Das könnte Ihnen auch gefallen
- EMCP 4.3 and 4.4 Generator Set Control Guide (LEBE0007)Dokument328 SeitenEMCP 4.3 and 4.4 Generator Set Control Guide (LEBE0007)Darren R. Flor100% (1)
- DEAO ELV Electrical Wiring DiagramDokument22 SeitenDEAO ELV Electrical Wiring Diagramسکریپ بوائےNoch keine Bewertungen
- Tubes Vs TransistorsDokument18 SeitenTubes Vs TransistorsamapandahukiNoch keine Bewertungen
- CH341A DatasheetDokument22 SeitenCH341A Datasheetflav100050% (2)
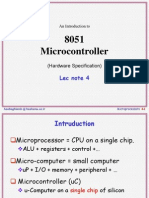
- MCDokument59 SeitenMCPavankumar KalliNoch keine Bewertungen
- 8255 Programmable Peripheral InterfaceDokument78 Seiten8255 Programmable Peripheral Interfaceedwardianirfan89% (9)
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Von EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Noch keine Bewertungen
- How Moog servo valves operate and differences between simplex and TMR controllersDokument5 SeitenHow Moog servo valves operate and differences between simplex and TMR controllersMikoto Rifky100% (1)
- Area Ratio and Stencil Thickness CalculatorDokument6 SeitenArea Ratio and Stencil Thickness Calculatorsmtdrkd100% (1)
- EP - Unit - V - Real World Interfacing With Cortex M4 Based MicrocontrollerDokument114 SeitenEP - Unit - V - Real World Interfacing With Cortex M4 Based Microcontrollerganesh SawantNoch keine Bewertungen
- STM32F407 Parallel I - O Ports. Reference - STM32F407 User ManualDokument23 SeitenSTM32F407 Parallel I - O Ports. Reference - STM32F407 User ManualWalid AmriNoch keine Bewertungen
- ABACOM USB PIO UKDokument28 SeitenABACOM USB PIO UKAkhmad AhmadNoch keine Bewertungen
- ARM STM32L476 Parallel IODokument20 SeitenARM STM32L476 Parallel IOSorin NicolaNoch keine Bewertungen
- PIC - New - Part 1 PIC Microcontroller Systems PDFDokument5 SeitenPIC - New - Part 1 PIC Microcontroller Systems PDFLam Nguyen100% (1)
- 8-Bit PIC Microcontroller Systems GuideDokument28 Seiten8-Bit PIC Microcontroller Systems Guidetrungnghianguyen100% (3)
- Handling Avr Microcontroller Ports: Atmega16A Pin Out DiagramDokument5 SeitenHandling Avr Microcontroller Ports: Atmega16A Pin Out DiagramM.SadatNoch keine Bewertungen
- 16-B D S P A/D C: FeaturesDokument60 Seiten16-B D S P A/D C: FeatureskrajasekarantutiNoch keine Bewertungen
- Part 1Dokument30 SeitenPart 1ady63100% (1)
- lh79524 525 N DatasheetDokument62 Seitenlh79524 525 N Datasheetapi-226948648Noch keine Bewertungen
- AT89S52/ AT89C52 8-Bit MicrocontrollerDokument12 SeitenAT89S52/ AT89C52 8-Bit MicrocontrollerProjects onlineNoch keine Bewertungen
- 16f877a Pic ControllerDokument30 Seiten16f877a Pic Controlleryuvakirani100% (1)
- Unit 5 NotesDokument25 SeitenUnit 5 NoteskaustubhNoch keine Bewertungen
- Atmega328 Features: Atmega48A-48Pa-88A-88Pa-168A-168Pa-328-328P - Datasheet PDFDokument31 SeitenAtmega328 Features: Atmega48A-48Pa-88A-88Pa-168A-168Pa-328-328P - Datasheet PDFIldjohn CarrilloNoch keine Bewertungen
- 8255Dokument34 Seiten8255Manjula Bn100% (1)
- Analog Device Micro ConverterDokument20 SeitenAnalog Device Micro ConvertershaileshNoch keine Bewertungen
- Enhanced 8-Bit Microcontroller With 32 KB Flash Memory: AT89C51AC2 T89C51AC2Dokument121 SeitenEnhanced 8-Bit Microcontroller With 32 KB Flash Memory: AT89C51AC2 T89C51AC2mukhi2006Noch keine Bewertungen
- Topic 10 - AVR IO in C (ISMAIL - FKEUTM 2018)Dokument93 SeitenTopic 10 - AVR IO in C (ISMAIL - FKEUTM 2018)Aya AmirNoch keine Bewertungen
- ANTEX Sound CardsDokument9 SeitenANTEX Sound CardsEmilio I WildeNoch keine Bewertungen
- Robots Need Sensory Input - Guide to Arduino Sensors and ProgrammingDokument4 SeitenRobots Need Sensory Input - Guide to Arduino Sensors and ProgrammingHema hreeNoch keine Bewertungen
- Interfacing LectureDokument136 SeitenInterfacing LectureTewodrosNoch keine Bewertungen
- Lecture Microcontroller OverviewDokument55 SeitenLecture Microcontroller OverviewSamira El MargaeNoch keine Bewertungen
- SH69P26K PDFDokument43 SeitenSH69P26K PDFMarcos Gomes Missel83% (12)
- AN2094 - PSoC® 1 GPIO Pin-Port ReconfigurationDokument8 SeitenAN2094 - PSoC® 1 GPIO Pin-Port ReconfigurationDaniel Eneas Calderon RodriguezNoch keine Bewertungen
- 8-Bit Microcontroller With 4/8K Bytes In-System Programmable Flash Attiny48/88Dokument302 Seiten8-Bit Microcontroller With 4/8K Bytes In-System Programmable Flash Attiny48/88sroaaNoch keine Bewertungen
- Mpmcnotesunit IIIDokument34 SeitenMpmcnotesunit IIIAmy OliverNoch keine Bewertungen
- AtMega32 Data SheetDokument313 SeitenAtMega32 Data SheetSumeet TiwanaNoch keine Bewertungen
- TrustPLC KataloogDokument38 SeitenTrustPLC KataloogNtscJNoch keine Bewertungen
- BASICS OF MICROPROCESSOR PIN CONFIGURATIONDokument15 SeitenBASICS OF MICROPROCESSOR PIN CONFIGURATIONUmar FarooqNoch keine Bewertungen
- ATMEGA32 16PU Atmel Datasheet 530750Dokument345 SeitenATMEGA32 16PU Atmel Datasheet 530750Lakshay KachrooNoch keine Bewertungen
- LC863224ADokument21 SeitenLC863224AJose SintuNoch keine Bewertungen
- Programming 8-Bit Pic Microcontrollers Inc: Martin Bates Elsevier 2008Dokument30 SeitenProgramming 8-Bit Pic Microcontrollers Inc: Martin Bates Elsevier 2008SonyKurupNoch keine Bewertungen
- Input Output Port and InterfacingDokument44 SeitenInput Output Port and Interfacingsk087510100% (1)
- BlueControl DatasheetDokument3 SeitenBlueControl DatasheetSiti Nikmatilah100% (1)
- 4.1 Arduino (Atmega 328P)Dokument8 Seiten4.1 Arduino (Atmega 328P)ALNATRON GROUPSNoch keine Bewertungen
- 3 Clock and GPIOsDokument44 Seiten3 Clock and GPIOs21146387Noch keine Bewertungen
- Port BDokument2 SeitenPort Bgabriel sandovalNoch keine Bewertungen
- Arduino Pro Mini DETAILSDokument2 SeitenArduino Pro Mini DETAILSdhika1617Noch keine Bewertungen
- MCP2016 16 Bit I-O I2C PDFDokument38 SeitenMCP2016 16 Bit I-O I2C PDFwhynot05Noch keine Bewertungen
- (AN778) Implementing External Memory Interface On PIC18C601,801 PDFDokument32 Seiten(AN778) Implementing External Memory Interface On PIC18C601,801 PDFnokchin100% (1)
- ATmega16 Is An 8Dokument3 SeitenATmega16 Is An 8Leon PezićNoch keine Bewertungen
- Ejemplo Diseño Y Simulación de Comparador de 1 Bit Usando Quartus IiDokument17 SeitenEjemplo Diseño Y Simulación de Comparador de 1 Bit Usando Quartus IileoNoch keine Bewertungen
- 1-Getting To Know The BoardDokument4 Seiten1-Getting To Know The BoardaposhekerNoch keine Bewertungen
- D D D D D: DescriptionDokument39 SeitenD D D D D: DescriptionAnonymous o4taPXTPLNoch keine Bewertungen
- Course Project Report of ESDDokument7 SeitenCourse Project Report of ESDRAGHVENDRA ZARKARNoch keine Bewertungen
- Atmega 8Dokument100 SeitenAtmega 8ManikandanNoch keine Bewertungen
- AT89LP6440Dokument200 SeitenAT89LP6440cmbataginiNoch keine Bewertungen
- Presentation Topic: Submitted To: Submitted By: IDDokument19 SeitenPresentation Topic: Submitted To: Submitted By: IDAnik DeyNoch keine Bewertungen
- Arduino MicrocontrollerDokument55 SeitenArduino Microcontrollerpraveen_kodgirwarNoch keine Bewertungen
- Data SheetDokument12 SeitenData SheetpunithNoch keine Bewertungen
- Component DetailsDokument45 SeitenComponent DetailsSHARANYANoch keine Bewertungen
- CH365DS1Dokument20 SeitenCH365DS1HIMEASHNoch keine Bewertungen
- Microcomputer Components: 16-Bit CMOS Single-Chip MicrocontrollerDokument53 SeitenMicrocomputer Components: 16-Bit CMOS Single-Chip MicrocontrollerpassnoNoch keine Bewertungen
- TIAO USB Multi Protocol Adapter ManualDokument8 SeitenTIAO USB Multi Protocol Adapter Manualvabecomp100% (1)
- ATmega328 Internal Architecture GuideDokument22 SeitenATmega328 Internal Architecture Guidesugadev74Noch keine Bewertungen
- EMELEC ON-SITE PARTIAL DISCHARGE MEASUREMENT SERVICESDokument7 SeitenEMELEC ON-SITE PARTIAL DISCHARGE MEASUREMENT SERVICESlatifNoch keine Bewertungen
- Final Report On I7Dokument47 SeitenFinal Report On I7Avneeshwar SinghNoch keine Bewertungen
- Osmium - Os: Chemical Properties of Osmium Health Effects of Osmium Environmental Effects of OsmiumDokument15 SeitenOsmium - Os: Chemical Properties of Osmium Health Effects of Osmium Environmental Effects of Osmiumshoaibansari641Noch keine Bewertungen
- Analysis of Helical Transmission Lines by Means of The Complete Circuit Equations-JoiDokument12 SeitenAnalysis of Helical Transmission Lines by Means of The Complete Circuit Equations-JoieragonindiaNoch keine Bewertungen
- rs2531 RCA Stereo PDFDokument16 Seitenrs2531 RCA Stereo PDFReginald Blinder OdellNoch keine Bewertungen
- Safety and Regulatory Booklet - : © 2020 Sony CorporationDokument32 SeitenSafety and Regulatory Booklet - : © 2020 Sony CorporationAbraham LunaNoch keine Bewertungen
- CI-1580A ENG User ManualDokument50 SeitenCI-1580A ENG User ManualBac Nguyen Viet67% (3)
- Internship Report Complete1Dokument48 SeitenInternship Report Complete1Kaayyoo Koobeeka100% (5)
- Standart Operation Procedure Panel Soft StarterDokument2 SeitenStandart Operation Procedure Panel Soft Starterela elsatriaNoch keine Bewertungen
- Electrical Safety For Laboratory WorkersDokument11 SeitenElectrical Safety For Laboratory WorkersABELWALIDNoch keine Bewertungen
- Description Features: Ltc4100 Smart Battery Charger ControllerDokument30 SeitenDescription Features: Ltc4100 Smart Battery Charger ControllerAlexander VargasNoch keine Bewertungen
- Syllabus of Computer Science and Engineering of Islamic University (CSEIU)Dokument19 SeitenSyllabus of Computer Science and Engineering of Islamic University (CSEIU)Prodipto DelwarNoch keine Bewertungen
- NOTES - 6.1-6.3 - Periodic Table - Trends - Slideshow - 2017 PDFDokument54 SeitenNOTES - 6.1-6.3 - Periodic Table - Trends - Slideshow - 2017 PDFDanielHaileNoch keine Bewertungen
- Lecture 2Dokument26 SeitenLecture 2alessio8Noch keine Bewertungen
- Build Simulink file and connect variables in ControlDeskDokument5 SeitenBuild Simulink file and connect variables in ControlDeskcristian_chituNoch keine Bewertungen
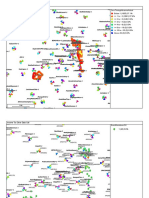
- 2G Drive Test Plot - Sites Serving IT DeptDokument4 Seiten2G Drive Test Plot - Sites Serving IT DeptRavi ShuklaNoch keine Bewertungen
- Design For Safety (DFS) Library Examples of Hazards - Mechanical & Electrical DesignDokument7 SeitenDesign For Safety (DFS) Library Examples of Hazards - Mechanical & Electrical Designg tsNoch keine Bewertungen
- PV Solar Proposal: Harmon ElectricDokument18 SeitenPV Solar Proposal: Harmon ElectricArka EnergyNoch keine Bewertungen
- Chapter7 RTLDokument46 SeitenChapter7 RTLNamrata ChughNoch keine Bewertungen
- TransformersDokument43 SeitenTransformersDavid LeviNoch keine Bewertungen
- Measuring refractive index of liquids using hollow prismDokument11 SeitenMeasuring refractive index of liquids using hollow prismkanishkaranNoch keine Bewertungen
- Intruder alarm control panel manualDokument40 SeitenIntruder alarm control panel manualJohnny WalkerNoch keine Bewertungen
- Magnetism and Electromagnetism: Electrical EngineeringDokument3 SeitenMagnetism and Electromagnetism: Electrical Engineeringiraj shaikhNoch keine Bewertungen
- Manual Crossover Focal Utopia Be CrossblockDokument31 SeitenManual Crossover Focal Utopia Be CrossblockJason B.L. ReyesNoch keine Bewertungen
- PSpice Simulation of Basic DC CircuitsDokument11 SeitenPSpice Simulation of Basic DC CircuitsArifuzzamanFaisalNoch keine Bewertungen