorsionDokument4 SeitenMechanics of Materia1 Combined Bending and Torsionhammad ghaffarNoch keine Bewertungen
- Bending MomentDokument12 SeitenBending Momenthazheer1100% (2)
- Bolt Pattern Force Distribution - MechaniCalcDokument8 SeitenBolt Pattern Force Distribution - MechaniCalcdomesNoch keine Bewertungen
- Simple Harmonic Motion and Free VibrationDokument25 SeitenSimple Harmonic Motion and Free VibrationSANJAY KUMAR MISHRANoch keine Bewertungen
- Torsional Analysis of Steel MembersDokument6 SeitenTorsional Analysis of Steel MembersSebastiao SilveiraNoch keine Bewertungen
- LectureDokument8 SeitenLectureRohit PareekNoch keine Bewertungen
- IC24Dokument7 SeitenIC24DrSn PadhiNoch keine Bewertungen
- Torsional Analysis of Steel MembersDokument6 SeitenTorsional Analysis of Steel MembersasdasNoch keine Bewertungen
- Members Subjected To Torsional LoadsDokument8 SeitenMembers Subjected To Torsional LoadsRahulkumarchauhanNoch keine Bewertungen
- Sarbast Osman Mero Nawroz UniversityDokument8 SeitenSarbast Osman Mero Nawroz UniversityMd Shahroz AlamNoch keine Bewertungen
- Strength of Materials I: (SI Units)Dokument135 SeitenStrength of Materials I: (SI Units)shjahsjansha100% (3)
- Powerpoint PHY01 CO5Dokument51 SeitenPowerpoint PHY01 CO5HURHURNoch keine Bewertungen
- Strength of Materials: (SI Units)Dokument11 SeitenStrength of Materials: (SI Units)Fitra VertikalNoch keine Bewertungen
- Statics ProjDokument5 SeitenStatics ProjJonaz CruzNoch keine Bewertungen
- Chapter 2 Lecture NoteDokument19 SeitenChapter 2 Lecture NoteeyobNoch keine Bewertungen
- Shear Force and Bending Moment DiagramDokument7 SeitenShear Force and Bending Moment DiagramGokulraju RangasamyNoch keine Bewertungen
- Dynamics of Rotational MotionDokument45 SeitenDynamics of Rotational MotionAudrry Dela CruzNoch keine Bewertungen
- Unit-1 Principal Stresses Theories of FailureDokument29 SeitenUnit-1 Principal Stresses Theories of FailureNarender NarruNoch keine Bewertungen
- Forces and Force SystemsDokument10 SeitenForces and Force SystemsAmiel DionisioNoch keine Bewertungen
- CHAPTER 2design Against Static LoadDokument33 SeitenCHAPTER 2design Against Static LoadmanishtopsecretsNoch keine Bewertungen
- Moment of Inertia of Mass, or The Angular Mass, (SI Units KG M ) Is A Measure of An Object's Resistance ToDokument5 SeitenMoment of Inertia of Mass, or The Angular Mass, (SI Units KG M ) Is A Measure of An Object's Resistance ToMuhammad UzairNoch keine Bewertungen
- Chapter 3 Lecture NoteDokument19 SeitenChapter 3 Lecture NoteYedenekachew NigussieNoch keine Bewertungen
- Three Moment Equation PaperDokument9 SeitenThree Moment Equation PaperAkash SoodNoch keine Bewertungen
- Mechanical Systems 3Dokument34 SeitenMechanical Systems 3sidkhan1Noch keine Bewertungen
- 19ges28 - Engineering Mechanics: DR S.Sudhagar M.E., PHDDokument71 Seiten19ges28 - Engineering Mechanics: DR S.Sudhagar M.E., PHDVanHieu LuyenNoch keine Bewertungen
- SFD & BMDDokument21 SeitenSFD & BMDnacot58559Noch keine Bewertungen
- FCE 301 ADokument11 SeitenFCE 301 Agideon kurNoch keine Bewertungen
- BM and SFDokument4 SeitenBM and SFvempadareddyNoch keine Bewertungen
- Mechanical Vibration CEPDokument15 SeitenMechanical Vibration CEPUsMan WarraichNoch keine Bewertungen
- Shear Force and Bending MomentDokument4 SeitenShear Force and Bending MomentKhawaja Noman BashirNoch keine Bewertungen
- SCI1307Dokument71 SeitenSCI1307Yashika Bhathiya JayasingheNoch keine Bewertungen
- Unit 1 Solid MechanicsDokument21 SeitenUnit 1 Solid MechanicsEdison Chandraseelan67% (3)
- Mechanics PortionDokument55 SeitenMechanics PortionRupak MandalNoch keine Bewertungen
- Strength of Materials-I Chapter - 1 And: Stress StrainDokument42 SeitenStrength of Materials-I Chapter - 1 And: Stress StrainColorgold BirlieNoch keine Bewertungen
- Solved SOM1Dokument11 SeitenSolved SOM1Subhan FarooqiNoch keine Bewertungen
- SFD and BMDDokument10 SeitenSFD and BMDvempadareddyNoch keine Bewertungen
- Shear and Moment Diagram - Wikipedia, The Free EncyclopediaDokument10 SeitenShear and Moment Diagram - Wikipedia, The Free EncyclopediaPrabhat MishraNoch keine Bewertungen
- Bridge Course 22-23 EMDokument12 SeitenBridge Course 22-23 EMAmar BhopiNoch keine Bewertungen
- Structural Analysis R19 - UNIT-1 (Ref-2)Dokument56 SeitenStructural Analysis R19 - UNIT-1 (Ref-2)SushNoch keine Bewertungen
- Som 200323142910Dokument9 SeitenSom 200323142910Asante MandioperaNoch keine Bewertungen
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsVon EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNoch keine Bewertungen
- Nuclear Magnetic Resonance IntroDokument17 SeitenNuclear Magnetic Resonance Introlisan2053Noch keine Bewertungen
- Neuroimaging: MRI of Brain and Brain StemDokument8 SeitenNeuroimaging: MRI of Brain and Brain Stemlisan2053Noch keine Bewertungen
- Earthquake Resistant DesignDokument5 SeitenEarthquake Resistant Designlisan2053Noch keine Bewertungen
- The Karakoram HighwayDokument9 SeitenThe Karakoram Highwaylisan2053Noch keine Bewertungen
- Built Up SectionsDokument2 SeitenBuilt Up Sectionslisan2053Noch keine Bewertungen
- MesopotamiaDokument19 SeitenMesopotamialisan2053100% (2)
- Bituminous Coal or Black Coal Is A Relatively SoftDokument4 SeitenBituminous Coal or Black Coal Is A Relatively Softlisan2053Noch keine Bewertungen
- Incineration Is A: Citation NeededDokument20 SeitenIncineration Is A: Citation Neededlisan2053Noch keine Bewertungen
- Autobahn AutorouteDokument11 SeitenAutobahn Autoroutelisan2053Noch keine Bewertungen
- Structural Integrity and FailureDokument9 SeitenStructural Integrity and Failurelisan2053Noch keine Bewertungen
- Irc 85Dokument16 SeitenIrc 85lisan2053Noch keine Bewertungen
- Landscape ArchitectureDokument9 SeitenLandscape Architecturelisan2053Noch keine Bewertungen
- Sharps: Biomedical Waste Is Waste That Is Either Putrescible or Potentially InfectiousDokument5 SeitenSharps: Biomedical Waste Is Waste That Is Either Putrescible or Potentially Infectiouslisan2053Noch keine Bewertungen
- Waste Management Is The "Generation, Prevention, Characterization, Monitoring, TreatmentDokument13 SeitenWaste Management Is The "Generation, Prevention, Characterization, Monitoring, Treatmentlisan2053Noch keine Bewertungen
- Nuclear ReactionsDokument8 SeitenNuclear Reactionslisan2053Noch keine Bewertungen
- Number TheoryDokument18 SeitenNumber Theorylisan2053Noch keine Bewertungen
- Black Hole TheoryDokument6 SeitenBlack Hole Theorylisan2053Noch keine Bewertungen
- Beijing National StadiumDokument7 SeitenBeijing National Stadiumlisan2053Noch keine Bewertungen
- Seismic RetrofittingDokument21 SeitenSeismic Retrofittinglisan2053Noch keine Bewertungen
- Hide 1 History 2 Overview 3 Simple Stresses 4 General Stress 5 Stress AnalysisDokument17 SeitenHide 1 History 2 Overview 3 Simple Stresses 4 General Stress 5 Stress Analysislisan2053Noch keine Bewertungen
- 3Dokument24 Seiten3Dennis AleaNoch keine Bewertungen
- Samsung Compressor: Il-Free Centrifugal Air Compressor M/SM100/SME SeriesDokument11 SeitenSamsung Compressor: Il-Free Centrifugal Air Compressor M/SM100/SME SeriesSharad KokateNoch keine Bewertungen
- 2021-AP Price List-Fixed Flames Controllers - Issue 3V12 - 20201211 - FinalDokument156 Seiten2021-AP Price List-Fixed Flames Controllers - Issue 3V12 - 20201211 - FinalListyo HandriyantoNoch keine Bewertungen
- Air CompressorDokument48 SeitenAir CompressorMarius Condurache0% (1)
- 4 Location of Hydraulic Components PDFDokument10 Seiten4 Location of Hydraulic Components PDFwesley candidoNoch keine Bewertungen
- CE413 Lecture 3 CFT ColumnDokument22 SeitenCE413 Lecture 3 CFT ColumnShayan AbagnaleNoch keine Bewertungen
- Cellulose Kraft Pulp Reinforced Polylactic Acid (PLA) Composites: Effect of Fibre Moisture ContentDokument14 SeitenCellulose Kraft Pulp Reinforced Polylactic Acid (PLA) Composites: Effect of Fibre Moisture ContentariaerenjaegerNoch keine Bewertungen
- Acid Bases and Salts 2022-23Dokument8 SeitenAcid Bases and Salts 2022-23Yasha RizviNoch keine Bewertungen
- 01 July 2023 Price List Fan For PDFDokument10 Seiten01 July 2023 Price List Fan For PDFadnanchem16Noch keine Bewertungen
- CMOS Fabrication ProcessDokument10 SeitenCMOS Fabrication ProcessJohnMatthewBancilNoch keine Bewertungen
- Physics 5054 P2 Complete Electricity Topical Past Paper (Only Questions)Dokument183 SeitenPhysics 5054 P2 Complete Electricity Topical Past Paper (Only Questions)Manthan ChakrabortyNoch keine Bewertungen
- BTech Chemical RevisedDokument46 SeitenBTech Chemical RevisedRam Krishan SharmaNoch keine Bewertungen
- DEAERATORDokument26 SeitenDEAERATORSai Swaroop100% (2)
- Rowe N Armitage Rock Socketed Piles PDFDokument17 SeitenRowe N Armitage Rock Socketed Piles PDFJonathan Kok100% (1)
- Stauff Clamps Heavy SeriesDokument3 SeitenStauff Clamps Heavy SeriesManoj KumarNoch keine Bewertungen
- Sae J217-2016Dokument3 SeitenSae J217-2016tiramisuweitaoNoch keine Bewertungen
- Anup Kumar CivilDokument35 SeitenAnup Kumar CivilsaisuryaNoch keine Bewertungen
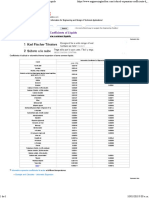
- Volumetric or Cubical Expansion Coefficients of LiquidsDokument1 SeiteVolumetric or Cubical Expansion Coefficients of LiquidsImmerNoch keine Bewertungen
- HACCP TemplateDokument28 SeitenHACCP Templateraphael damanikNoch keine Bewertungen
- Coal Conveyor GuardDokument18 SeitenCoal Conveyor GuardDSG100% (1)
- WEBFORGE - Grating CatalogueDokument10 SeitenWEBFORGE - Grating CatalogueSaravan KumarNoch keine Bewertungen
- Quality Management System: Work Instruction For Roll Inspection and Turning A. New Rolls: InspectionDokument2 SeitenQuality Management System: Work Instruction For Roll Inspection and Turning A. New Rolls: InspectionsourajpatelNoch keine Bewertungen
- Datasheet EE800Dokument3 SeitenDatasheet EE800AdyMichaelNoch keine Bewertungen
- Deaerator ConstructionDokument23 SeitenDeaerator ConstructionRakshit Lobin100% (1)
- Cherry RedDokument1 SeiteCherry Redjcordon-2Noch keine Bewertungen
- Paint Master Bonding Liquid - TDSDokument2 SeitenPaint Master Bonding Liquid - TDSMichael JoudalNoch keine Bewertungen
- Cold Storage & Food PreservationDokument12 SeitenCold Storage & Food PreservationAnurag SinghNoch keine Bewertungen
- Scotch ® Gel Universal Adhesive: Technical Data SheetDokument2 SeitenScotch ® Gel Universal Adhesive: Technical Data SheetFkdkzNoch keine Bewertungen
- May/June 2009Dokument80 SeitenMay/June 2009Rodger BlandNoch keine Bewertungen
- FBE Installation Manual PDFDokument60 SeitenFBE Installation Manual PDFMario R. KallabNoch keine Bewertungen